


Researchers at Harvard University have taken inspiration from the swarm construction method used by termites to create TERMES. These robots are intended as the first step in a project with the ultimate goal of creating a fully automated robotic workforce that can create complex structures without the need for centralized control.
The robots are designed “with a philosophy of simplicity” needing to perform only a few simple functions with a high degree of reliability. Each robot houses ten sensors and three actuators in order to detect its position relative to the blocks used in the project as building materials.
TERMES units are only aware of their immediate vicinity and have no concept of the progression on the structure as a whole, or of the work conducted by their fellow robots. They simply progress what is in front of them to its final state.
If necessary, an individual worker robot has the ability to build a structure without the aide of other units as each robot is identical with no central command unit directing or coordinating the workers. Each TERMES has the ability to maneuver both on the structure it is creating, and in unstructured environments, but in their current design, can only operate in flat, obstacle-free areas.
Each robot measures 175 mm (6.8 in) in length with its gripping claw raised and is 110 mm ( 4.3 in) wide by 100 mm (4 in) high, excluding the supporting shelf. Each robot weighs 810g (28.5oz).
Construction and design
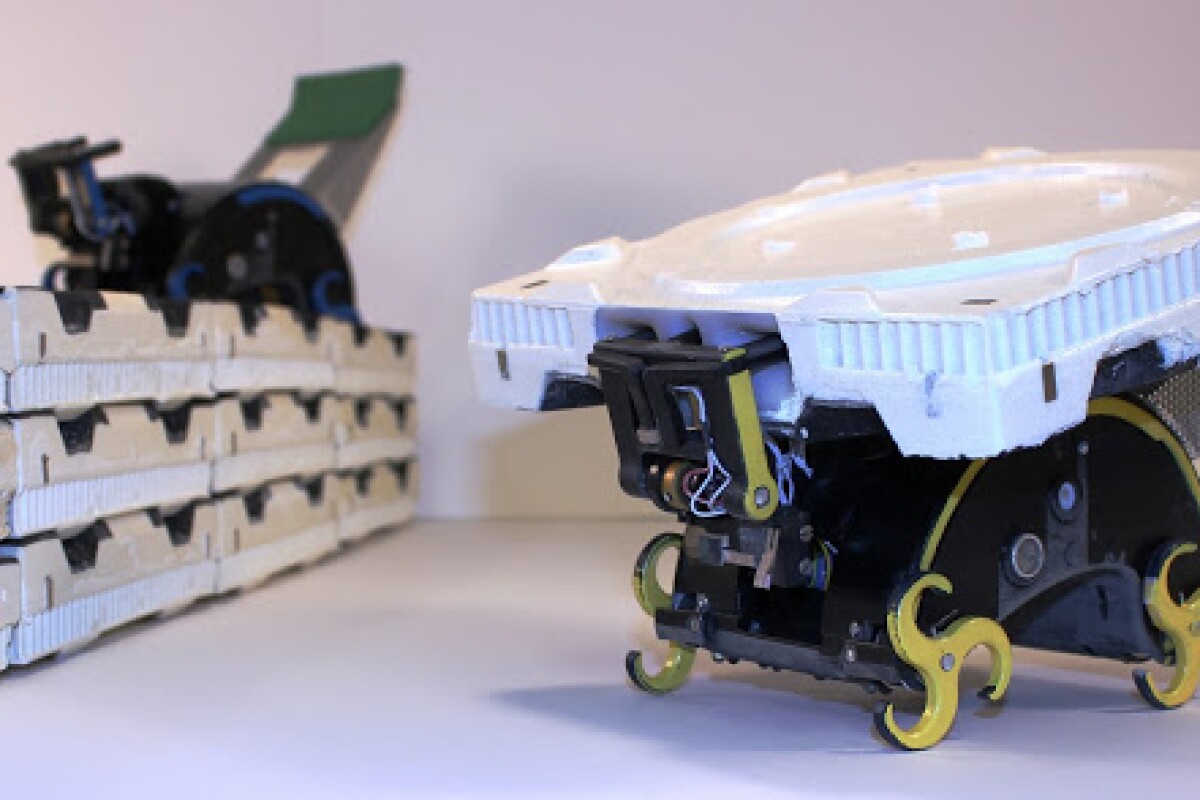
Each robot is constructed via a mixture of 3D printed components and off the shelf items with only a few hand crafted components. The team has used foam construction blocks to test the abilities of its robots. The blocks are built to easily stack together, sliding naturally into place with the help of neodymium magnets attached to each face.
