
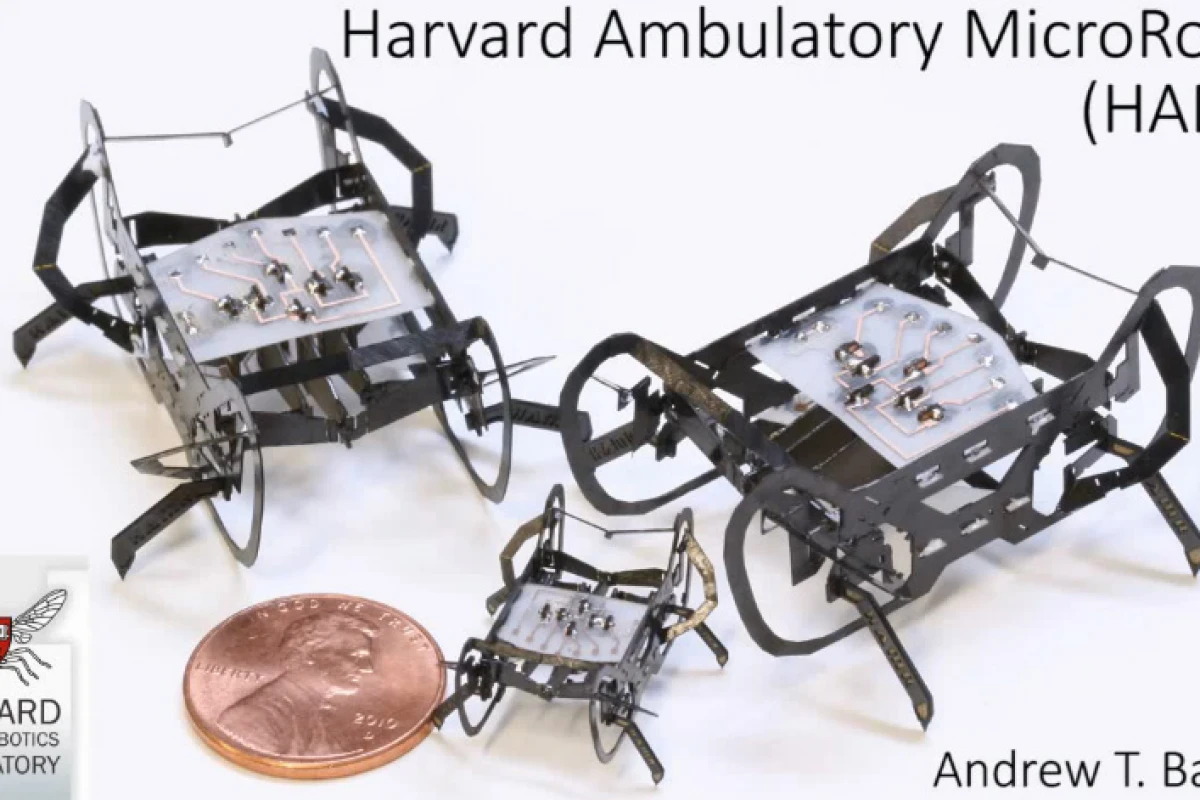

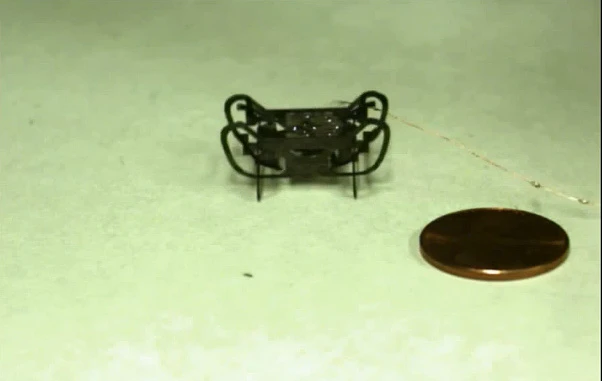
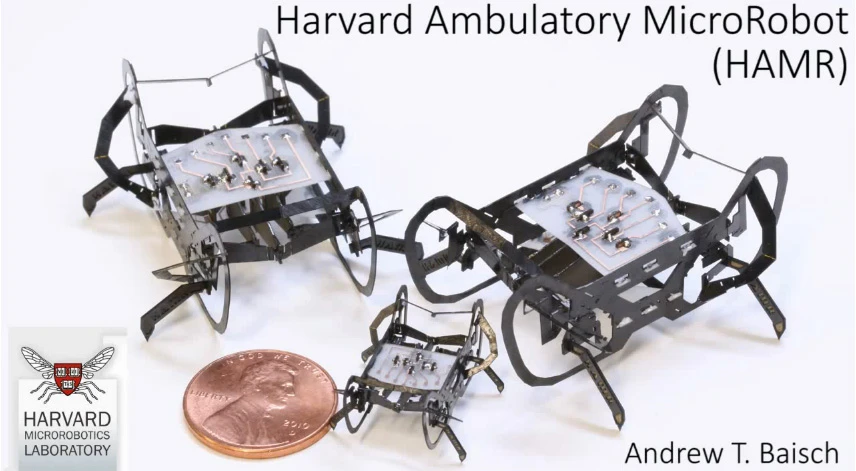
Though there's much work to be done before miniature robots move exactly like insects, Harvard Microrobotics Lab is making strides with its latest prototypes. It recently demonstrated the Harvard Ambulatory MicroRobot (HAMR), a 4.4 cm (1.7 in) quadruped that scurries around at up to 8.4 body lengths per second.
Andrew Baisch has been developing the robots over the last five years while earning his PhD under the principal investigator, Professor Rob Wood. Quick assembly of the prototypes was made possible by the lab's Printed Circuit Microelectromechanical Systems (PC-MEMS) manufacturing method, where materials are sandwiched together in 23 microscopic layers and laser cut into patterns. Flexible materials in the pattern serve as hinges, allowing panels to be folded into three dimensional shapes much like the pages in a children's pop-up book (though some components are still assembled by hand).
