


Science fiction is fast becoming reality, with scientists in South Korea developing an astonishingly fast-moving remote-controlled microrobot designed to travel through the human bloodstream to deliver treatment directly to the organs that need it.
Developed by the Department of Robotics Engineering at the Daegu Gyeongbuk Institute of Science and Technology (DGIST), the new microrobot is highly maneuverable and moves a least eight times faster than its most recent predecessor, using a propulsion system inspired by the commonly studied ciliated organism, the paramecium.
The race has been on for some time now to develop ways to deliver treatment directly to the body part where it's needed – such as a clogged artery or tumor. This is because conventionally administered drugs must travel through the entire system, which carries a risk of overdose and often causes side effects such as nausea and weakening of the immune system.
A major challenge in creating a microrobot that can travel directly to an affected organ is the way fluids in a microscopic environment work.
Microorganisms such as bacteria and protozoa propel themselves the way they do for a reason – they can't move efficiently through fluids in a macro environment using the kinds of movements that larger animals use. This is especially the case in a fluid that is thicker than water, such as human blood, where even the types of propulsion systems used by boats and submarines aren't efficient.
That's why scientists and engineers have been looking to nature for answers, and experimenting with microrobots that propel themselves in the various ways that microorganisms such as protozoans and bacteria move. Until now, however, a paramecium-like propulsion system with the large number of moving, hair-like cilia that these organisms use has seemed beyond reach.
The South Korean research team achieved this world first by using 3D laser lithography to create a ciliated polymer base structure for the microrobot. They then deposited a layer of nickel and titanium over the cilia to provide magnetic actuation and ensure it is compatible with a biological system.
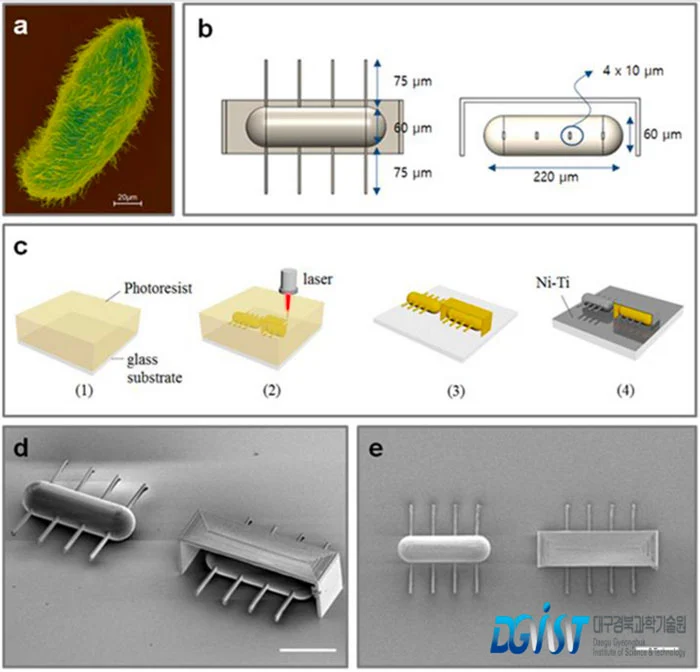
The researchers were then able to set the cilia beating back and forth using an electromagnetic coil system, with impressive results.
The 220 micrometer-long robot can move 340 micrometers per second, with a much greater range of maneuverability than previous microrobots operating under magnetic attraction drive, according to the researchers. The controller can shift the angle of the microbot from zero to 120 degrees, which would allow it to navigate its way through blood veins in a body.
An example of the speed and range of movement can be seen in the video below.
If it lives up to its promise, the new microrobot will be able to deliver heavier and more complex payloads to target areas than previous microrobots. Scientists envision an injectible microrobot that can dissolve harmlessly within the body after its mission is complete.
The next phase, according to the South Korean researchers, is further biocompatibility studies, and potentially tailoring the microrobot's functionality to different tasks and environments.
"We'll continually strive to study and experiment on microrobots that can efficiently move and operate in the human body, so that they can be utilized in chemical and cell delivery as well as in non-invasive surgery," says team leader Professor Hongsoo Choi.
The research is published in Nature.
Source: DGIST





