
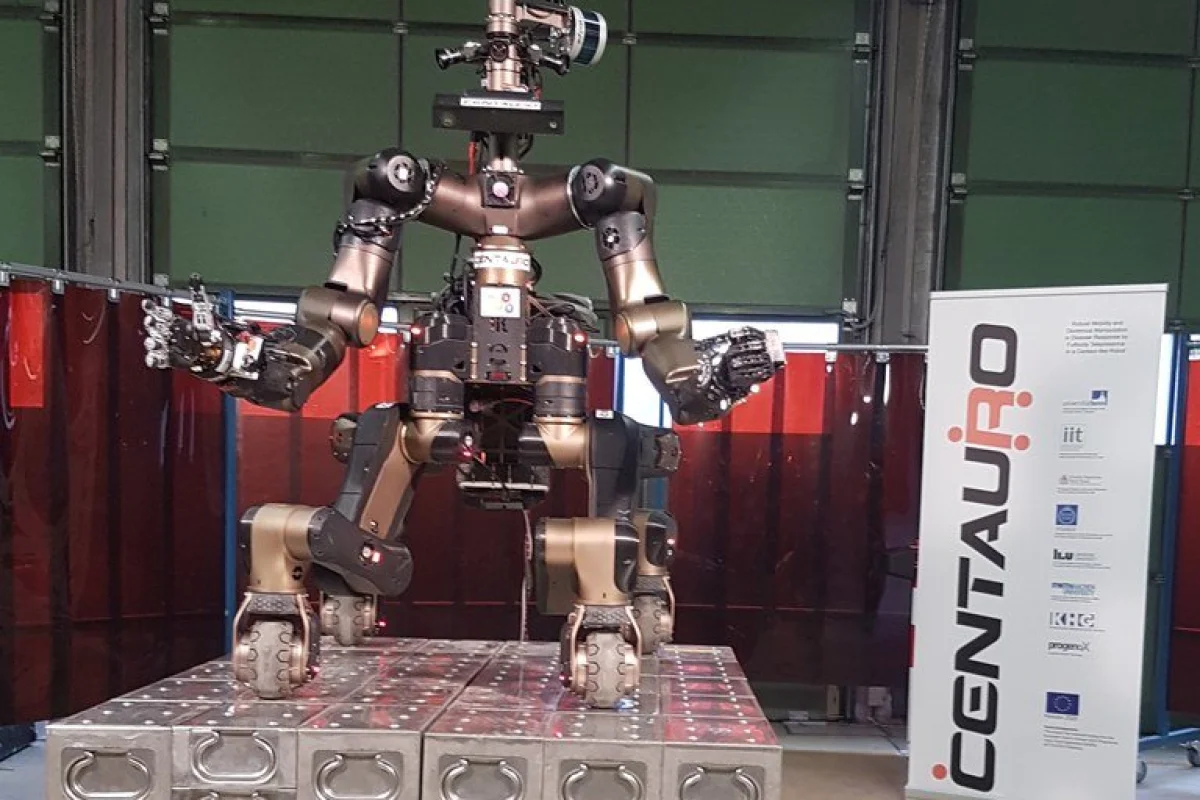

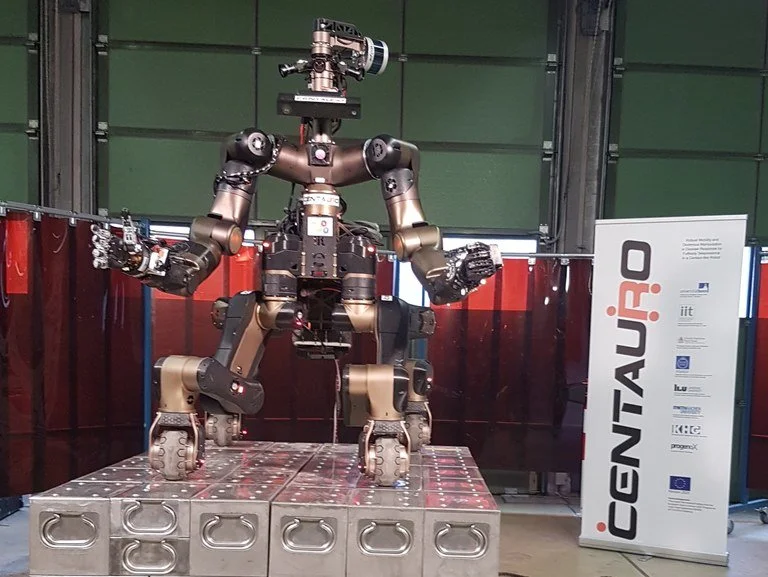
In a remarkable two-for-one, engineers at IIT-Istituto Italiano di Tecnologia have developed a new robot centaur that is not only capable of aiding in disaster situations, but also has a mean karate chop. Called Centauro, the 1.5-meter-tall (5 ft), 93-kg (205-lb) robot combines two arms with four legs in a robust construction to give it both dexterity and stability while dealing with harsh environments.
