



“Quick, send in the robots!” Far-fetched as it may sound, fire-fighting robots are indeed coming closer and closer to common use. While some of them are intended to actually put out the flames, others are designed more to scout out structures before human firefighters enter, letting those people know how to safely get around and where to concentrate their efforts. One of the latest machines in the second category is the self-balancing Firefighting Robot (FFR), being developed at the University of California, San Diego.
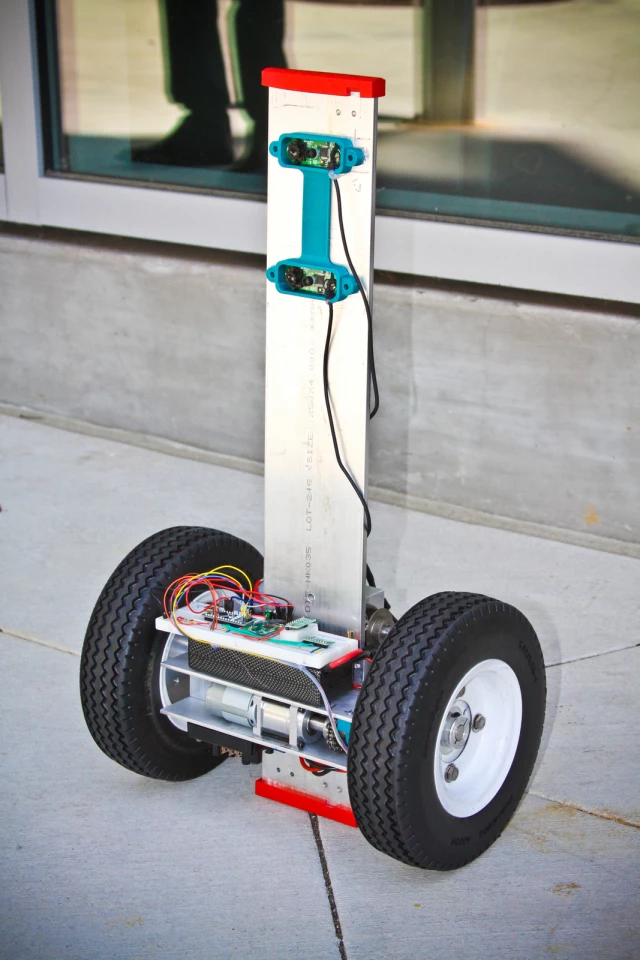
The two-wheeled FFR looks not unlike a Segway without a rider, and features two RGB video cameras (giving it stereoscopic vision), along with an infrared camera. Its central vertical “leg” can slide up and down within its body, allowing the robot to lift itself up over obstacles and even climb stairs.
The idea is that multiple FFR’s would go into a burning building and both autonomously and collaboratively scout its interior, using their three cameras to create 3D maps that included temperature data. That data could indicate hot spots for the firefighters to avoid, or it could indicate the live bodies of people trapped inside – the RGB images would show which was the case.
Other sensors on the FFR’s could also provide information on things like the presence of volatile gases and the structural integrity of the building.
Firefighters waiting outside would receive a wireless transmission in almost real time, as the robots were compiling the data. When subsequently entering the building, the firefighters would know exactly where to head to rescue the occupants and extinguish the flames, while putting themselves at less risk.
A prototype FFR can be seen in action in the video below.
Source: UCSD Jacobs School of Engineering


