



Although Honda's ASIMO has been running around at speeds of up to 6 km/h (3.7 mph) since 2004, his style is more of a fast sneak than a true running action. Getting bipedal robot like ASIMO to run like a human is no easy feat - as C-3PO is sure to attest - but researchers in a University of Michigan (U-M) lab have done just that with a bipedal robot called MABEL. The researchers believe that MABEL, which can reach a peak pace of 10.9 km/h (6.8 mph), is the world's fastest bipedal robot with knees.
Built in 2008 by U-M professor Jessy Grizzle working in collaboration with U-M doctoral students Koushil Sreenath and Hae-Won Park and then doctoral student at the Robotics Institute at Carnegie Mellon University, Jonathan Hurst, MABEL started out walking over flat surfaces before moving onto uneven ground. The researchers spent years progressively improving the feedback algorithms that enable MABEL to keep its balance while reacting to its environment in real time and in July of this year the robot took its first real jog.
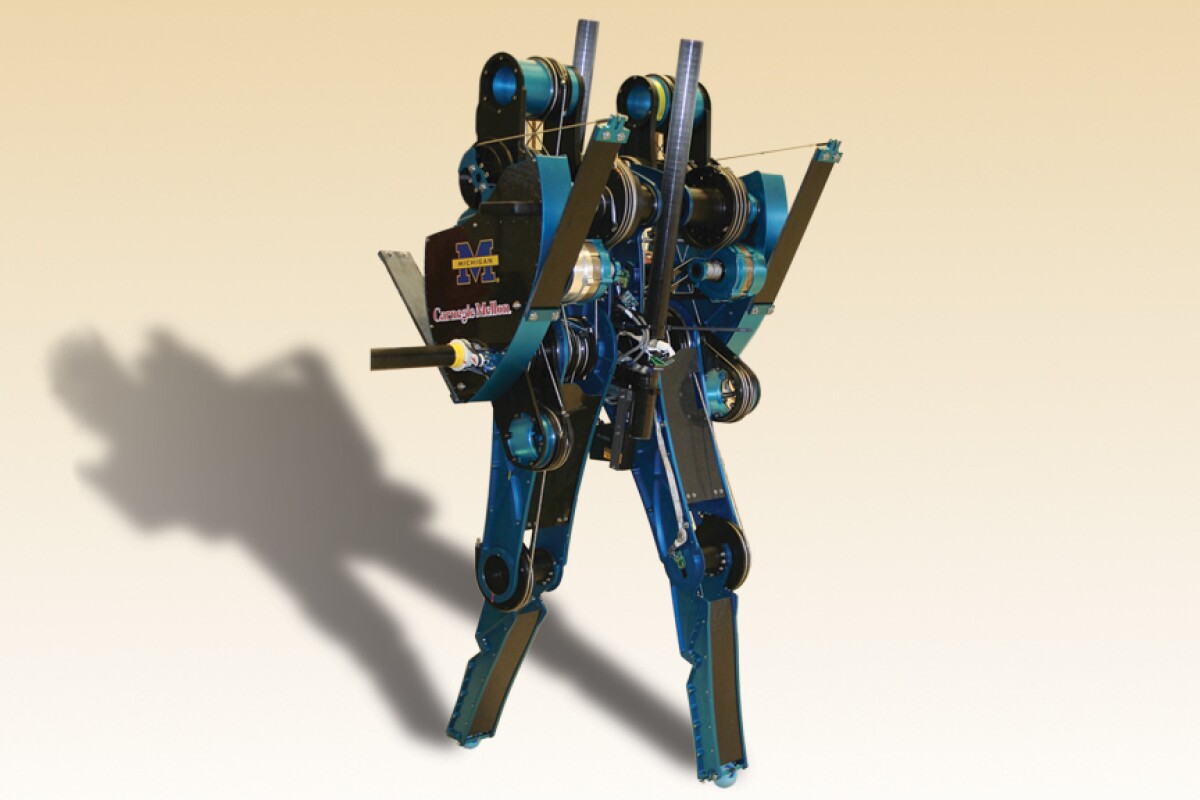
To enable MABEL's human-like gait, its weight is distributed like a person's, with a heavier torso and light, flexible legs with springs that act as tendons. The researchers say that other running robots, such as ASIMO, are almost speed walking and their so-called flight phase when both feet are off the ground lasts less than 10 percent of each step. In contrast, MABEL is in the air for 40 percent of each stride.

"We envision some extraordinary potential applications for legged robot research: exoskeletons that enable wheelchair-bound people to walk again or that give rescuers super-human abilities, and powered prosthetic limbs that behave like their biological counterparts," said Hurst, who is now an assistant professor in the Department of Mechanical, Industrial and Manufacturing Engineering at Oregon State University.
With an estimated ground clearance of 7.6 - 10 cm (3-4 inches) at a speed of 7.2 km/h (4.5 mph), the researchers claim MABEL is better able to deal with uneven ground, travel inside places built for humans and clear obstacles more effectively than other running bipedal robots. The engineers say two-legged robots with running ability like MABEL's could one day serve as robotic soldiers or rescuers.
"Imagine a future where you don't have to first clear a path and build roads before a vehicle could move around," Sreenath said, "but rather, we have a class of running machines like animals that could transport you around with no roads, but with a smooth and efficient ride."
Video of MABEL in action can be seen below. Additional videos are available from the MABEL project page here.


