


For such a reviled creature, the cockroach has some pretty impressive abilities. It can slide through incredibly narrow gaps, has great acceleration and can cling to overhanging surfaces like a gecko. But something you won't see them doing is launching more than a meter into the air – at least not in the natural world. But researchers have developed a new springing mechanism for small robots that enables them to jump many times their own height at just the right time, a technology they have demonstrated in their so-called JumpRoACH leaping milli-scale robot.
We have seen a number of robots inspired by the humble, loathsome cockroach over the years, including the speedy VelociRoACh, the DASH robot that can hang upside down and the CRAM robot that can compact its body and still move at high speeds. These examples were all developed at the University of California at Berkeley (UC Berkeley), and it looks like the school's robotic alumni is coming on in leaps and bounds.
Earlier this month, researchers from UC Berkeley demonstrated cockroach-inspired robots that can buddy up to climb stairs. In search of an even easier way for crawling bots to overcome obstacles in their path, they teamed up with researchers from Seoul National University to develop a spring system that allows them to jump to different heights.
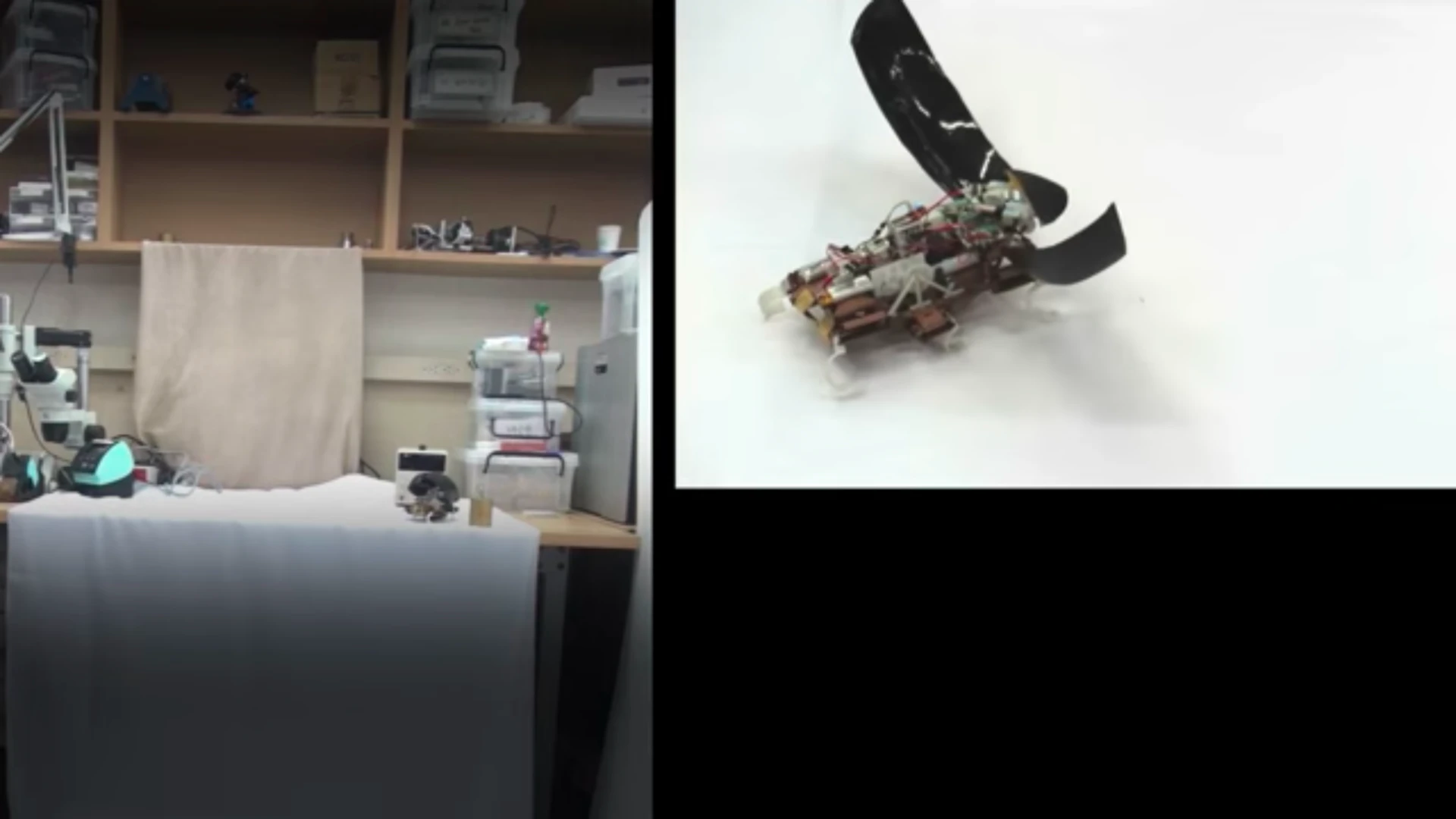
The mechanism is shaped like a diamond and has joints that bend like knees. Atop the diamond is a pulley system that is powered by gears and a DC motor to stretch eight latex bands. The system is able to wind up and hold in as much or as little energy as is required to clear an obstacle, before releasing to launch into the air.