If you look at videos of 2015's DARPA Robotics Challenge, you'll notice that the bipedal robots of just three years ago had one depressing tendency – they fell down a lot. For robots designed for disaster relief, it makes a lot a sense to base them on the human body. Not only can humans navigate a remarkable variety of terrains, but humanoid robots are better at handling architecture, machines, vehicles, and tools built for humans. However, humans do have drawbacks.
For one thing, the human is body is so unstable that walking has been described as controlled falling down. That's a problem because it implies that if things go wrong, falling down is the likely result. Though some of the latest bipedal robots show a remarkable degree of stability and agility, standing and working on two legs is still a less sturdy platform than four legs.

Working from this basis, a team led by Nikos Tsagarakis at the IIT-Istituto Italiano di Tecnologia's Humanoid and Human Centred Mechatronics Lab developed Centauro around a four-legged base and an anthropomorphic torso with two arms for lifting and manipulating objects. The robot is also designed to be on the tough side with components made out of aluminium, magnesium, and titanium alloys, as well as 3D-printed plastics to allow for rapid prototyping.
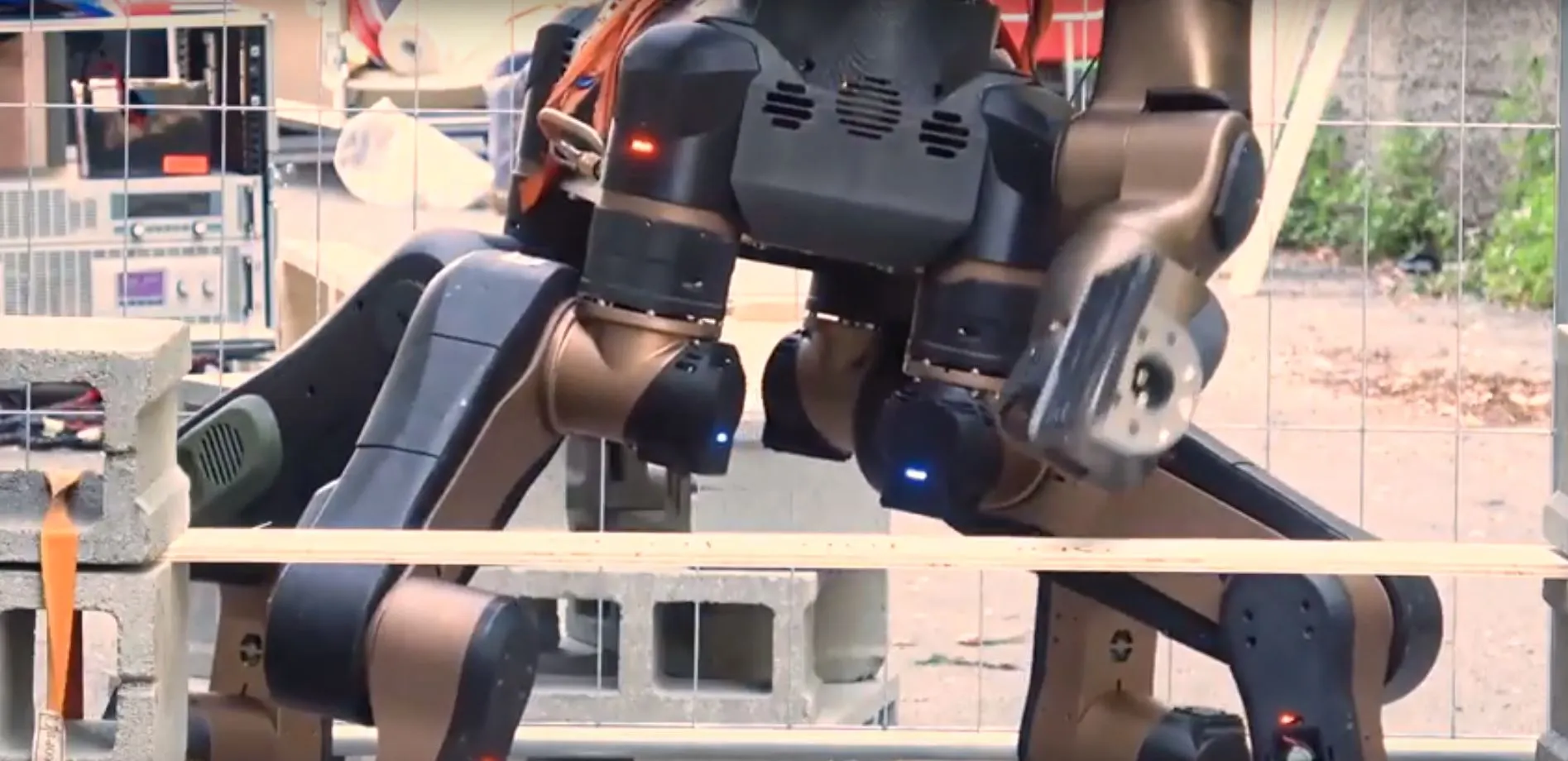
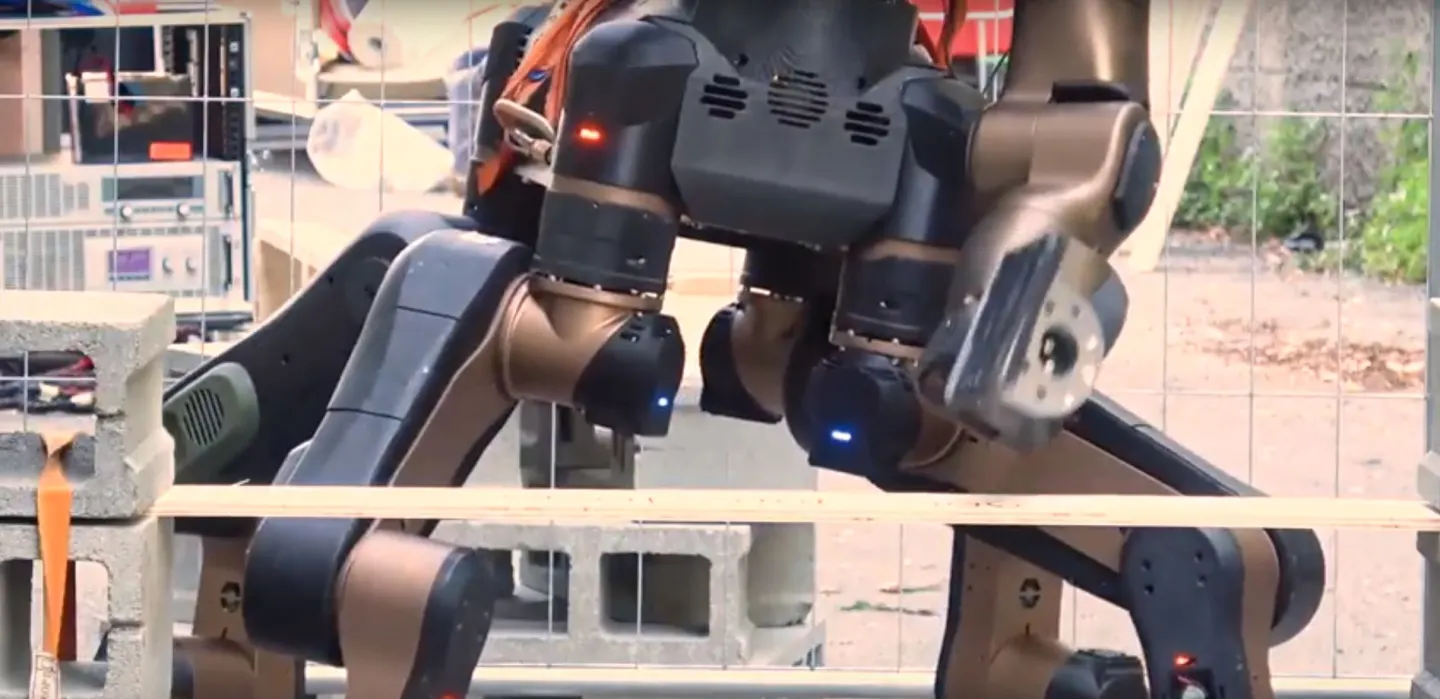
