




When it comes to underwater robots, there are basically two kinds – sleek Autonomous Underwater Vehicles (AUVs) that gather data while cruising along by themselves, and bulkier Remotely Operated Vehicles (ROVs) that perform tasks while being controlled in real time. Texas-based Houston Mechatronics is combining the two, in the form of the Aquanaut.
Houston Mechatronics was founded four years ago, by a group of former NASA roboticists. Its Aquanaut, which is still in development, is being designed to work in a couple of different modes.
In Excursion Mode, with its body closed up and streamlined, the 1,050-kg (2,315-lb) robot is launched either from the shore or from an offshore facility. Propelled by two rear thrusters, it then proceeds to autonomously travel at a maximum speed of 7 knots, potentially covering a round-trip distance of over 200 km (124 miles) on one charge of its 30-kWh battery pack.
Along the way, it's able to perform tasks such as acoustical, optical, and geochemical remote sensing, using an articulated "sensing head assembly" equipped with sensors such as cameras or sonar units.

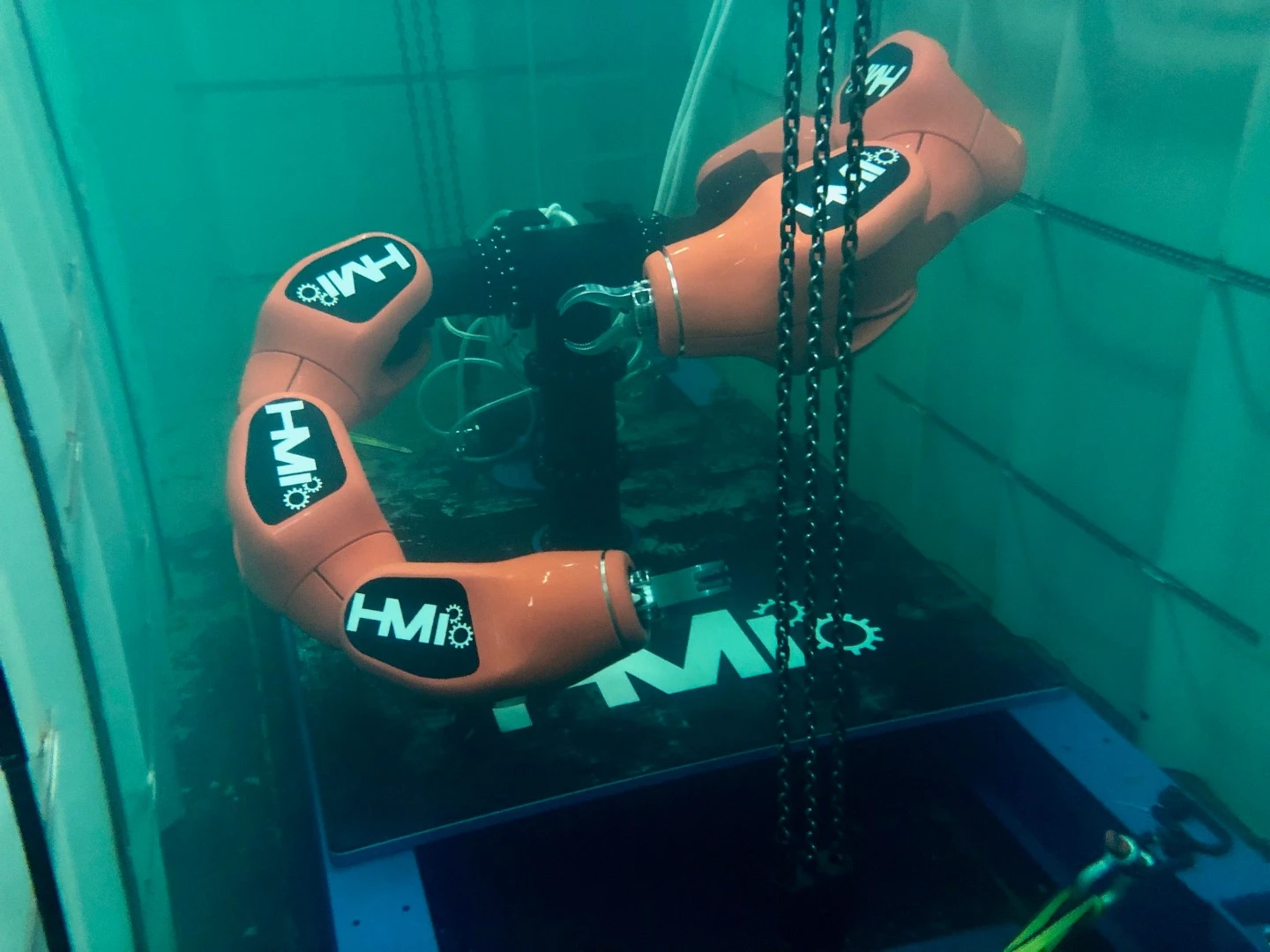
While it can perform entire missions in Excursion Mode, the Aquanaut can also transition into Work Class Mode upon reaching a predetermined destination. When it does so, its hull opens up to expose two additional vectored thrusters, two 8-DOF (degrees-of-freedom) electric manipulator arms, and a payload bay. Its sensing head also gains another degree of freedom, allowing it to pitch and roll in order to maintain a good view of the task it's performing.
It can then hover in place, moving around as needed, manipulating undersea objects such as valves on oil-drilling platforms. And while plans call for it to be capable of performing some basic tasks autonomously, it will ultimately be remotely operated while in Work Class Mode. Unlike a regular ROV, however, it won't be communicating with its operator via a tether running up to an expensive fully-crewed support ship at the surface. Instead, in a cost-saving measure, that person will be located back on the shore.

"We communicate with the vehicle and supervise its actions over an acoustic data link with a satellite backhaul," Aquanaut product manager Sean Halpin explains to us. "The ACCOMS [Acoustic Communications] link can be up to 10 km [6 miles] from the vehicle. Our command and control software, Commander, was designed to work well in these austere communication environments. Operations with robots in space are accomplished in a very similar way and therefore this paradigm is quite familiar to the team."
The company is aiming to have the first fully-functioning Aquanauts ready for sale by the end of next year.
Source: Houston Mechatronics via IEEE Spectrum





