
Providing robots with sensory inputs is one of the keys to the development of more capable and useful machines. Sight and hearing are the most common senses bestowed upon our mechanical friends (perhaps soon to be foes?), but even taste and smell have got a look in. With the sense of touch so important to human beings, there have also been a number of efforts to give robots the sense of touch so they can better navigate and interact with their environments. The latest attempt to create a touchy feely robot comes from the Technical University Munich (TUM) where researchers have produced small hexagonal plates, which when joined together, form a sensitive skin.
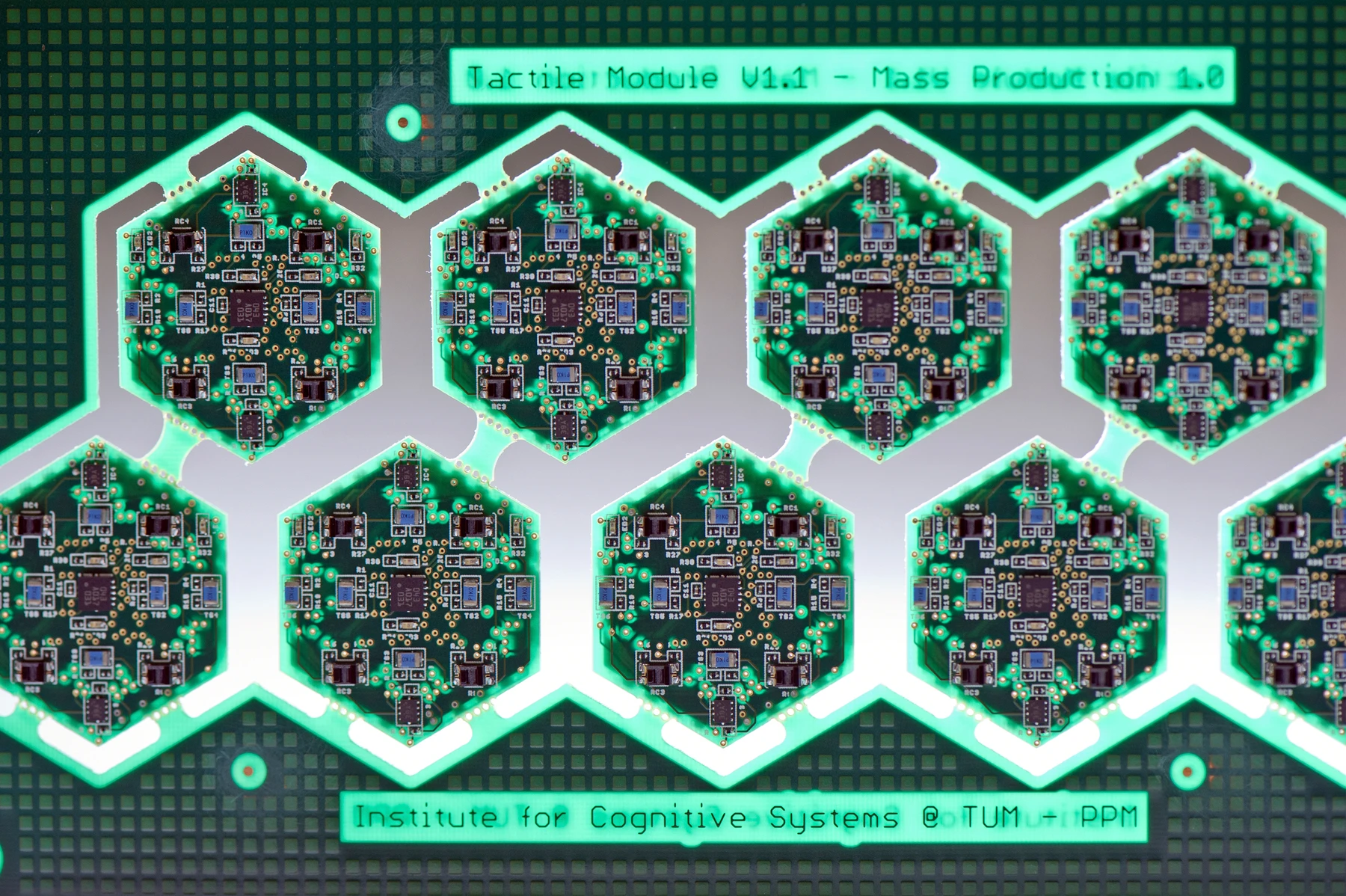
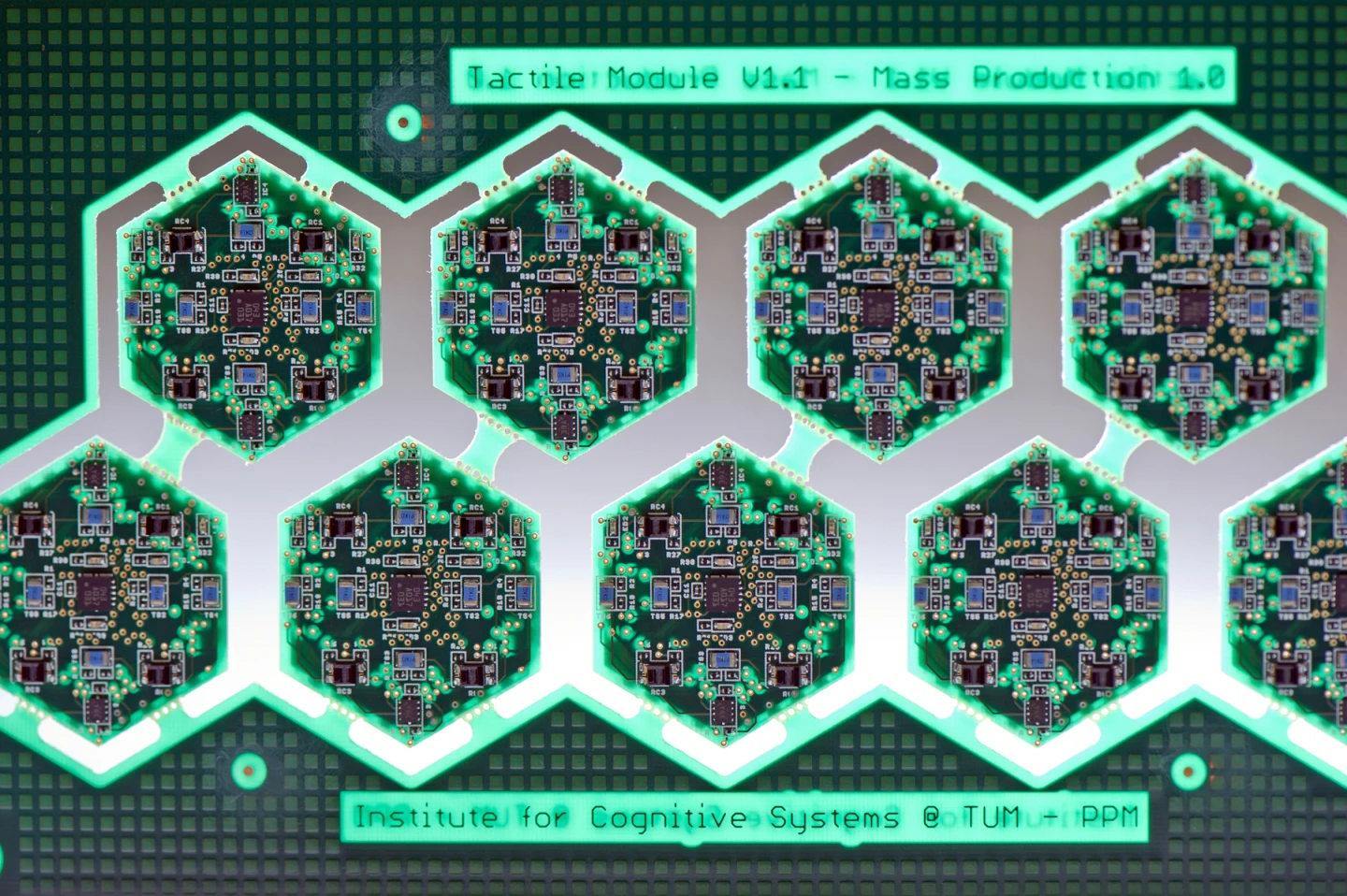
The artificial skin isn't flexible like some previous robotic skin technologies we've seen, but is made up of rigid, five-centimeter square (0.77 sq in), hexagonal circuit board plates. Each small circuit board contains four infrared sensors that detect anything that comes closer than a centimeter (0.39 in) to effectively simulate light touch. Thus, the robot can detect when it runs into an object, and either spontaneously retreat or direct its eyes to examine the object.
But with human skin also conveying other information, such as temperature, shear forces and vibrations, the TUM researchers have also embedded the plates with six temperature sensors and an accelerometer. The researchers say these will give a robot self-perception by allowing it to accurately register the movement of individual limbs to learn which body parts it has moved.