The quadrupedal design makes Centauro stable while working, yet able to navigate manmade environments with doors and narrow corridors, as well as debris-strewn areas. The legs not only let the robot walk and climb stairs, but each leg has a powered aluminium wheel shod in a high-friction elastomer material for fast travel on flat surfaces. Each leg has six-degrees of freedom with rotating and extending hips, knees, and ankles.
According to the team, this configuration allows the robot to handle power tools, while the lightweight arms with the ability to lift about 11 kg (24 lb) are designed to combine the manipulation strength of a human adult with dexterity and the ability to withstand physical shocks to the usually vulnerable actuators. The latter is particularly important because Centauro's party piece is being able to break wooden planks with a neatly executed karate chop.
The head contains Centauro's sensors, including imaging cameras, RGBD (red, green, blue, depth) sensors, and a lidar system for all-around coverage, while high fidelity torque sensing and thermal sensors are scattered throughout the body.
Centauro is powered by a 1.6-kWh Li-Po battery for 2.5 hours of operating time, with three on-board computers handling information processing. Control of the robot is through a combination of telepresence and predictive semi-autonomous systems. This means that a human operator directly controls the movement of the robot and its limbs, but in the event of a communications break or delay, the on-board computers can predict the intended movements and complete them without assistance.
The video below shows Centauro making some moves and breaking some boards.
Sources: Istituto Italiano di Tecnologia, Centauro Project






