



The swiftlet may not look much different than other little birds, but it has one unique ability – it builds its nest out of its own saliva. Inspired by the swiftlet, scientists at Imperial College London's Aerial Robotics Lab have created a robotic quadcopter that can extrude polyurethane foam while in flight. By targeting where that foam goes, it can build up simple structures, essentially becoming a flying 3D printer. The technology could have some very important applications.
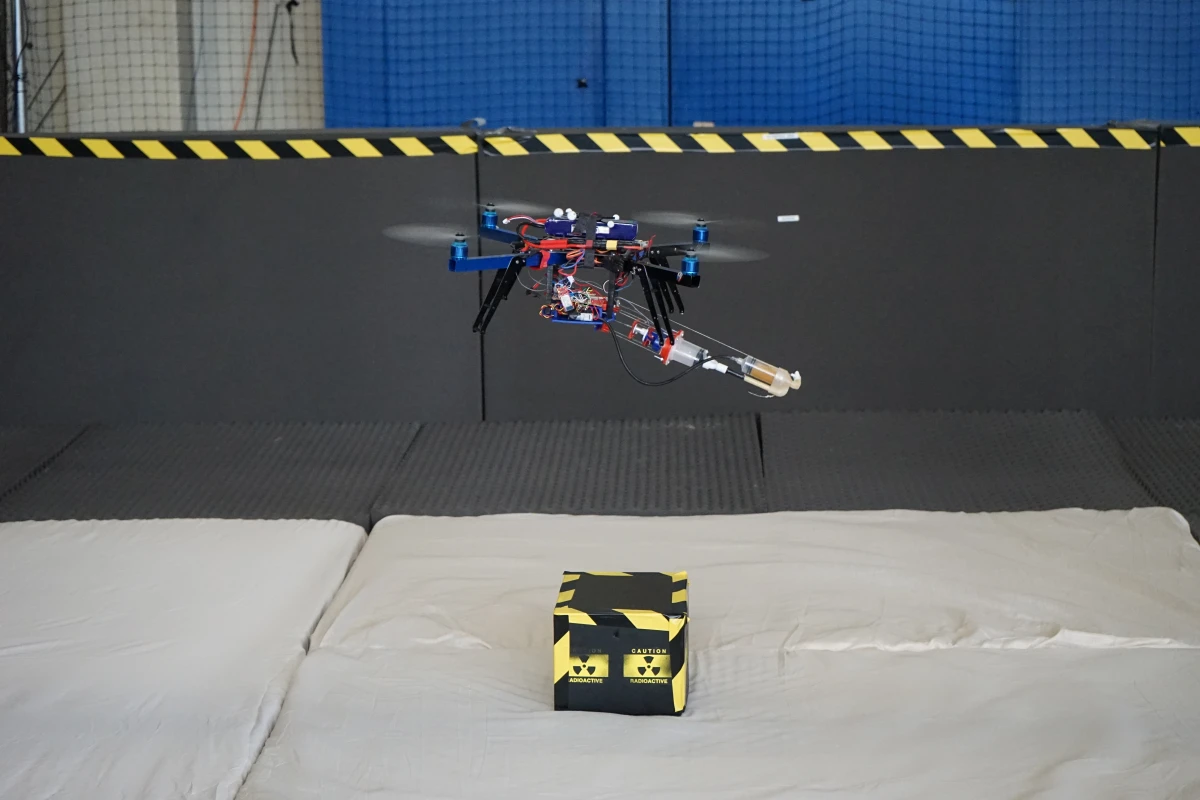
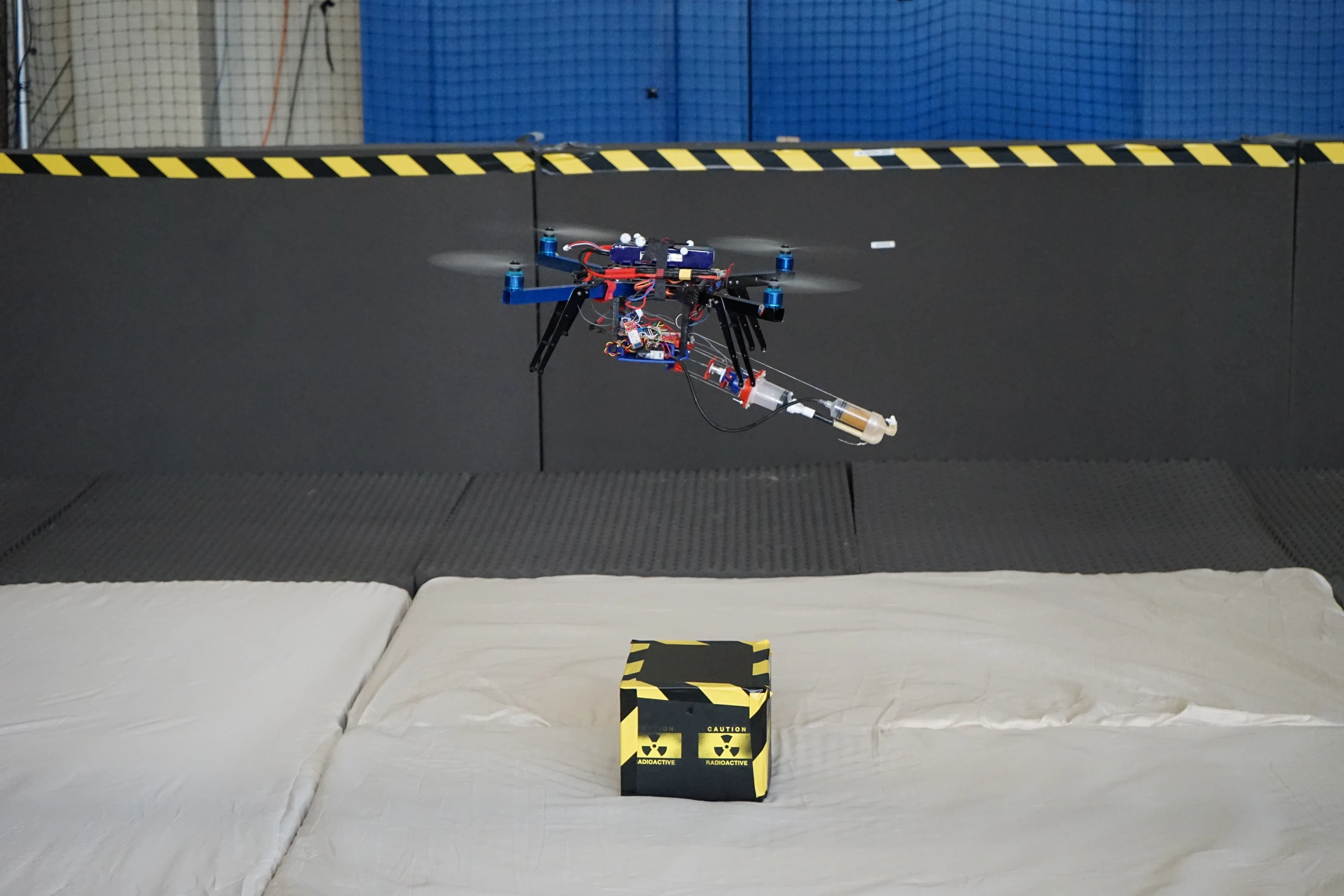
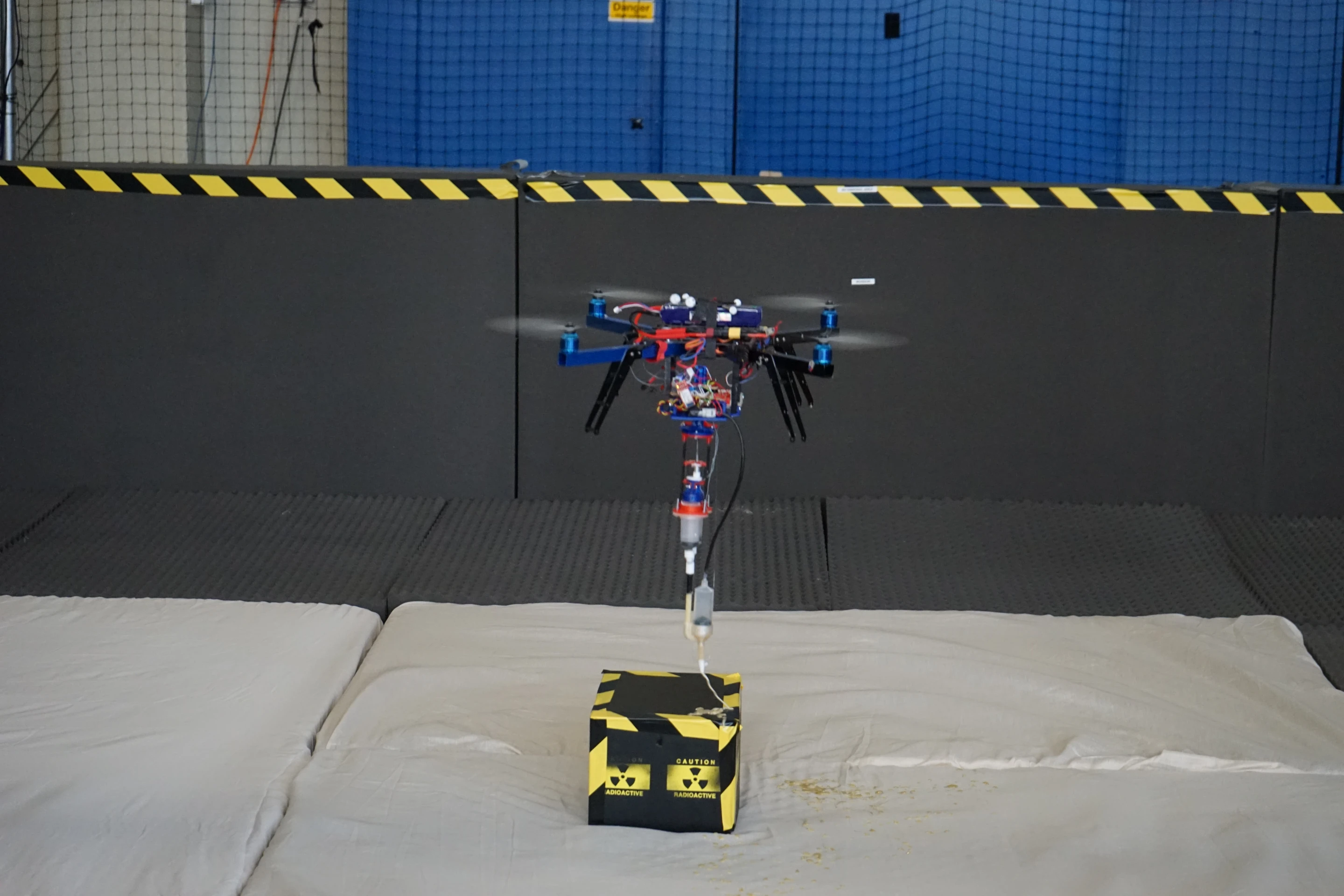
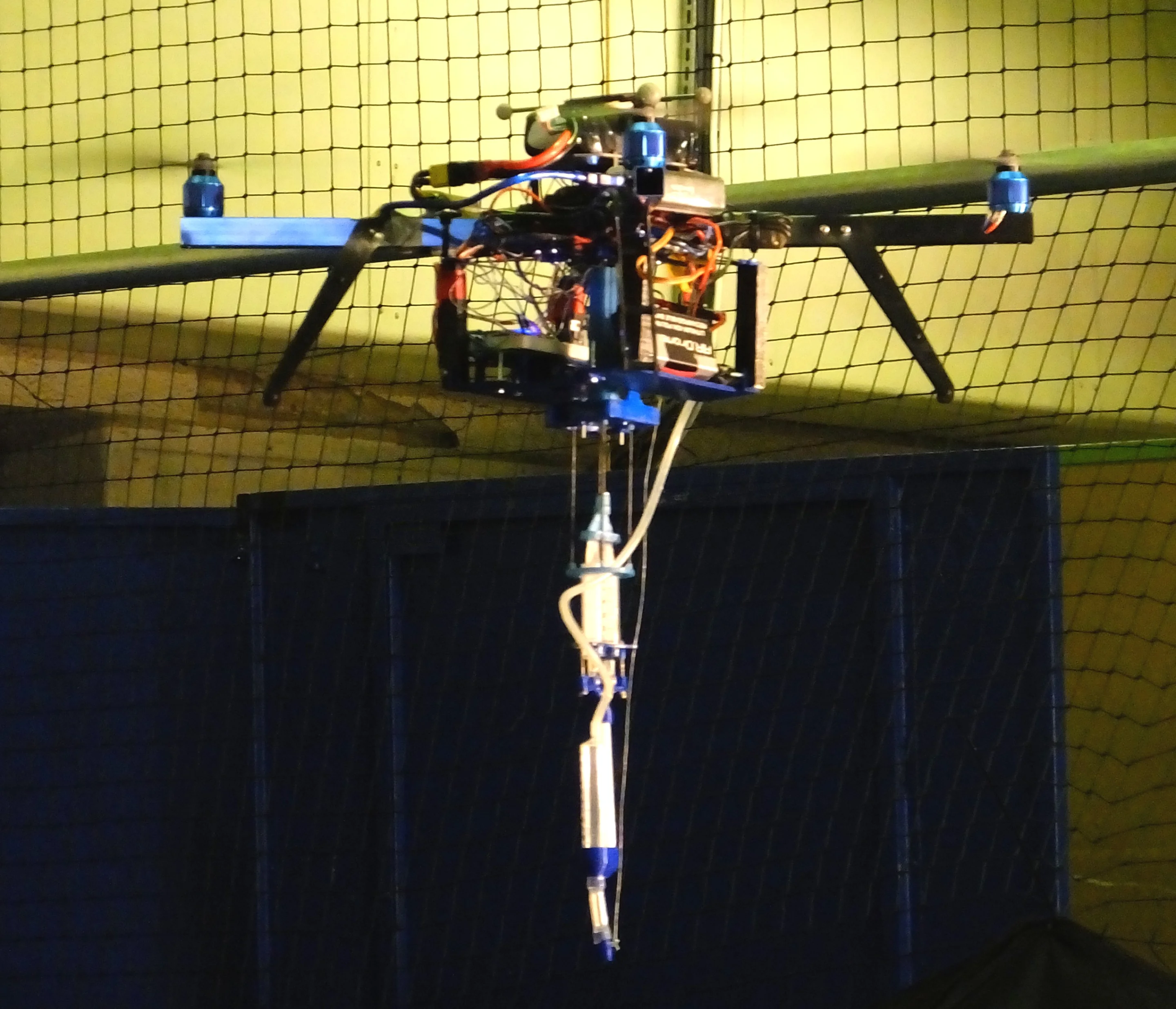
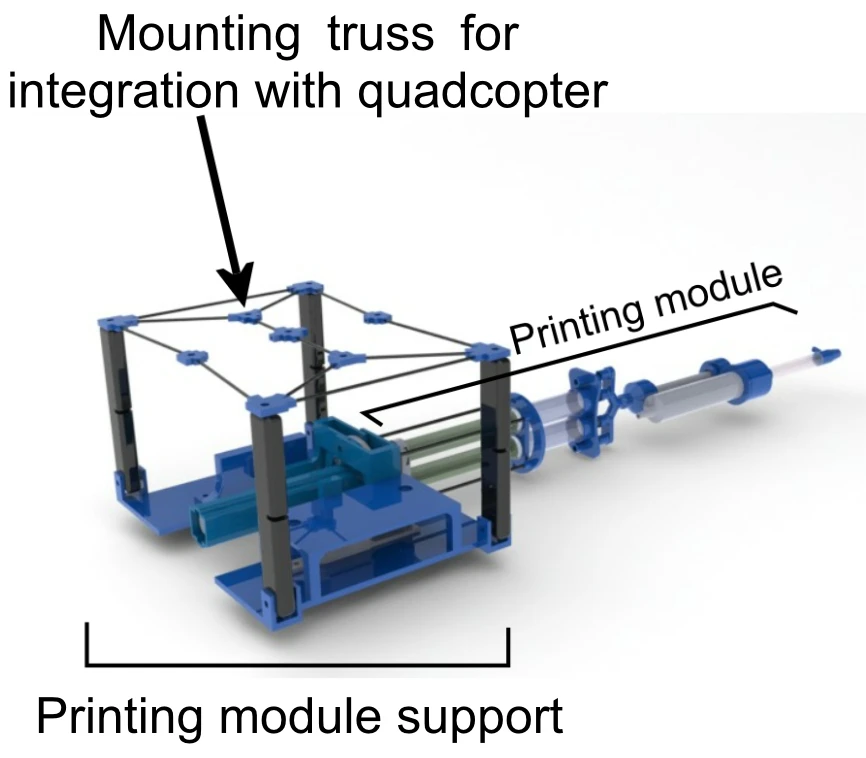
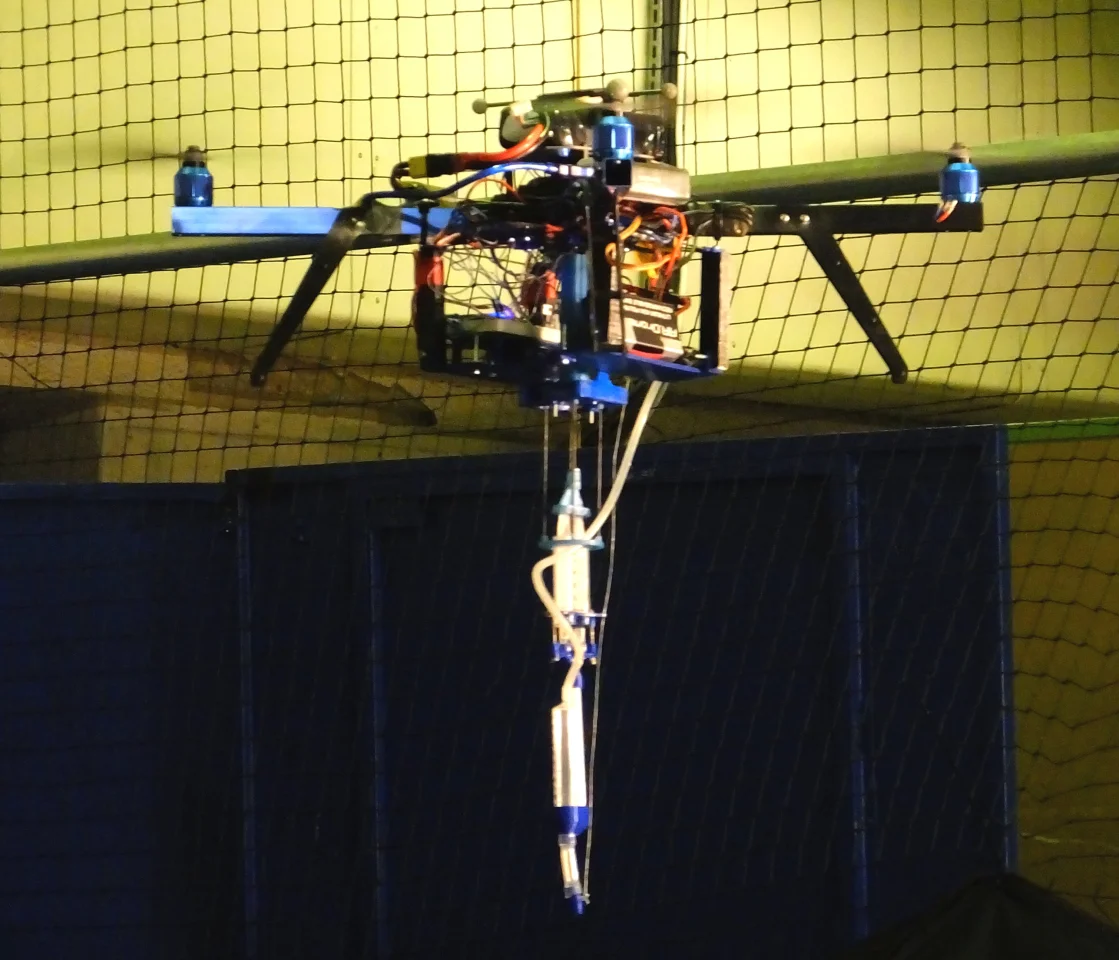
Developed mainly by Graham Hunt and other members of a team led by Dr. Mirko Kovac, the robot's platform is made from inexpensive 3D-printed components and carbon fiber supports. It has two canisters containing separate liquid chemicals on its underside. When those chemicals mix together as they pass through its extrusion nozzle, a chemical reaction occurs and they turn to foam.
In its current form, the aircraft uses GPS and an external system of 16 infrared cameras to identify targets upon which to spray the foam, within an indoor lab. That sensor data is transmitted to a nearby laptop computer, that is able to compensate for the constantly-changing angle and mass of the copter's printing payload. Based on that processed data, the computer relays flight and extrusion commands back to the robot.
Down the road, however, Kovac's team hopes to create fully-autonomous UAVs equipped with their own high-speed cameras and 3D depth senors, that could function in a variety of chaotic, real-world conditions.
At that point, they could conceivably be used for applications such as performing repairs in areas too remote or dangerous for humans to easily access, such as wind turbines or nuclear reactors. They could also pick up and remove hazardous items such as bombs or radioactive waste – which is where the team's second robot comes into play.
