


Imagine mobile sensor networks that run around, jump and maneuver in the air to get the job done. That's what Jianguo Zhao is working towards; his design for such networks involves biologically-inspired sensors in the form of robots with little tails. These "tailbots" are expected to have applications in areas ranging from search and rescue to surveillance and environmental monitoring.
The wireless sensors typically used to create a mobile sensor network are often deployed manually or are equipped with wheels. That only gives them a little mobility; sensors are limited in number and even the wheeled ones can get stuck or find it difficult to negotiate uneven terrain. Ideally a mobile sensor network should be easy to deploy, enable communications, and maintain connectivity even in difficult terrain.
Thinking about giving sensors the ability to move in the same way that small animals do led the researchers to create the tailbot (not to be confused with the Tailbot currently under development at the University of California, Berkeley). Zhao, a PhD student under the supervision of Professor Ning Xi, Professor Matt W. Mutka and Professor Li Xiao at Michigan State University, with the help from an undergraduate student Tianyu Zhao, took about a year to create the prototype, that can jump like a frog and maneuver like a lizard. He says the idea of giving the robot a tail was sparked by biological studies about how lizards use their tail to perform acrobatics.
"The tail can help the robot transit from run to jump, or from jump to run," says Zhao."It can make the robot stand up for jumping and also lie down for running. In mid-air, the tail is used to control the robot's body angle to ensure a safe landing posture. We believe this is a major step towards next generation miniature agile multi-modal locomotion robots."
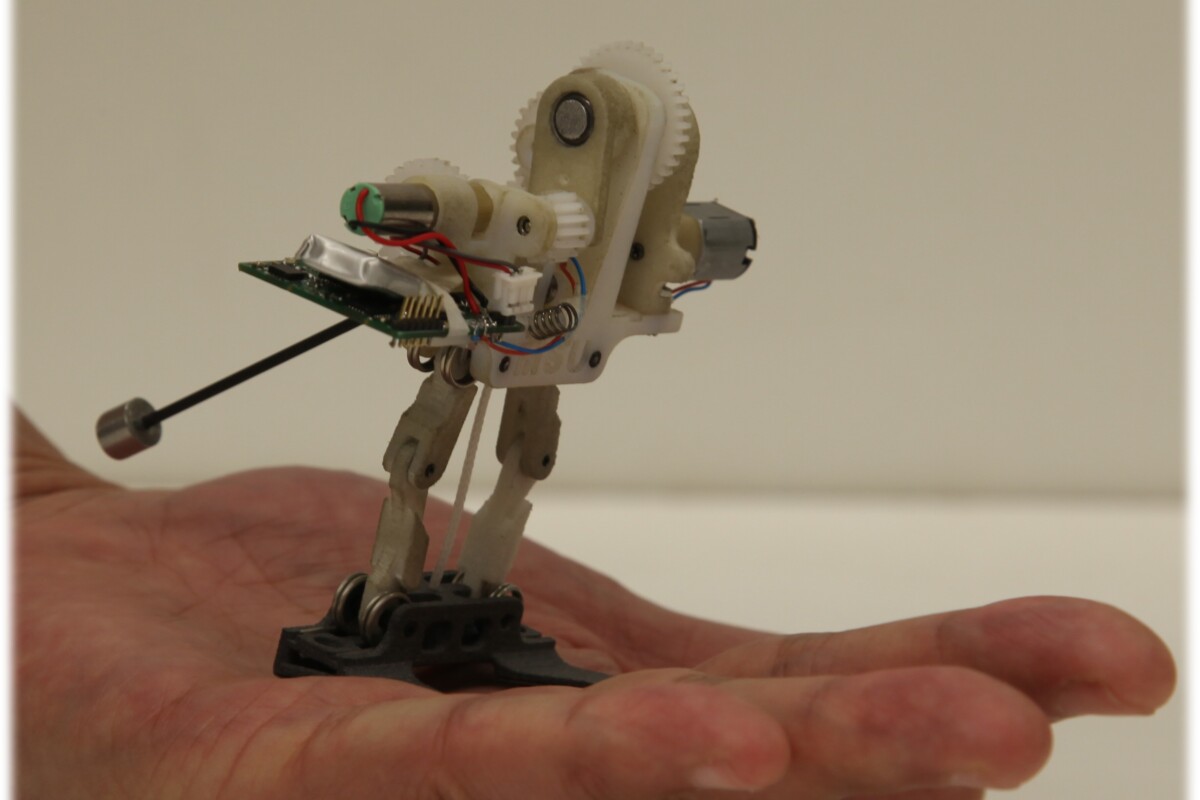
Each tailbot can be easily made with the help of a 3D printer, and can run on flat ground with little wheels at speeds of 3.66 cm (1.4 in) per second. When it encounters an obstacle, it leaps into the air, swinging the tail mid-flight to control its body angle. Standing about 7.5 cm (2.9 in) tall and weighing around 26.5 g (0.9 oz), the tailbot can jump to a height of approximately 82 cm (32 in) – about 10 times its body size – with a 75-degree take-off angle. Even with an 8 g (o.2 oz) payload, the bot can still jump to a height of 69.5 cm (27 in).
