
One of the challenges of minimally invasive laparoscopic surgery lies in getting surgical instruments into the patient's body via a narrow catheter. Scientists have set about addressing that problem, with magnetic instruments that pop into and out of shape as needed.
The experimental MaSoChain (magnetic soft-robotic chain) system was developed at Switzerland's ETH Zurich research institute, by a team led by doctoral student Hongri Gu. He is now a postdoc at the University of Konstanz.
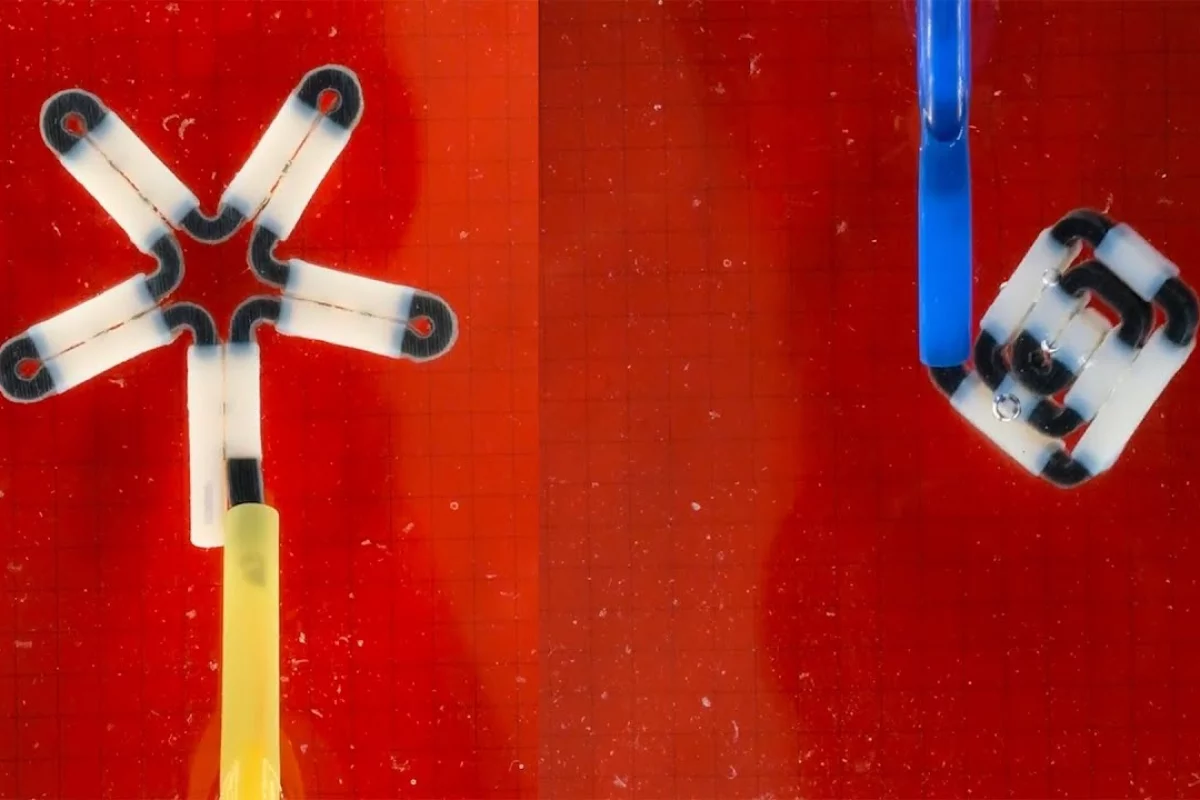
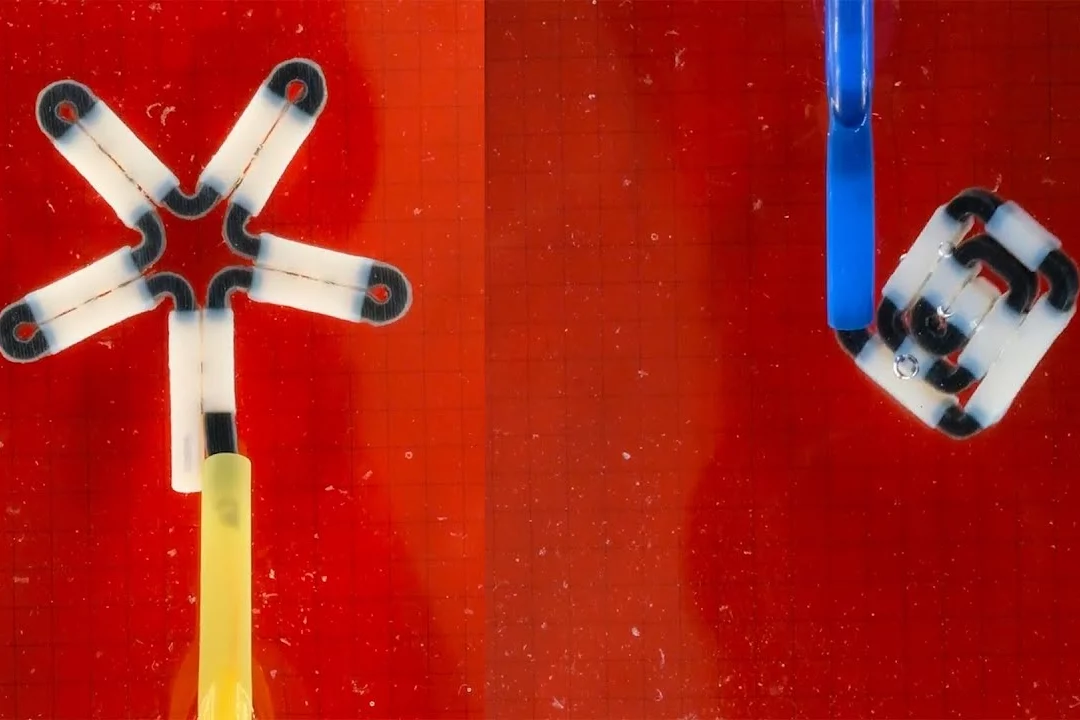
In a nutshell, MaSoChain incorporates 3D-printed surgical instruments made up of small rigid polymer segments linked by flexible elastic connectors. Each segment has a tiny strategically placed magnet inside. When inserted into a catheter, the components all sit end-to-end in a row, "like a string of pearls."
As the instrument is pushed out of the end of the catheter, its magnets are drawn to one another, causing it to take on the desired shape (which is wider than the catheter). Among other things, the technology has so far been used to create a grasper that can grab and move items within the body, and a three-piece steerable endoscopic camera.
In all cases, once the surgical task is complete, the instrument's components revert to their narrow string-of-pearls configuration as they're pulled back out through the catheter. The whole setup can then be sterilized and reused.
The research is described in a paper that was recently published in the journal Nature Communications. You can see the MaSoChain system in morphing action, in the video below.
Source: ETH Zurich