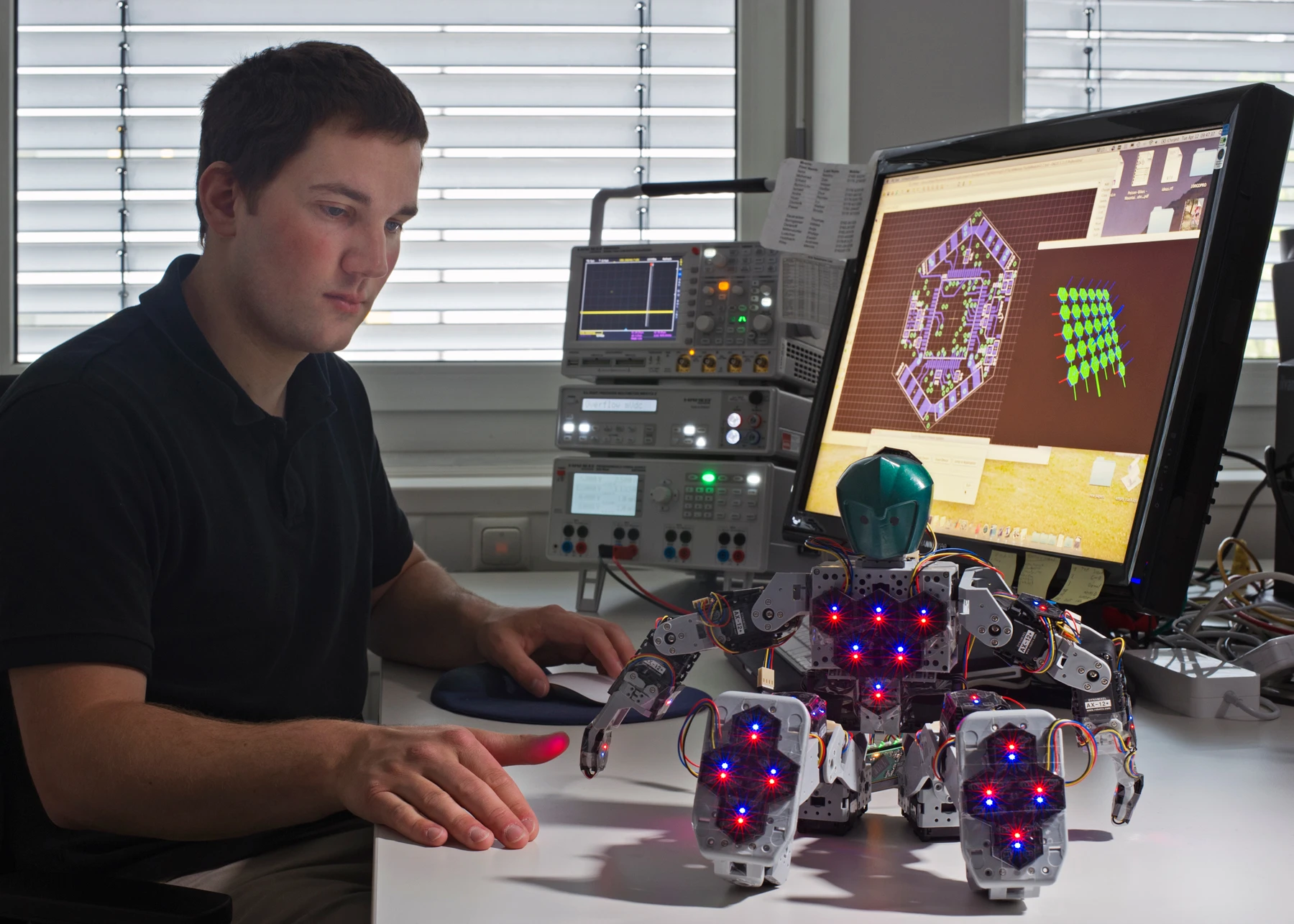
"We try to pack many different sensory modalities into the smallest of spaces," explains Philip Mittendorfer, a scientist who developed the artificial skin at the Institute of Cognitive Systems at TUM. "In addition, it is easy to expand the circuit boards to later include other sensors, for example, pressure."
The plates are arranged in a honeycomb-like, planar structure that is worn by the robot. Although the signals from the sensors are processed centrally, each sensor also serves as a data hub for different sensory elements to ensure that signals can be rerouted if a connection should fail.
