









Parkour is all about hurling yourself quickly and efficiently past whatever obstacles are in your path while maintaining as much momentum as possible. It's a challenge for humans, so how would robots fare? In an effort to push the boundaries of robotic agility, researchers at the University of Pennsylvania decided to find out by teaching their RHex robot some Parkour moves.
RHex is designed to be an all-terrain walking robot that can deal with curbs, stairs, puddles, rubble, sinkholes, and other obstacles to accomplish rescue missions or carry out sensor surveys in inhospitable areas. While the RHex has been around for over a decade, a modified version called XRL (X-RHex-Light) is now being taught some new tricks by UPenn's Professor Daniel Koditschek.
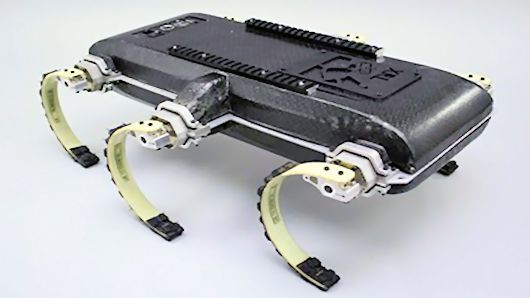
XRL differs from its earlier relatives by using lighter materials and simpler fabrication methods. A complete shell of carbon fiber panels surrounds the XRL frame, and it has only a single battery compartment. The XRL is 51 cm (20 in) long, 40.5 cm (16 in) wide, and the body alone is 10 cm (four inches) in thickness. The diameter of the six flexible rotating legs is 17.5 cm (6.9 in), giving the XRL ground clearance of 11 cm (4.3 in) regardless of which end is up at the moment. It's weight including battery pack is 6.7 kg (14.7 lb).
For motive power, the XRL depends on six 50 watt brushless pancake electric motors by Maxon (one for each leg). The actual peak power for these motors is about 380 watts, or about half a horsepower. These motors are geared down by a factor of either 18:1 or 23:1, depending on the nature of the landscape on which it is being tested. Powered derives from a ten-cell lithium polymer battery with a capacity of 83 W-hr at 37 volts. Battery weight is about 0.6 kg (1.3 lb).
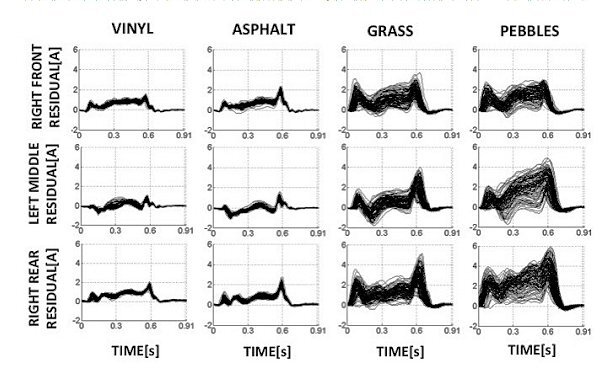
The XRL legs are equipped with force and power sensors, which allow the work of maneuvering to be analyzed in detail. Among other benefits, the research team found that the response of the legs can be used to give an indication of on what sort of surface the XRL is walking. For example, the XRL responds to vinyl and asphalt surfaces in very much the same manner, but responds very differently to pebbles or grass surfaces (which are in turn similar to each other).
In addition to this sort of tactile feedback from the legs, the XRL is equipped with a laser scanner to obtain the same sort of feedback that a simple vision analysis system would provide, as well as an inertial navigation sensor and additional tactile sensors. These allow the XRL to maneuver through a simple (although challenging) landscape. Essentially, the XRL is limited to working with one extreme landscape feature at a time. All other maneuvering is the result of the stable balance inherent in the XRL design.
“What we want is a robot that can go anywhere, even over terrain that might be broken and uneven,” said graduate student Aaron Johnson. “These latest jumps greatly expand the range of what this machine is capable of, as it can now jump onto or across obstacles that are bigger than it is.”
The XRL certainly puts-on an impressive demonstration of jumping, clinging and cavorting over the urban landscape, as you will see on the video below.
Source: University of Pennsylvania


