

The classic image of a robot is rigid and metallic, but if they're ever going to work alongside humans in the real world, they're going to need a softer touch. Harvard researchers have developed a new method for producing small-scale squishy robots, and demonstrated it by creating a flexible robotic peacock spider, driven by a microfluidics system.
This little spider isn't the first animal-shaped soft robot to be created – it's not even the first one with eight legs. Two years ago, some of the same Harvard researchers showed off Octobot, a chemically-powered soft robot inspired by an octopus. The new spider bot is a clear progression of that project, shrunk down to the millimeter scale.
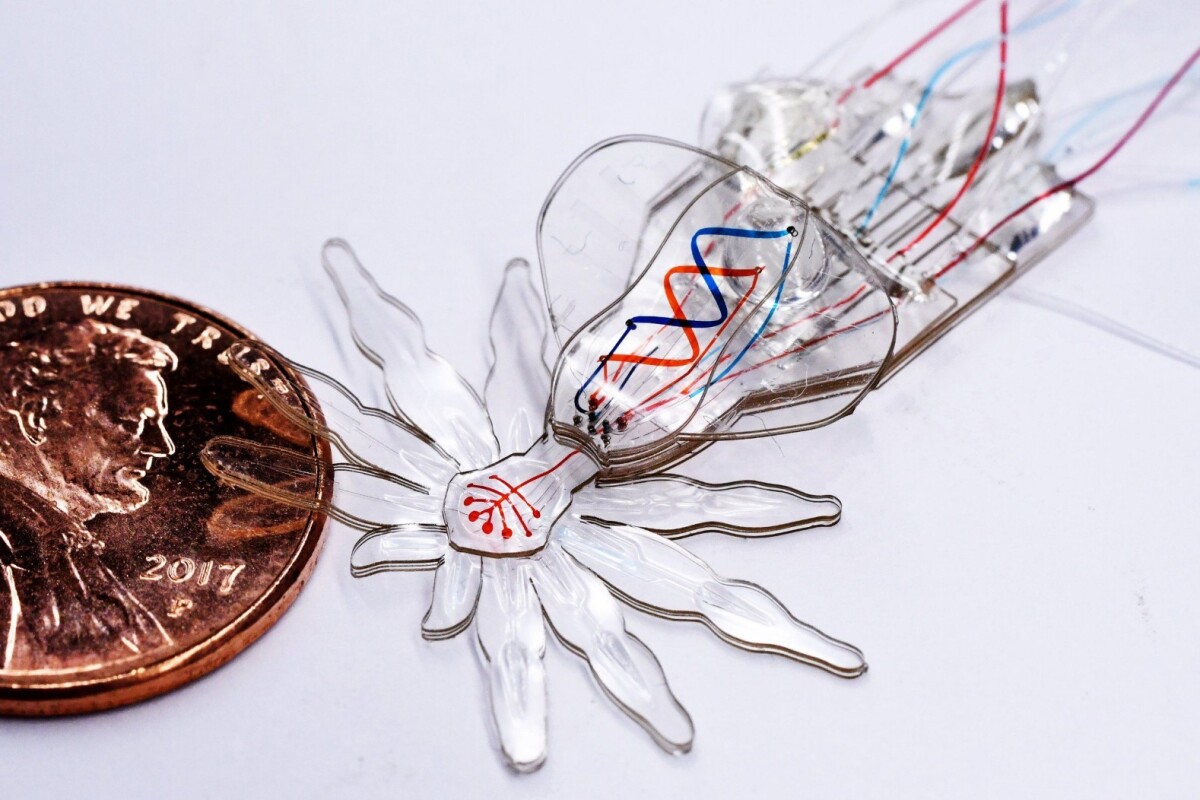
With no rigid parts, the soft spider gets its movement, appearance and abilities from microfluidics. Inside its body is a system of thin, hollow tubes through which specialty liquids are pumped, to actuate its limbs, change its color or set more permanent features.
"The smallest soft robotic systems still tend to be very simple, with usually only one degree of freedom, which means that they can only actuate one particular change in shape or type of movement," says Sheila Russo, co-author of the study. "By developing a new hybrid technology that merges three different fabrication techniques, we created a soft robotic spider made only of silicone rubber with 18 degrees of freedom, encompassing changes in structure, motion, and color, and with tiny features in the micrometer range."
But the soft spider is mostly an end to show off the means. The researchers developed a new method to make these devices, which they call Microfluidic Origami for Reconfigurable Pneumatic/Hydraulic (MORPH) devices. The body is made out of nothing but an elastic silicone, compiled of 12 thin layers that are etched out using a laser and then bonded together to give the robot its 3D structure.
To reach its final shape, some of these microfluidic channels are pressurized by way of a curable resin. When this is hit with UV light from the outside, the resin hardens and bends the softer layers into the desired shape, permanently. For example, the team bent the spider's legs downwards and puffed up its abdomen, to give it a bit more depth.
Other tubes are then filled with colored fluids to brighten up the spider's eyes and give it a more colorful abdomen pattern, like the peacock spider that inspired it. Pumping liquids into channels in its legs can also make it "walk" – or at least look like it's walking.
While the current robot itself doesn't look like it's ready for any practical purpose, the team says that it's more of a proof-of-concept for the MORPH method of production.
"The MORPH approach could open up the field of soft robotics to researchers who are more focused on medical applications where the smaller sizes and flexibility of these robots could enable an entirely new approach to endoscopy and microsurgery," says Donald Ingber, Founding Director of the Wyss Institute at Harvard.
The research was published in the journal Advanced Materials. The team demonstrates the soft spider in the video below.
Source: Wyss Institute