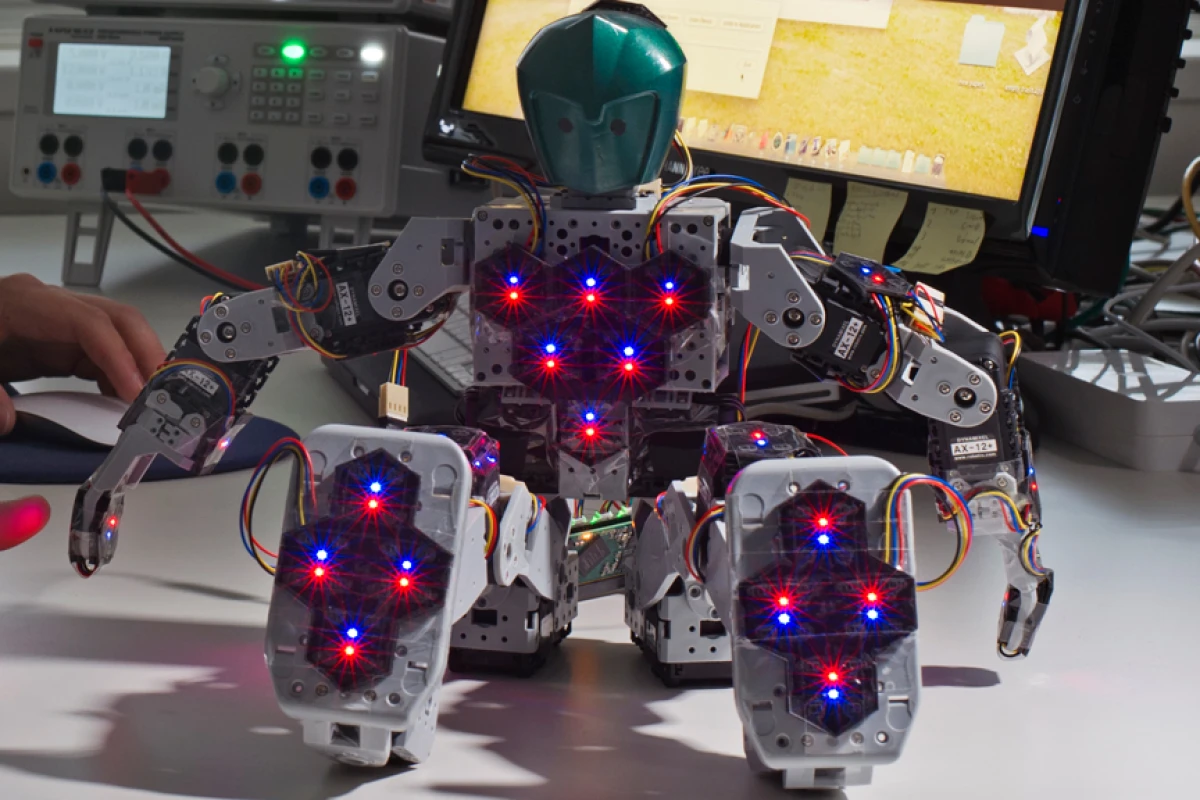
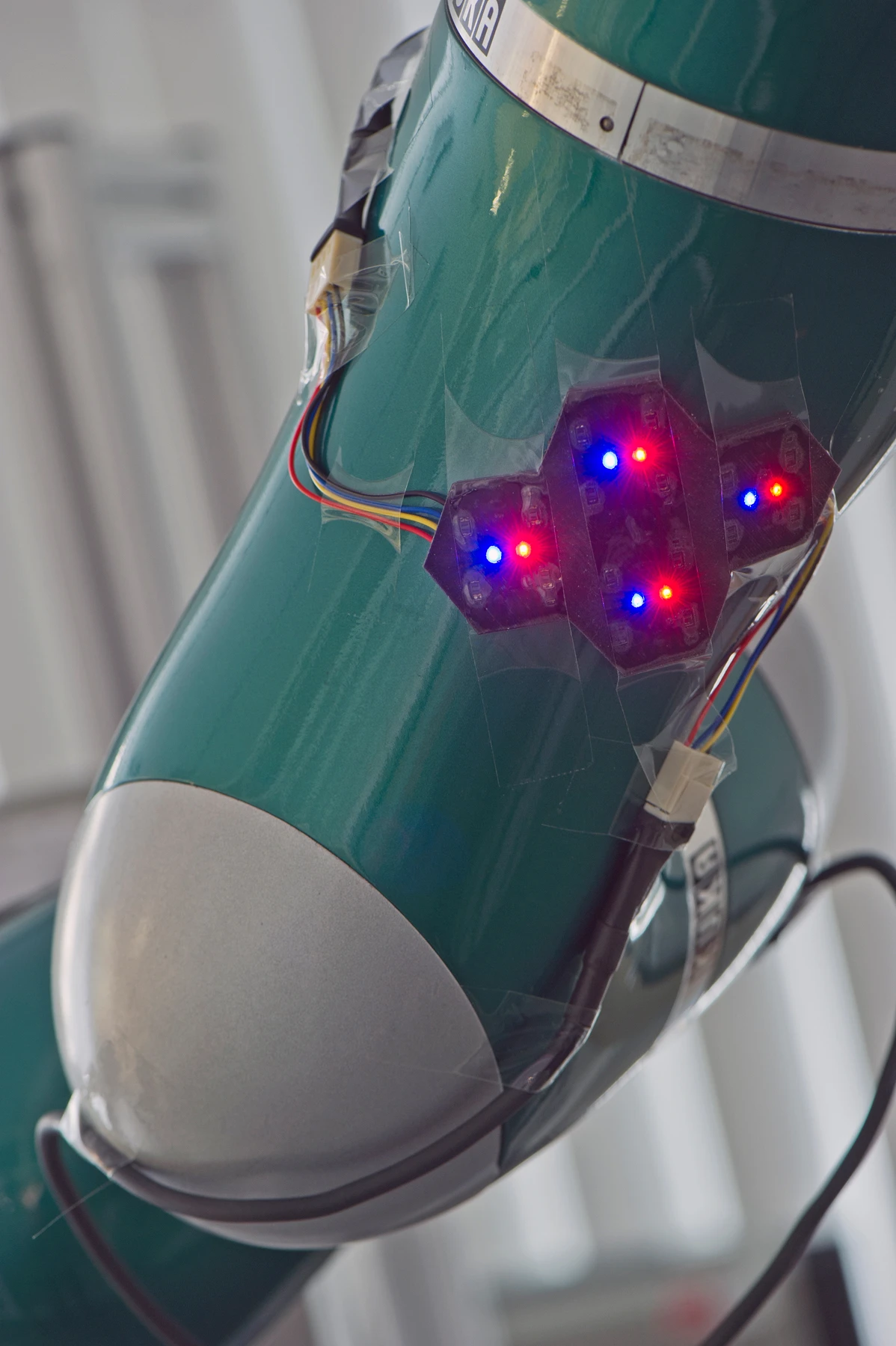
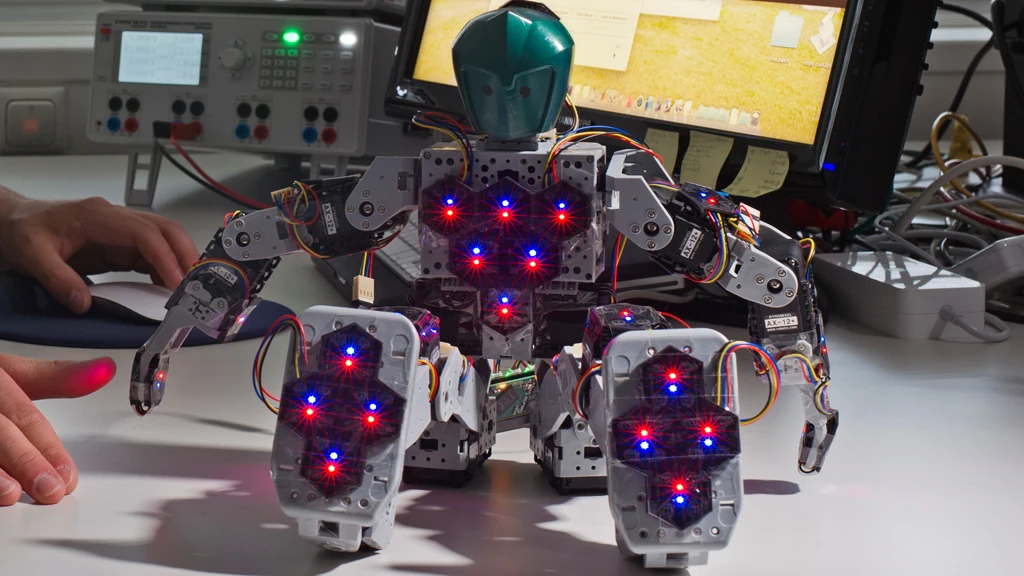
So far the researchers have attached 31 sensor modules onto a Bioloid robot to form an incomplete skin and show that the principle works. They have also tested the sensor modules on the curved skin of a robot arm. Both robots reacts to light pats and even people blowing on the skin.
"We will close the skin and generate a prototype which is completely enclosed with these sensors and can interact anew with its environment," says Mittendorfer's supervisor at TUM, Prof. Gordon Cheng.





