


Whether they look like a thermos or a bracelet, today's drones come in all shapes and sizes, but they all involve a bunch of moving parts to keep them balanced in the air. Swiss researchers have now fashioned a drone that remains airborne through a single propellor, resulting in what they describe as the mechanically simplest controllable flying machine in existence.
Researchers at ETH Zurich's Flying Machine Arena spend their days picking apart drone design and what tasks they might be able to perform. Part of this involves investigating how swarms of small drones can collaborate to build things, work which culminated in a walkable rope bridge built entirely by flying robots last year.
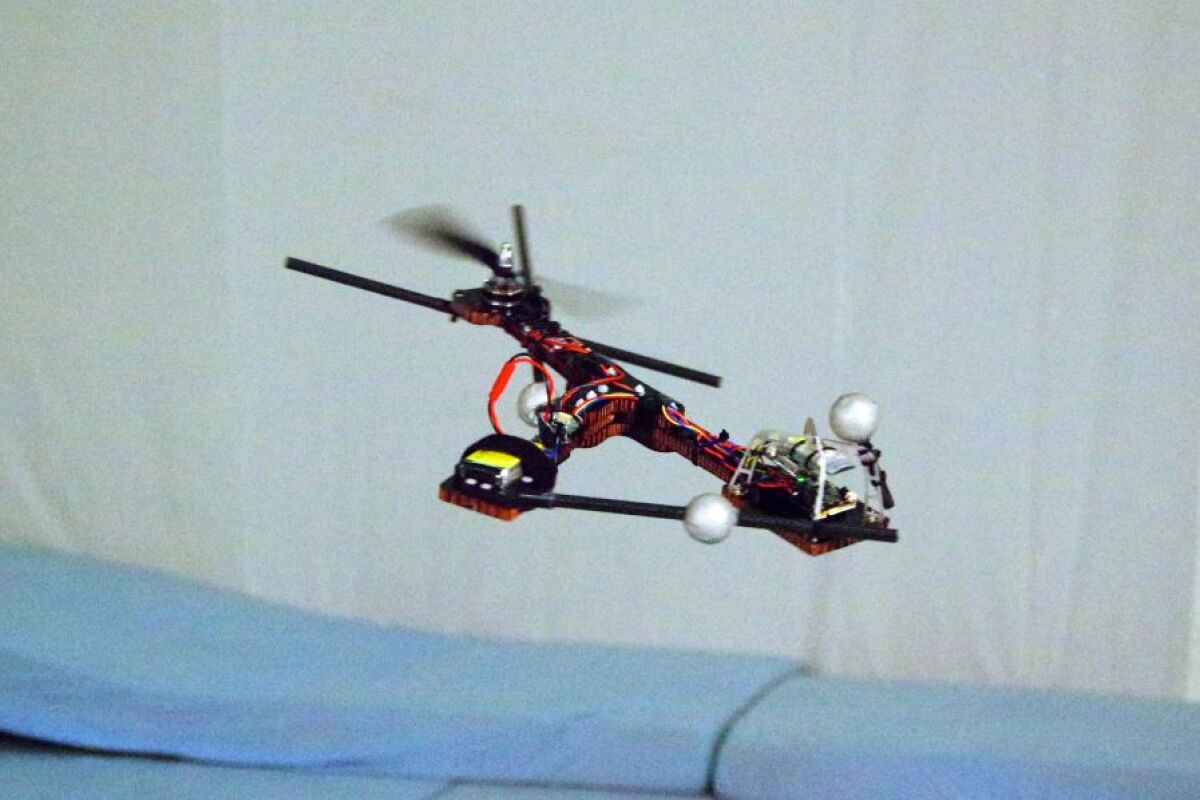
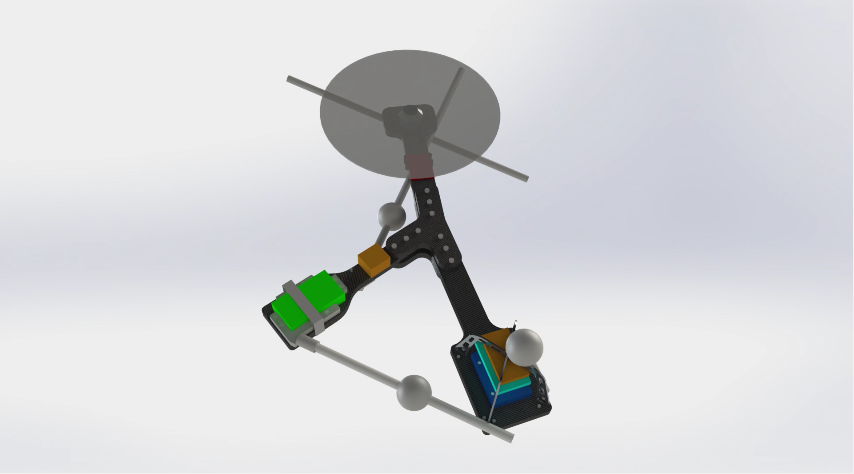
The Monospinner is their latest creation and the drone doesn't seem to serve much of a practical purpose, unless you're looking to film a very fast merry-go-round or deliver whipped cream. Where conventional multicopters hover in place through a number of rotors that create an upward thrust to cancel out their weight, the Monospinner relies on just one.
The engine driving the propellor at the top is the drone's only moving part. By having the vehicle rotate about four times each second at a constant angular velocity with a certain propellor force, the Monospinner is able hold its position in the air and stop from flipping over.
To move the drone in the air, the team uses the average thrust force of the propellor and deviations from this average thrust as control inputs. This allows it to determine its position, even after it has been tossed into the air like a frisbee (see the video below).
Having previously demonstrated that quadcopters can remain in the air even when losing one, two or three of their propellors, the Monospinner almost seemed like a logical step for the research team. It says it is now seeking to take things one step further and build a flying machine with no moving parts at all.
A video demonstrating the Monospinner can be seen below, while a paper detailing the research can be found here (PDF).
Source: ETH Zurich Flying Machine Arena via RoboHub


