






Swarms of small, intercommunicating robots are now being eyed up for all sorts of potential uses, including the creation of communications networks for disaster relief, mapping out hazardous environments, or even perhaps helping with the colonization of Mars. Since 2007, a group of European research groups have been collaborating on the now-completed Swarmanoid project, in which a variety of purpose-specific mini robots where programmed to cooperate in order to accomplish a task. Although the bots have been perfecting their book-stealing routine since 2009, a video depicting the task won the Best Video award at last week's 2011 Artificial Intelligence Conference in San Francisco, and was many peoples' introduction to Swarmanoid.
The robots involved in the task included several Hand-Bots, Foot-Bots and Eye-Bots.
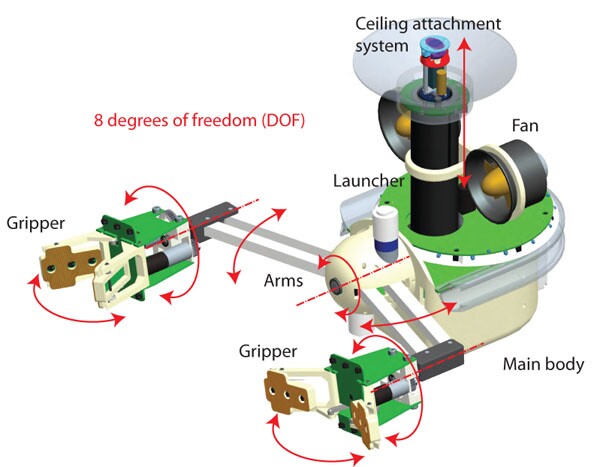
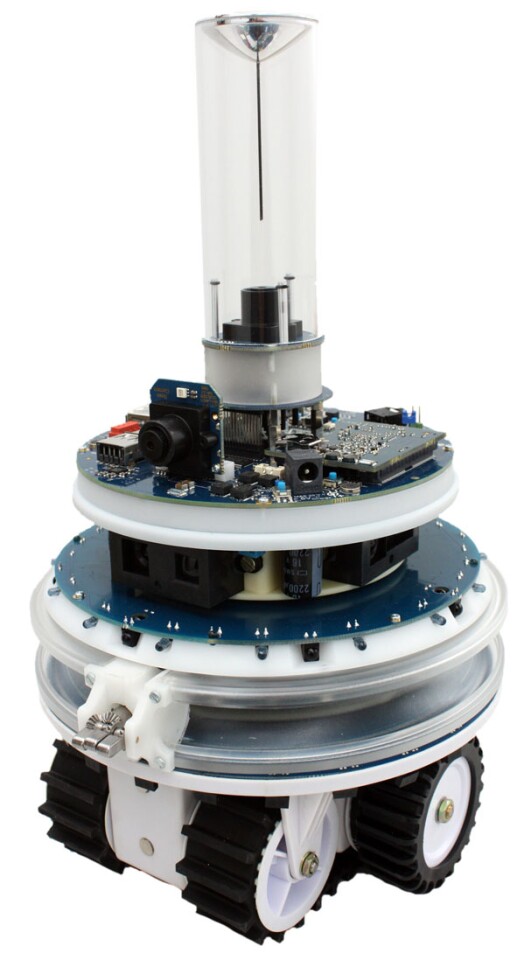
The Hand-Bots are capable of climbing up vertical surfaces, using their two mechanical arms and grippers. They are assisted in doing so by a magnetic grappling hook, that shoots out of their top and attaches to the ceiling - using a line attached to that hook, they can then winch themselves up. They also have a couple of ducted fans, that they use to spin themselves around when hanging from their grappling line.
The Foot-Bots can move across the floor on wheels, and feature side grippers that they use for grasping other objects. They have dual cameras and 360-degree infrared sensors, for finding their way around.
Finally, there are the Eye-Bots. These camera-equipped quadracopters are able to search for specific objects, and are capable of attaching themselves to overhead surfaces. They also feature infrared distance sensors and sonar.

The process starts with a group of Eye-Bots flying through a building, each one stopping to hook itself onto the ceiling at various points along their journey. When one of them spies the book in a bookcase, it relays that information back along the line of other parked Eye-Bots, which have formed a connected network. This signal ultimately reaches the deployment area, where the Hand-Bots and Foot-Bots are waiting.
Because the Hand-Bots cannot move across the ground on their own, one of them requests that the Foot-Bots pick it up, and move it to the bookcase. While two of them respond to that request, a number of others position themselves beneath the linked Eye-Bots, creating a ground-based path for the Hand-Bot-carrying Foot-Bots to follow.
Once deposited at the bookcase, the Hand-Bot uses it arms, grippers, grappling hook and fans to climb up the edge of the bookcase, grab the book, then bring it back down. The Foot-Bots then pick it back up, along with its book, and return it to the deployment area. A second Hand-Bot has meanwhile been brought to the bookcase, should it be needed.
The Swarmanoid research project wrapped up last September, although the lessons learned through it could be applied to scenarios such as search-and-rescue missions, or the replacement of human workers in dangerous locations.
The proof-of-concept book-stealing caper can be viewed below.
Source: IEEE Spectrum