On its own, this system can jump to a height of 3 m (9.8 ft), but the researchers fitted it to the underbelly of a DASH. The little robotic critter weighs 60 g (2.1 oz) and can scuttle along toward an obstacle before timing its leap to spring up to 1.6 m (5.2 ft) into the air.
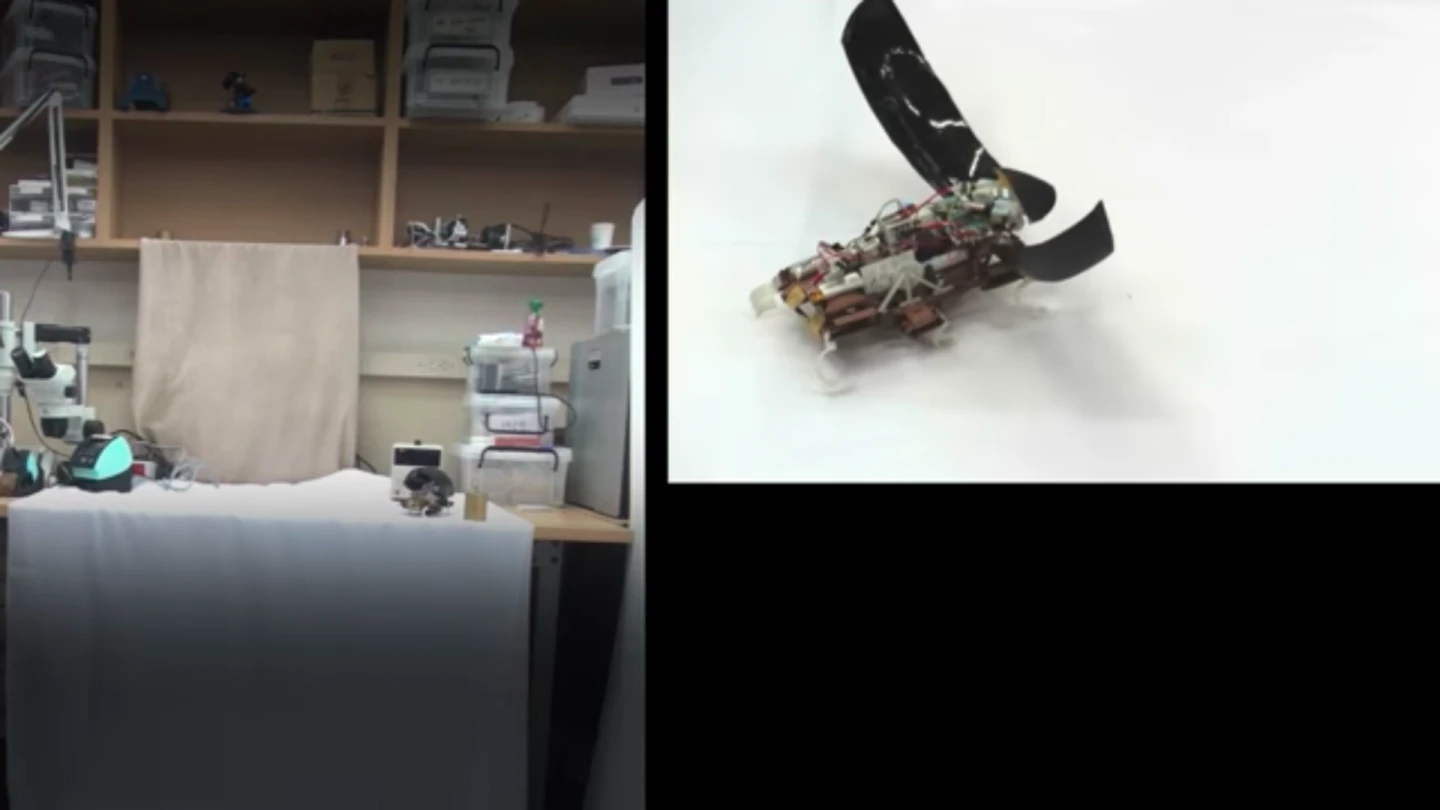
A cockroach it might be, but a cat it is not, so the JumpRoACH coming down to land on its feet is no guarantee. To address this problem the team hooked up the same DC motor to its shell, which spreads the robot's exterior and turns it the right way up should it land on its side or back.
The team presented its research at the IEEE International Conference on Robotics and Automation in Stockholm, Sweden this month. The paper can be read online here, while a video showing the JumpRoACH in action can be seen below.
Source: IEEE Spectrum





