





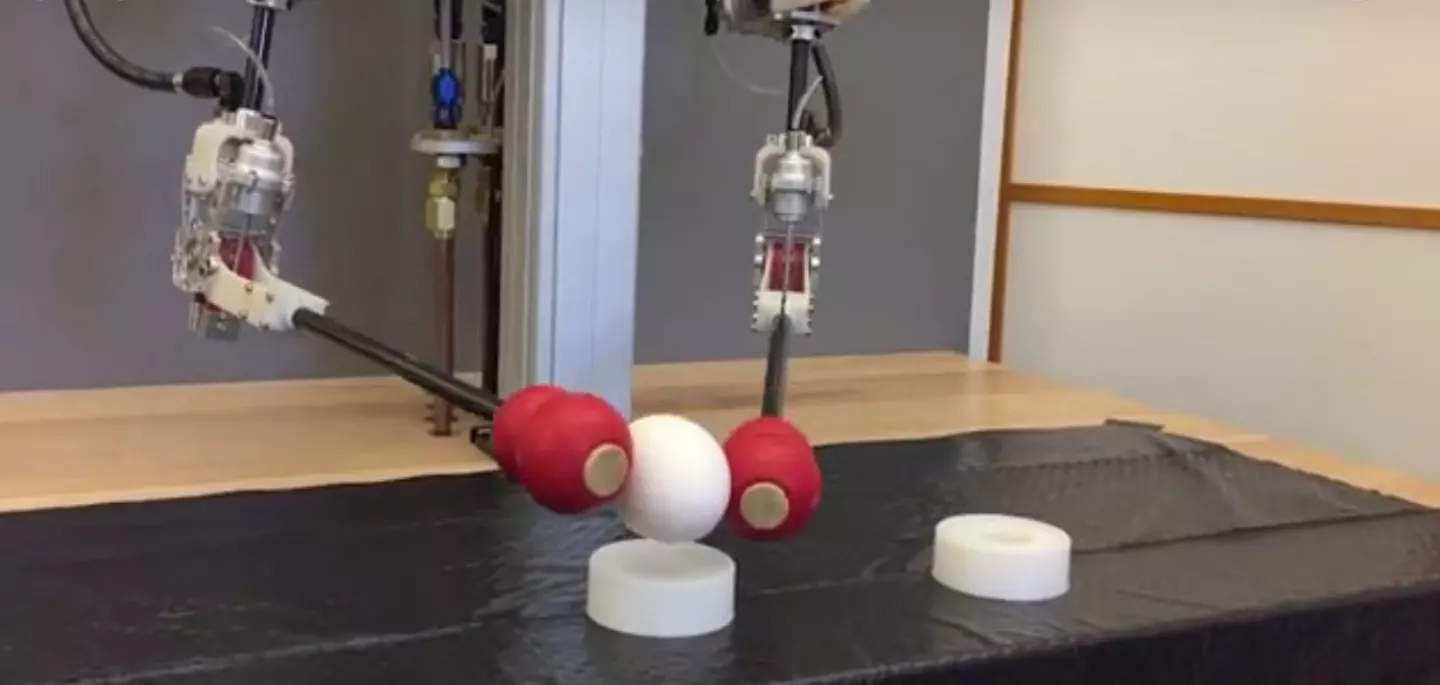
Disney Research has come up with a glockenspiel-playing robot that can indulge in balloon toss ... when it isn't safely picking up fresh eggs. The telepresence robot uses a new type of hydrostatic transmission that combines hydraulic and air lines to provide more degrees of freedom as well as greater precision and delicacy of touch in a lighter, simpler design.
Since the earliest Waldo manipulators, telepresence systems have favored either mechanical designs using gears, cables, and linkages; hydraulics; or pneumatics. Each of these has its strengths and each has its weaknesses. For example, cables running along pulleys and operating linkages have been used in teleoperators since 1945. These are very basic and the simpler versions don't even require an outside power source. However, these have every strict design limits to accommodate the cable runs and motors, and they provide poor feedback and control.
Hydraulics, on the other hand, can provide enough power to turn any human into a Hercules, in addition to having good feedback for precise control. Unfortunately, they are also bulky, the thick hydraulic lines are difficult to fit, and the manipulator can freeze in place when the power cuts out.

On their own, pneumatics aren't a substitute for hydraulics because of their poor load handling and imprecision, but a Disney Research team led by John P. Whitney of Northeastern University has come up with a hybrid hydraulic/pneumatic system to create a surprisingly lifelike telepresence robot.
Instead of joints being opened and closed by means of a pair of hydraulic lines, the hydraulic/pneumatic hybrid system uses a hydraulic line to move a joint in its primary direction, while an air line returns it. According to the team, this is not only a simpler system, but the air acts as a constant force air-spring to moderate the movements of the mechanism as it resets the joint.
In the hybrid, only a single motor is needed, which can be placed wherever is convenient. The hydraulic/pneumatic paired hoses are more flexible in terms of design because only half of the lines are bulky hydraulics. The result is a system that the team describes as light, fast, and dexterous, with low friction and a lack of play that faithfully transmits contact forces to the operator while generating a high-fidelity remote sense of touch using haptic feedback.

In addition, there is a safety factor in the hybrid. Unlike hydraulics, which can jam in place when shut off, the air lines can be quickly bled and even be designed to bleed when the power goes out unexpectedly. So, for example, robotic manipulators open automatically rather than clamp shut, and robot surgeons can be designed to move away from the patient.
In the latest iteration of the hybrid system, Disney Research has built a human-safe, humanoid robot consisting of an upper torso with two club-handed arms with four degrees of freedom and a head carrying stereo cameras.
The robot uses rotary hydraulic actuators with rolling-diaphragm cylinders to operate the joints. These are set in a master/slave arrangement with a controller robot placed behind a wall. The operator manipulates the arms of the controller and the robot follows the moves precisely in real time, and is gentle enough to pick up a raw egg safely and dexterous enough to play balloon toss.
The operator wears a VR headset that allows them to see through the robot's eyes, and the two-degrees of freedom head follows the movements of the operator's head via neck servos. Meanwhile, the low-impedance hydrostatic transmission provides haptic feedback for precise enough control for delicate tasks, such as threading a needle.
The team says that the new robot can be used to study human-robot interactions and as a tool to simulate robot movements.
"The transmission provides our robot with incredibly smooth and fast motion, while also allowing life-like interaction with people and the handling of delicate objects," says Jessica Hodgins, vice president at Disney Research and a professor of robotics at Carnegie Mellon. "For now, the robot is remotely controlled by a human operator, but we would expect the same level of mechanical performance once the motions are automated."
The team's results are being presented this month at the IEEE Conference on Robotics and Automation (ICRA) 2016 in Stockholm.
The video below shows the hybrid robot going through its paces.
Source: Disney Research