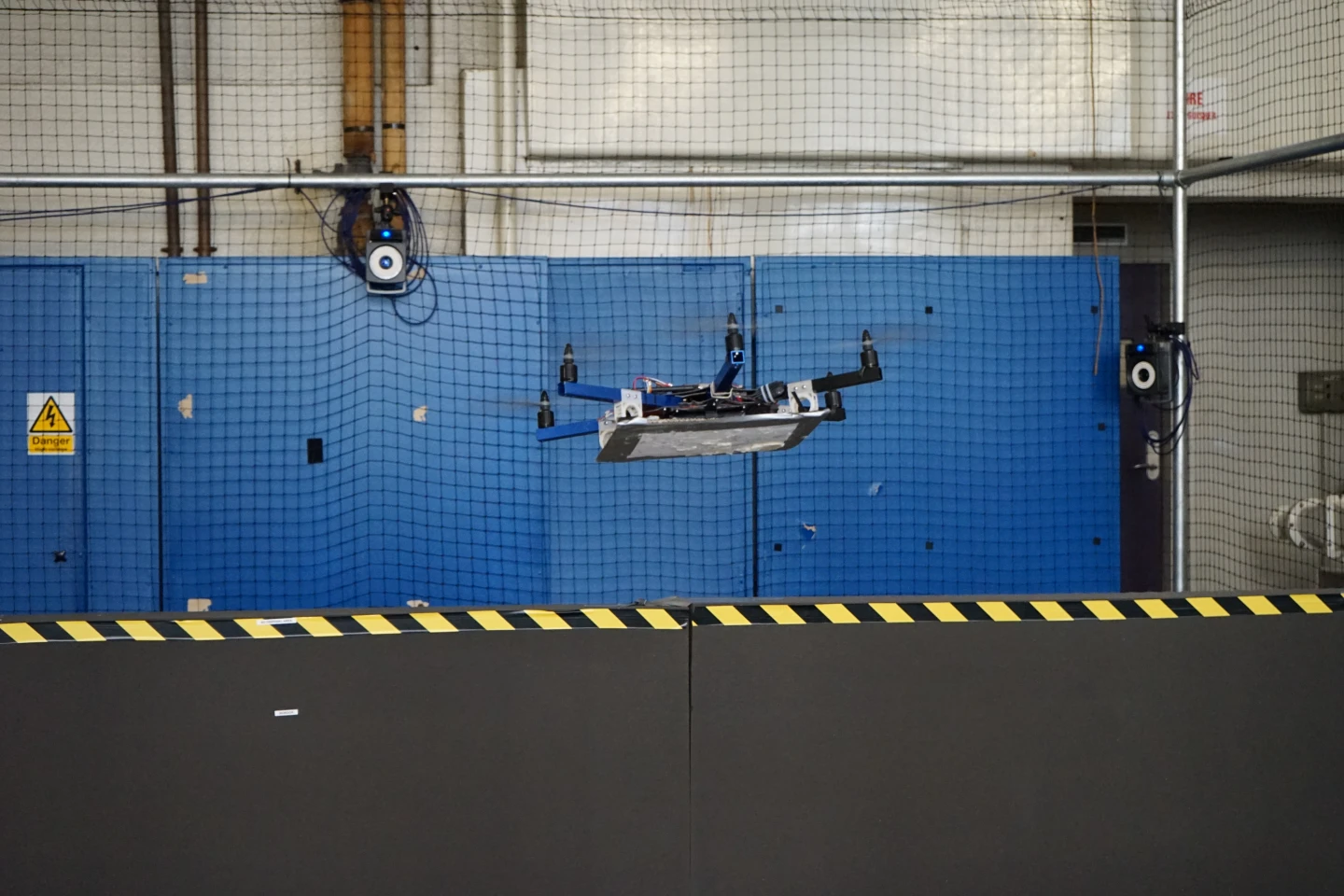
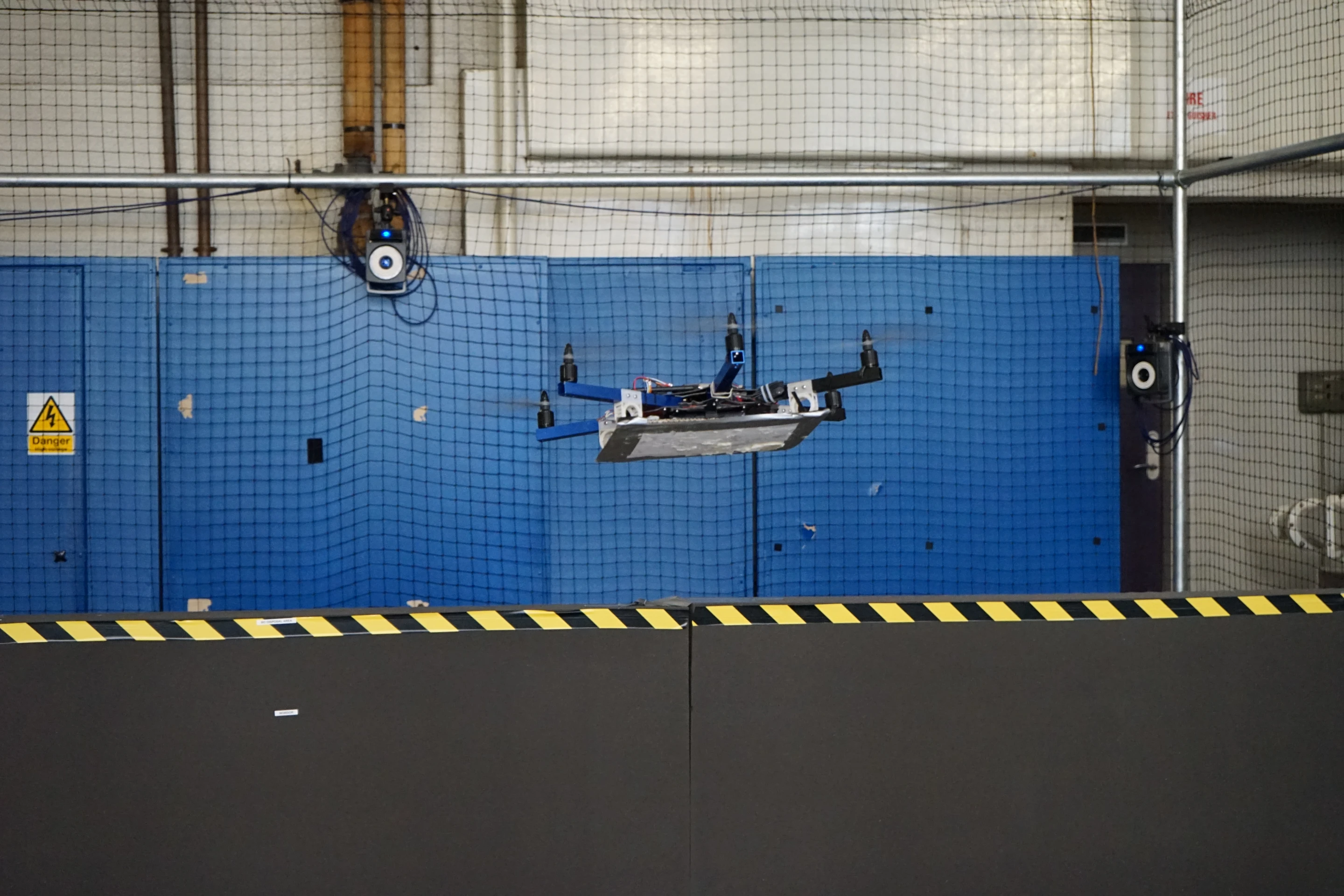
It's a hexacopter, and instead of an extrusion system, it just has a disposable flat surface on its underside. After the first robot (the quadcopter) sprays foam onto a target, the hexacopter simply lands on that target, waits for the wet foam to cure onto its underside, then flies away with the target adhered to it.
Kovac ultimately envisions a whole bio-inspired system, in which swarms of such "wild robots" will autonomously build platforms that they could use as a base of operations, and where they could also recharge their fuel cells via built-in solar cells.
"Like in nature, the robots will have specialized functions and division of labor," he explains. "Using swarm intelligence, the robots will be able to perform very complex tasks of autonomous inspection and aerial construction effectively. For example, inspection drones will create a 3D scan to detect damage in hazardous environments and a second swarm of construction drones will selectively repair the structure with aerial 3D printing."
The quadcopter robot will be on display this weekend at the college's Imperial Festival, while a paper on the research will be presented later this month at the International Conference on Robotics and Automation, in Hong Kong.
Source: Imperial College London via New Scientist