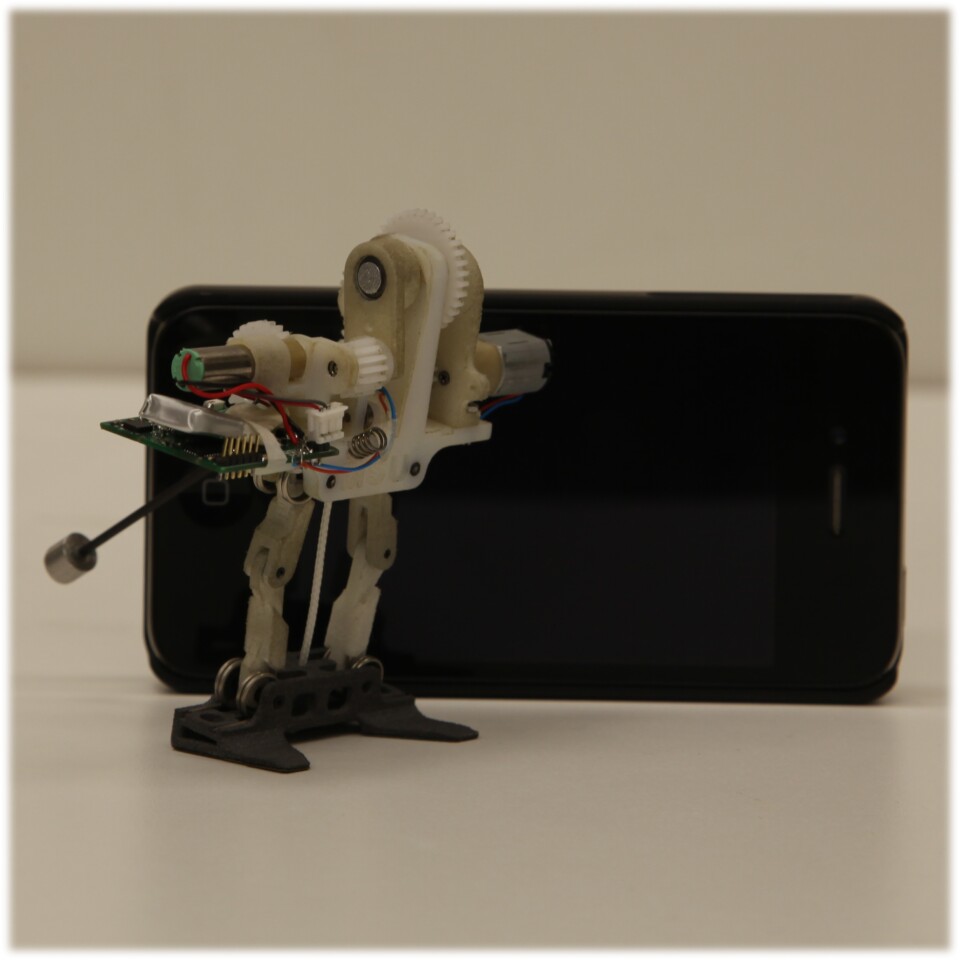
Equipped with wireless communication abilities, controls, sensing mechanisms and an on-board power source, each tailbot can operate autonomously. They can also carry more sensors as payloads. That's quite a lot to pack into a robot that can fit in the palm of your hand.
Zhao states that the challenge lay in designing a robot that could run, jump and steer in mid-air. "You need to incorporate all the mechanical, electrical, and energy parts into such a tiny package," Zhao told Gizmag. "Yet with the multiple functions we want to achieve, we need to reduce the weight of the robot so that it can jump higher."
It's important to keep the tailbots small so that the costs stay low, allowing for easy mass production. Its tiny stature also reduces the landing impact force post-jump, so there's less potential for damage. Zhao is working on getting the tailbots to talk to each other wirelessly and expanding their sensing abilities (for humidity, temperature, GPS, etc), with a central processing system receiving the gathered information.The goal is to create a truly robust sensor network, where the sensors can run around or jump over obstacles in natural environments or at disaster sites, and transmit data reliably.
"If there's an earthquake we could aerially deploy, or a first responder could manually release, for example, 100 tailbots," Zhao tells us."These robots can jump around and detect where the survivors are and send the location to the central processor. Many such robots are better than a single large robot."
According to Zhao, a single sensor network could contain an infinite number of tailbots. He is also collaborating with the Computer Science Department at the university to figure out communication protocols that will let the tailbots talk to each other efficiently in mid-air, since their communication range varies based on where they are.
"Given two robots, if one robot jumps up to one meter in the air while the other stays on the ground, the communication range will be six times larger than when both robots are on the ground," says Zhao. Future versions of the tailbot are being developed at the Robotics and Automation Lab, directed by Professor Ning Xi. Plans to conduct field experiments at disaster sites are in the works.
Check out a video of the tailbot below
Source: Michigan State University


