
Back in October, we heard about MIT's M-Blocks – they're metal cubes that use internal flywheels to hurl themselves around, sticking together magnetically to form simple structures. Now, scientists from ETH Zurich have unveiled something similar. Their Cubli cubic robot also uses flywheels to move around, plus it can actually balance on one corner.
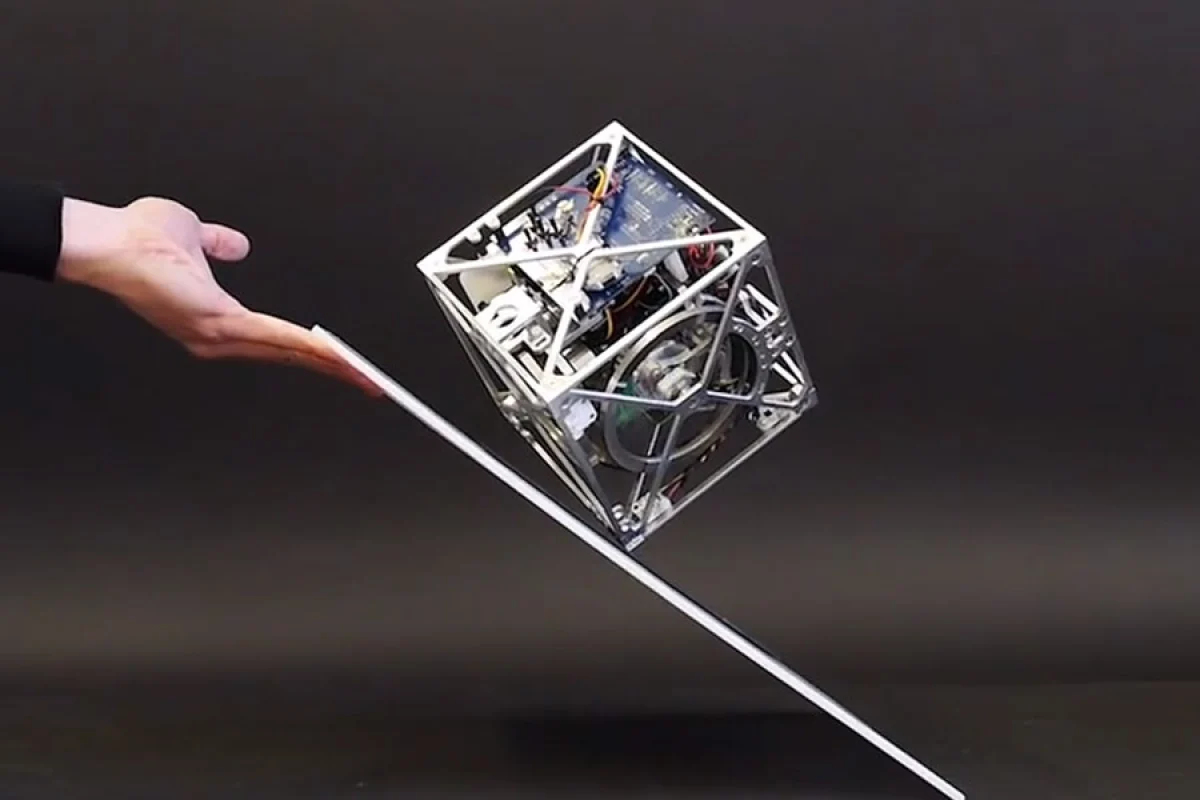
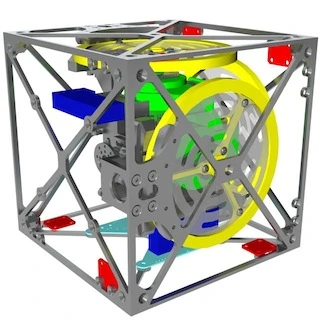
The robot measures 15 cm (5.9 in) per side and contains three "momentum wheels," each one powered by its own brushless motor, and each located on a different face of the cube. It also incorporates inertial sensors, motor controllers, batteries and a microprocessor.
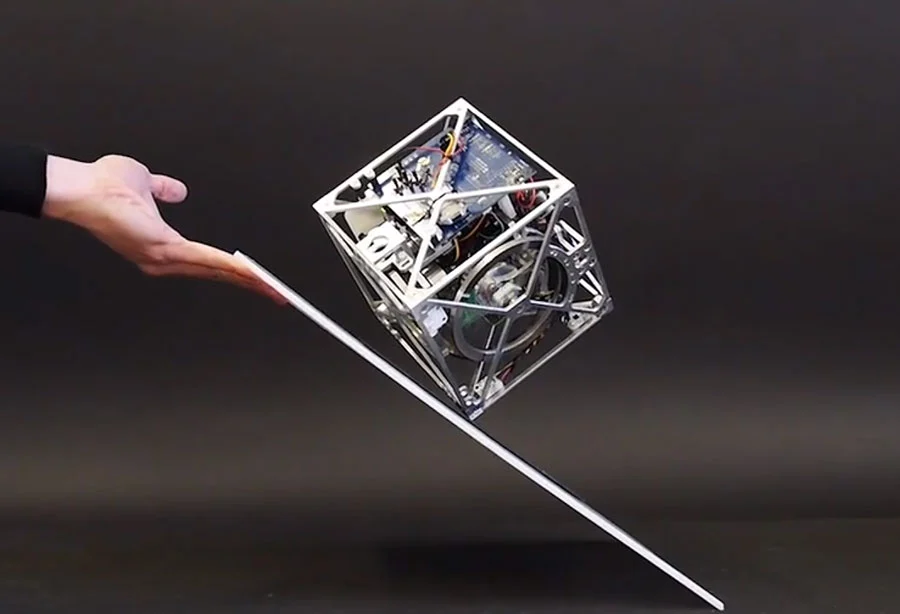
The inertial sensors allow the processor to gauge the tilt and angular velocity of the cube. In the case of the corner-balancing stunt, it then activates the wheels, using their combined and constantly-modulated torque to hold it in place. It can even maintain its balance when pushed or when its balancing surface is tilted, plus it can rotate on the spot or balance on one edge.
Additionally, as with the M-Blocks, it can move by running one or more of its wheels at high speed, then suddenly braking to transfer momentum from the wheel to the cube itself. This feature took some finessing, as the mechanical stress resulting from the sudden braking originally caused both the wheel and the Cubli's metal frame to deform. Replacing the "metal barrier"-type brake with a modified bicycle brake fixed the problem.
Using that braking technique, the robot can now get up onto one edge from a resting position, proceed to a corner balance, and then fall back down in any desired direction. By repeating these steps over and over, it can gradually roll itself from one point to another.
Ultimately, it is hoped that such technology could find its way into things like robots used for exploring the surface of other planets.
The Cubli, which was designed by Mohanarajah Gajamohan and Raffaello D’Andrea, can be seen showing off in the video below.