By simply scaling the design file, they managed to produce a version weighing just 270 mg that was about the size of a penny. The larger HAMR weighs 1.3 grams (0.045 oz), which is comparable to some insects. And, like an insect, HAMR can carry more than its own body weight. However, typical actuators like electric motors or hydraulics are much too large and heavy for it. Instead HAMR's legs wiggle back and forth at 70 Hz powered by six piezoelectric ceramic actuators controlled by two simple control inputs.
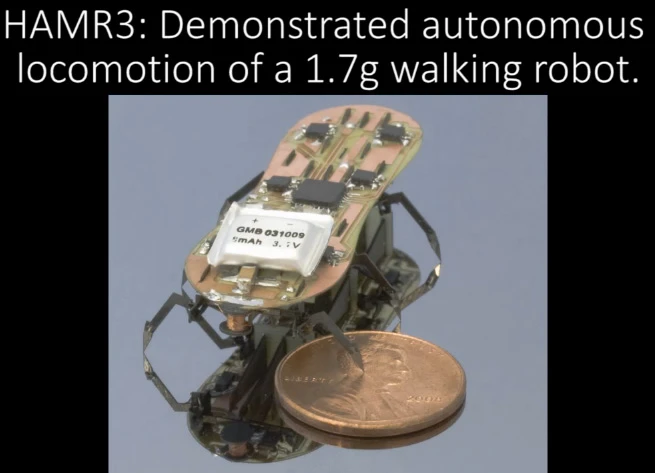
One of the main issues with the actuators is the high voltage they require, which tethers it to an external power source. However, the researchers have managed to build a self-contained prototype, HAMR3, with help from Christian Heimlich. It carries its own power, bumping the weight up to 1.7 g (0.059 oz), but it moves slower due to the battery's lower voltage.
Recent breakthroughs in 3D printed batteries on the micron scale could lead to even smaller autonomous microrobots, and may be necessary for the lab's winged Robobee to maintain its fly-weight. For the time being HAMR remains tethered, but it can turn left and right and is pretty fast.
You can see the HAMR's speed for yourself in the video below.
Source: Harvard Microrobotics Lab