The worker units are fitted with a motorized arm and gripper in order to pick up and manipulate the blocks with a padded shelf on the back to aid in stability and the robots are propelled via two micro metal gear motors. They're also fitted with mercury tilt switch, allowing them to retain a sense of position relative to the blocks if they slip while climbing.
After extensive testing it was decided that the workers would have four small whegs (a combination of a wheel and a leg) angled to fit the notches in the building blocks which would allow them to climb the highest block relative to their size. As well as allowing the robots to climb the blocks, the design also gives them the best chance of traversing more challenging terrain.
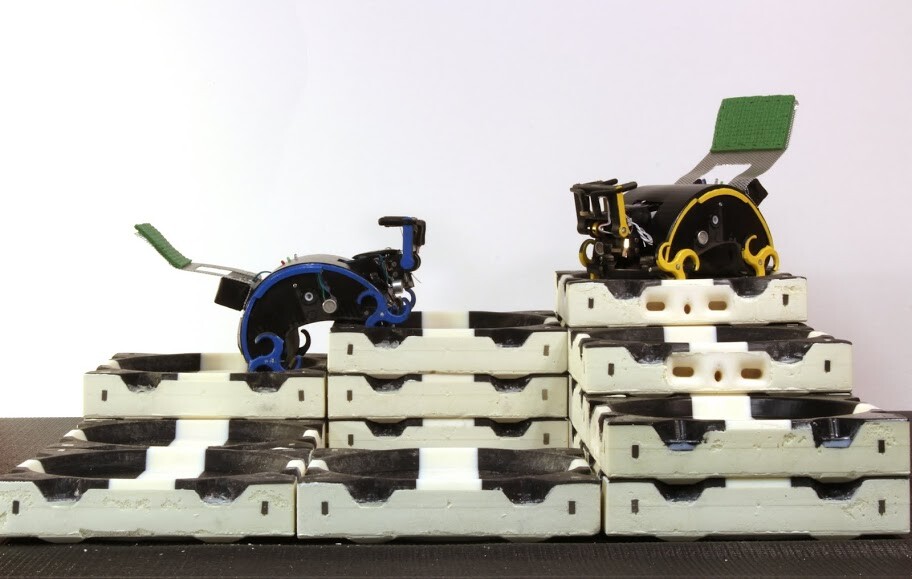
The whegs were given a curved shape in order to allow them to turn on the spot with the aide of circular grooves in the construction blocks, allowing them to maneuver on structures without toppling off. Robots are fitted with a motorized arm and gripper in order to pick up and manipulate the blocks with a padded shelf on the back to aide in carrying them.
All of these features combine to create a highly autonomous and reliable robot with the ability to climb, navigate, manipulate the construction blocks, and combine these abilities to autonomously produce a structure based on the user's design.
Potential benefits
The TERMES project represents a modest first step to the ultimate goal of a fully automated work force. This would remove the necessity of constant human oversight and has the potential to improve speed and efficiency of a building project.The lack of a central control unit would be useful if the robots were to be sent to a high-risk construction area. Ordinarily, if in such circumstances the command unit were to be destroyed, the entire operation would stop. However with the TERMES, each unit is entirely expendable allowing others to simply carry on the work regardless of losses.
Applications for this robotic construction crew could include tasks such as stacking sandbags in a flood or undertaking simple building tasks in harsh environments or on another planet.
A paper outlining the research was published this month in the journal Science.
The robot construction team can be seen in action in the Harvard video below.
Source: Harvard University


