
For some time now, scientists have assumed that dinosaurs' tails didn't simply drag on the group behind them, but were instead held out to serve as a counterweight for the giant reptiles' heavy front ends when running. More recently, however, researchers from the University of California, Berkeley, have discovered that modern-day lizards also use their tails to control the orientation of their bodies when leaping through the air. It's a discovery that could be applied to devices such as search-and-rescue robots, and in fact already has been. Based on their observations, the UC Berkeley team created a small, tailed robot known as Tailbot.
The initial experiments, carried out by staff and students of the university's biology and engineering departments, involved getting red-headed African Agama lizards to run along a short track, launch themselves off of a platform, then land on a vertical surface. They then climbed to the top of that surface, where a shelter awaited.
In some cases, the platform had a surface that the lizard's claws could grip on, whereas in other instances the surface was slick, causing the lizard to slip as it jumped. By viewing slow-motion video of both types of jumps, it was observed that the lizard was able to adjust its body position in mid-air, by throwing up its tail to varying degrees. This allowed it to always land on the vertical surface feet-first, instead of nosing into it on the slip-jumps.
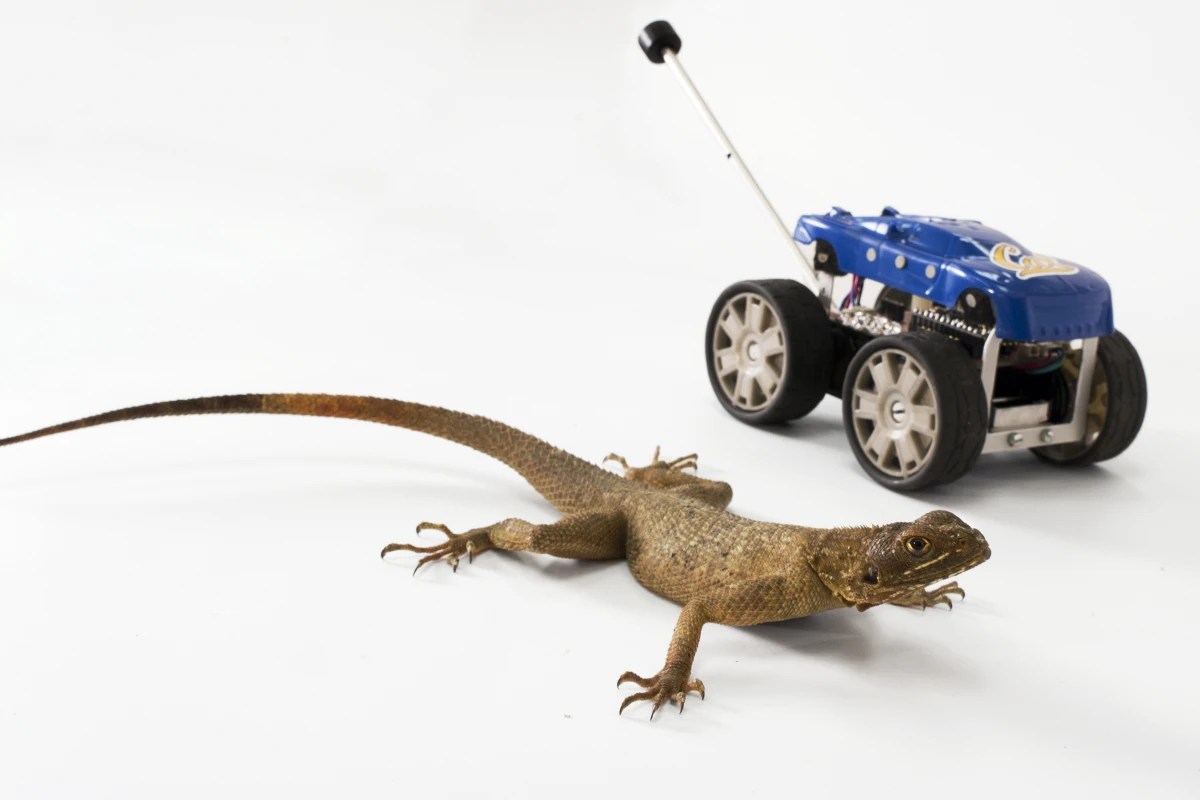
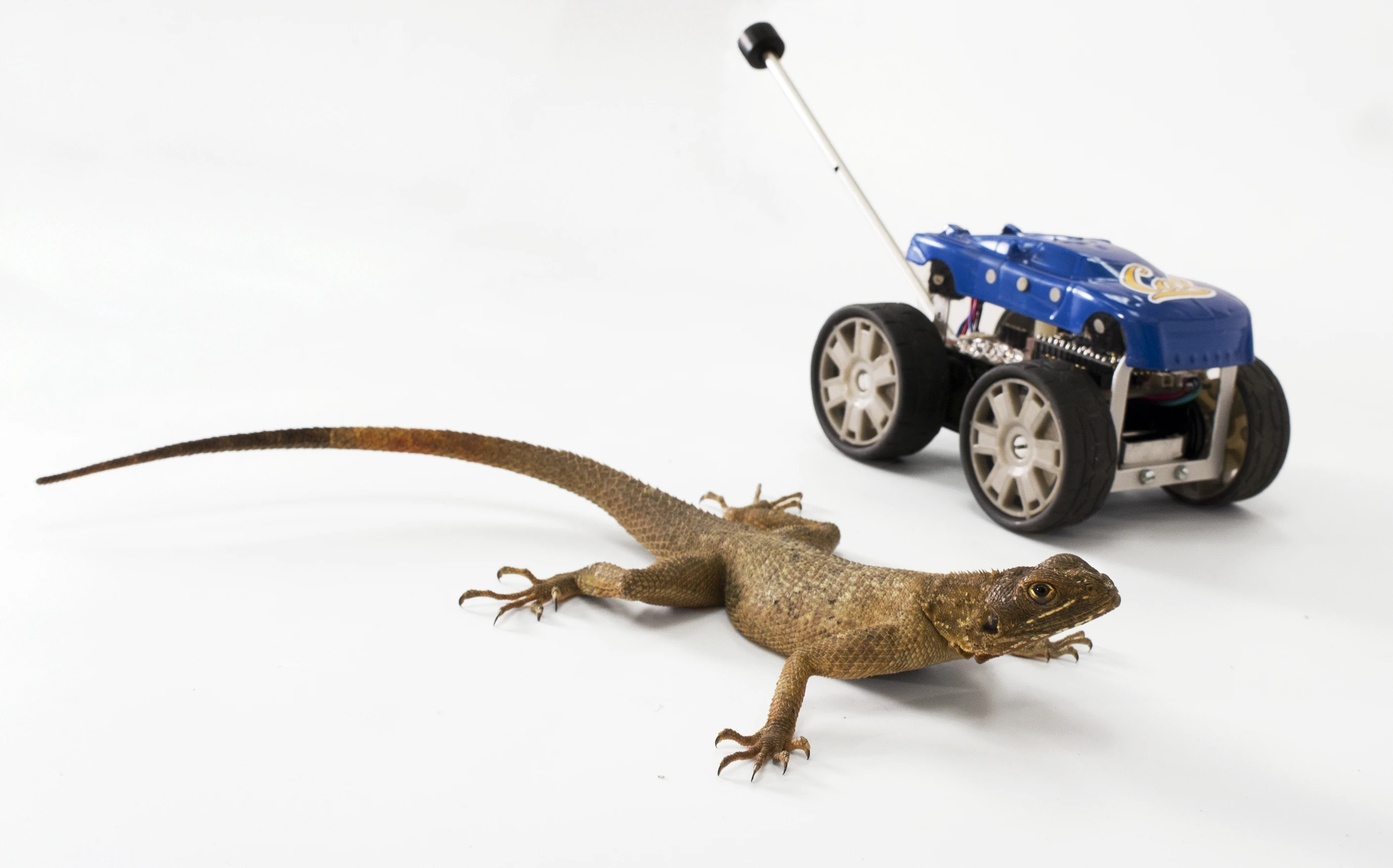
Using the lizard footage, the researchers came up with a mathematical model that determined how much tail swing would be necessary to compensate for a given amount of angular momentum of the body. They also created Tailbot - a small radio-controlled car equipped with a motor-controlled tail, and a gyroscopic sensor.
At first, they had the car/robot make several jumps using a small ramp, with its tail extended but the sensor not running. The result was a series of nose-dives into the floor. Once the sensor was turned on, however, it was able to sense the car's "body" position in mid-jump. It then used the lizard-tail model to adjust the angle of its own tail, resulting in proper wheels-down landings. Even when held in the air and dropped nose first, Tailbot was still able to right itself within a drop space of less than one foot (30.5 cm).
The technology could end up finding use in practical robots. "Inspiration from lizard tails will likely lead to far more agile search-and-rescue robots, as well as ones having greater capability to more rapidly detect chemical, biological or nuclear hazards" said team leader Robert J. Full, professor of integrative biology.
A paper on the UC Berkeley research was recently published in the journal Nature.
The video below illustrates how both the lizards and the robot were able to control their body orientation using their tails.





