


If you're a fan of insect-inspired robots, then you probably like creations such as RoboBee, VelociRoACH, and Harvard University's HAMR. Should the latter's scurrying around not be enough for you, though, it can now move across the water, sinking itself and walking beneath the surface on command.
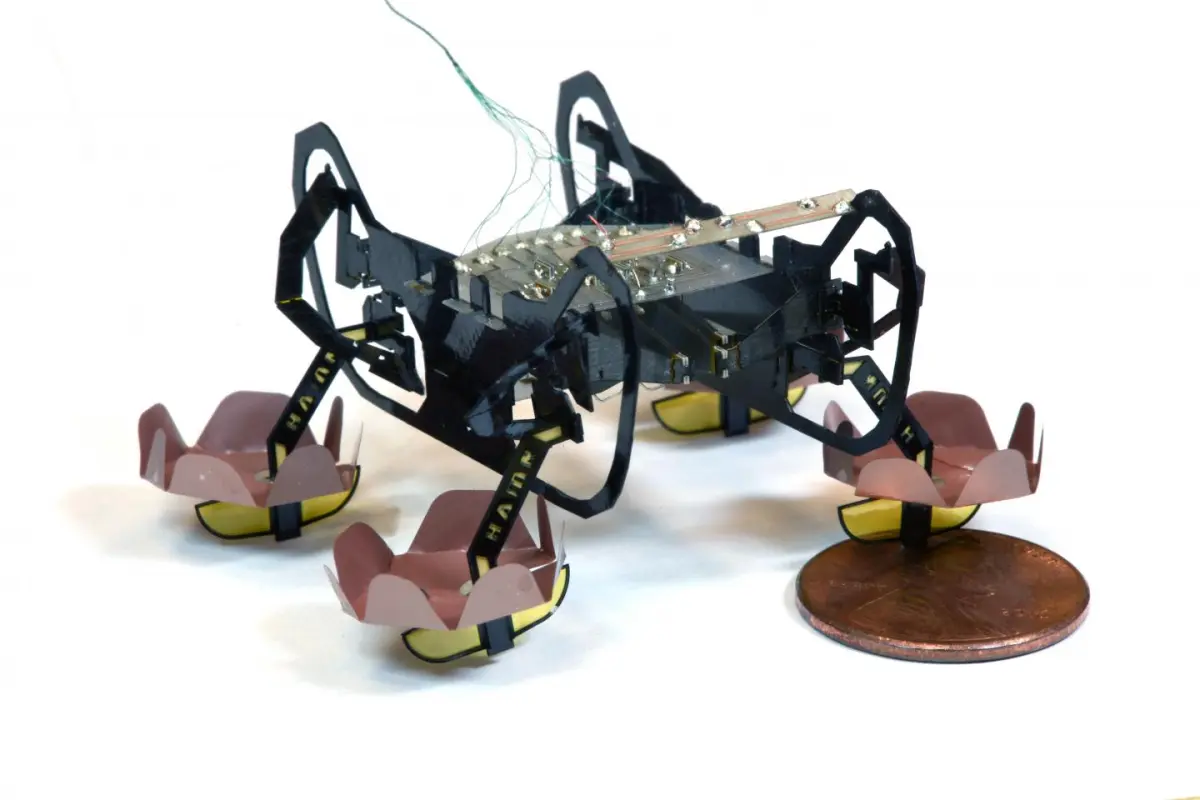
First announced in 2013, the original version of the tether-powered/controlled HAMR (Harvard Ambulatory MicroRobot) measures just 4.4 cm/1.7 inches in length, and can move along the ground at a maximum speed of 8.4 body lengths per second. Its construction was inspired by pop-up books, and involved sandwiching together 23 microscopic layers of material and then laser-cutting them into the desired patterns.
The latest version of HAMR weighs just 1.65 grams, and is equipped with foot pads on all four of its legs. These pads provide surface tension-induced buoyancy when the robot enters the water, keeping it from sinking (it can even carry a payload of 1.44 grams without going under). Using flaps on the underside of the pads, it subsequently makes its way across the surface, moving its legs in a swimming gait at a frequency of up to 10 Hertz.

If needed, however, HAMR can apply an electrical current to the water through the undersides of the pads. This results in a process known as electrowetting, in which the application of voltage reduces the contact angle between an object and the surface of the water. As a result, the surface tension is broken, and the robot sinks. It can subsequently walk along the bottom, using the same gait that it uses to walk on land. A watertight coating of a polymer called Parylene keeps it from shorting out while doing so.
When it's time to get out of the water, the tiny, light robot needs some help breaking back through the same surface that previously kept it afloat. To that end, the new amphibious version of HAMR has a stiffer transmission along with soft pads in its front legs, which together serve to increase its payload capacity and redistribute friction when it's climbing.
This alteration allows it to break through the surface, as long as it's climbing out of the water along a gently-sloping surface. Down the road, possibly utilizing technology such as gecko-inspired adhesives or jumping mechanisms, it is hoped that the robot will be able to leave the water without using a ramp.
The latest version of HAMR is described in a paper that was recently published in the journal Nature Communications, and can be seen in the action in the video below. And for another example of a water-walking insect-inspired robot, check out Seoul National University's robotic water strider.
Source: Harvard University





