








Most human-like robots don't even attempt biological accuracy, because replicating every muscle in the body isn't necessary for a functional humanoid. Even biomimetic robots based on animals don't attempt to replicate every anatomical detail of the animals they imitate, because that would needlessly complicate things. That said, there is much to be learned from how muscle groups move and interact with the skeleton, which is why a team at Tokyo University's JSK Lab has developed what could be considered the world's most anatomically correct robot to date.
Researchers there have been developing increasingly complex musculoskeletal robots for more than a decade. Their first robot, Kenta, was built in 2001, followed by Kotaro in 2005, Kojiro in 2007, and Kenzoh (an upper-body only robot) in 2010. Their latest robot, Kenshiro, was presented at the annual Humanoids conference this month.
It models the average 12 year-old Japanese boy, standing 158 cm (5 feet, 2 inches) tall and weighing 50 kg (110 pounds). According to Yuto Nakanishi, the project leader, keeping the robot's weight down was a difficult balancing act. Nonetheless, the team managed to create muscles which reproduce nearly the same joint torque as real muscles, and that are roughly five times more powerful than Kojiro's.
Muscle and bone
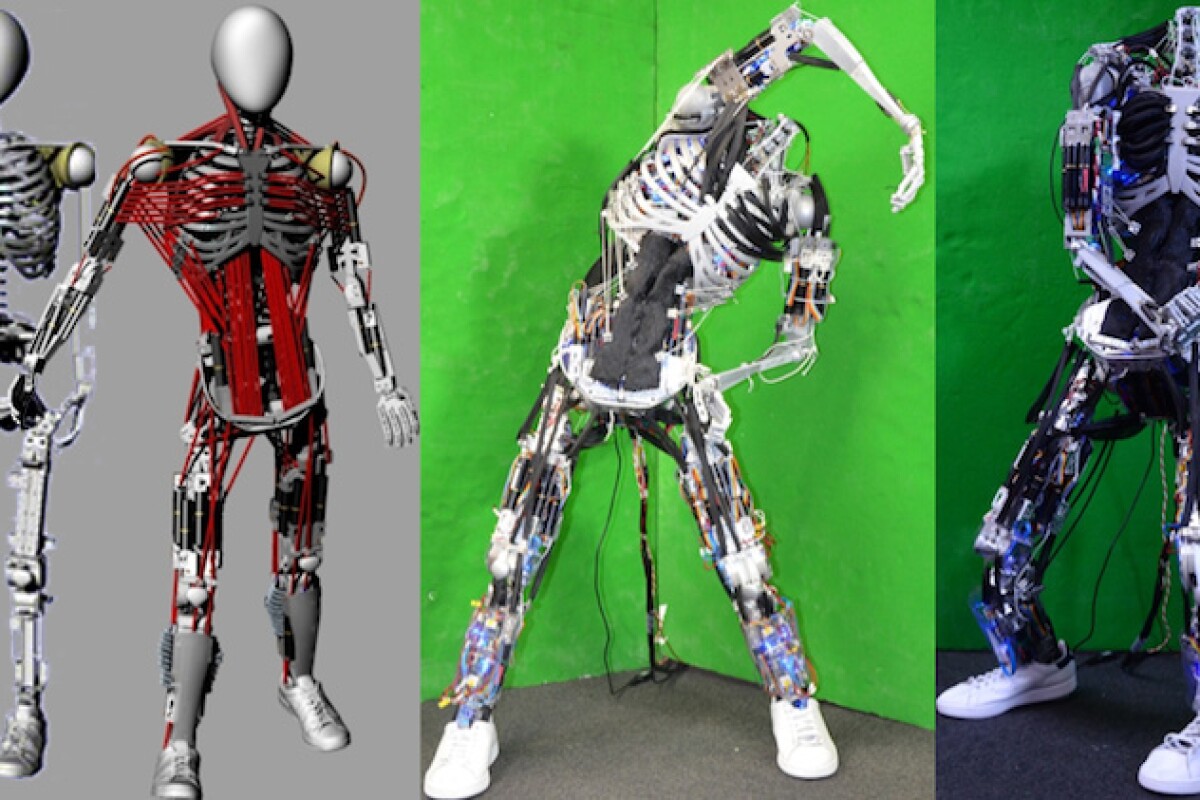
Its artificial muscles – which are a bit like pulleys – replicate 160 major muscles: each leg has 25, each shoulder has 6, the torso has 76, and the neck has 22. Most of these muscles are redundant to Kenshiro's actual degrees of freedom (64), which is why other humanoids don't bother with them. By way of comparison, mechanical robots like Samsung's Roboray typically have just six servos per leg, and often don't contain any in the torso/spine (the human body actually contains around 650 muscles).

Equally important to the muscles is Kenshiro's bone structure. Unlike its predecessors, Kenshiro's skeleton was made out of aluminum, which is less likely to break under stress compared to plastic. Also, its knee joints contain artificial ligaments and a patella to better imitate the real thing. These are just some of the details considered in its construction, which far surpasses the work done on the upper-torso Eccerobot cyclops, whose creators claimed it to be the world's most anatomically accurate robot a few years ago.
As you'll see in the following video, programming all of those muscles to work in tandem is proving a difficult task – a bit like playing QWOP multiplied by about a hundred. The robot is able to perform relatively simple tasks, like bending its arms and legs, but more complex actions such as walking remain primitive. However, the team has made significant strides over the years, and with Kenshiro they continue to push the limits of musculoskeletal robots further.
Source: Tokyo University JSK Lab via IEEE Spectrum


