








The string of disastrous floods currently plaguing Britain demonstrate that managing rivers and other waterways is about more than protecting curlew nests and counting otters. To help provide a better understanding of riverine areas, a team headed by José Barata and Pedro Santana of the University of Lisbon is developing a “marsupial” robotic system called Riverwatch that teams a robotic catamaran with an on-board hexacopter to survey areas beyond the reach of the hip-boots and rubber raft brigade.
Rivers, swamps, broads, marshes and similar soggy environments are vital to understanding local ecology, protecting against floods, and sorting out proper water management. Unfortunately, they are surprisingly difficult to survey. As anyone who’s been stranded thanks to a weed-snarled propeller can tell you, many areas are horrible places filled with reeds, muck, mud, bugs, leeches, and ghastly smells.
One solution to this is to use remote sensors, such as onshore, installed on buoys, or mounted on poles. This has been a partial solution, but fixed sensors can’t provide much in the way of detail and they can’t always collect samples where they’re needed. A robot would be ideal, since it isn't bothered by mosquitoes and can be designed to handle shallow water and mud. However, robots are hard to navigate because they can’t see much – especially in cluttered streams with their sensors close to the water.

Previous ways of getting around the navigation problem involved helicopters acting as spotters for the robot, but this is expensive and potentially hazardous. The Riverwatch solution is to create a sort of robotic symbiosis that combines the strengths of a surface vehicle with that of an Unmanned Aerial Vehicle (UAV).
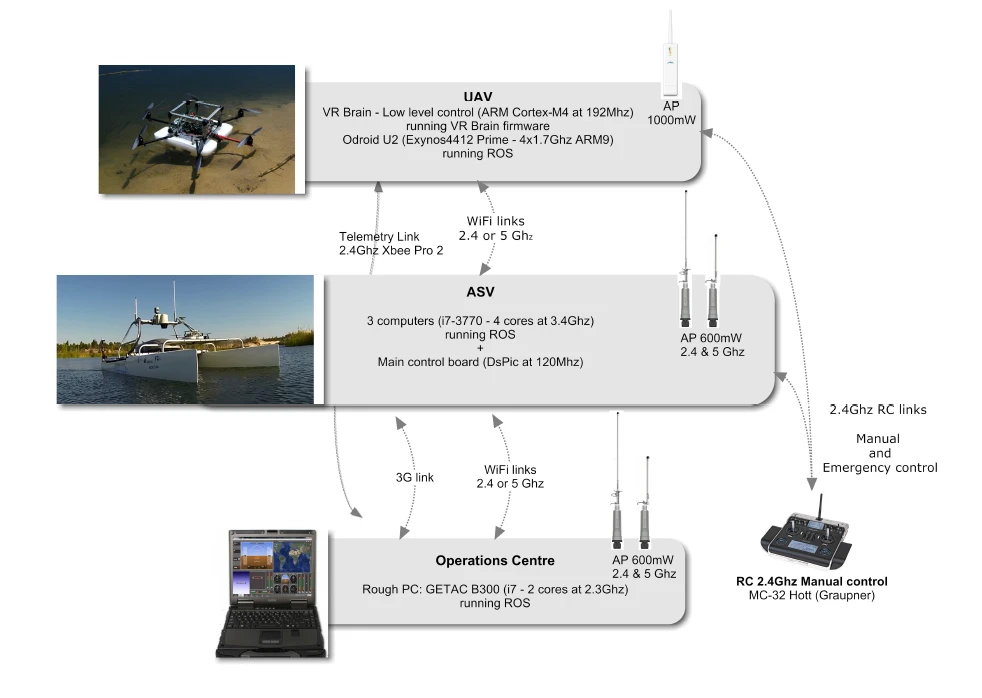
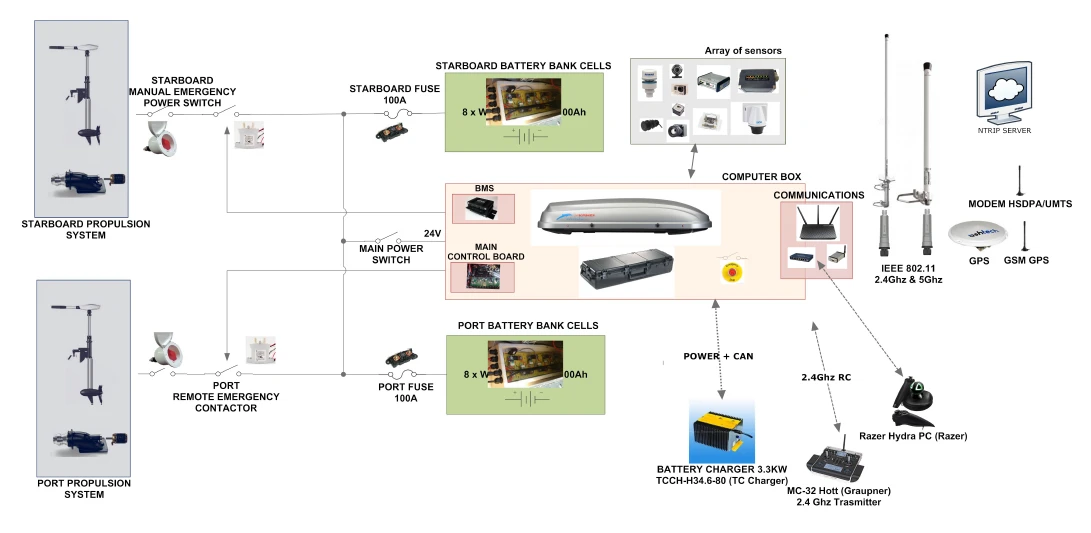
Riverwatch consists of an Autonomous Surface Vehicle (ASV), which is basically a robot boat, and a UAV. The ASV started life as a 4.5 m (14 ft) Nacra catamaran with the hulls filled with PVC closed cell foam and carbon reinforcements added for rollbars and for mounting a pair of 2 bhp Haswing Protuar motors. In addition, the ASV has visual and sonar sensors and a docking station marked with a large H to aid in aerial image tracking. The sensors allow the ASV’s onboard computers to match images and sonar readings against satellite images and other data to build a virtual map to fix its position and to plot navigation paths.
On the back of the ASV is a six-rotor UAV. This is able to take off and land from the robot boat and provides and extra pair of eyes to help the ASV fill in the gaps, so it can pilot more accurately and efficiently. Though the idea was considered by the Riverwatch team, the UAV doesn’t take actual pictures as part of the survey. The UAV is a hexacopter using Virtualrobotix’s VR Brain 4, which was chosen because its open source, is equipped with a powerful microprocessor, and has six rotors instead of the typical four. According to Riverwatch, the extra rotors provide greater lift capacity and make the craft easier to control if one of the rotors fails.

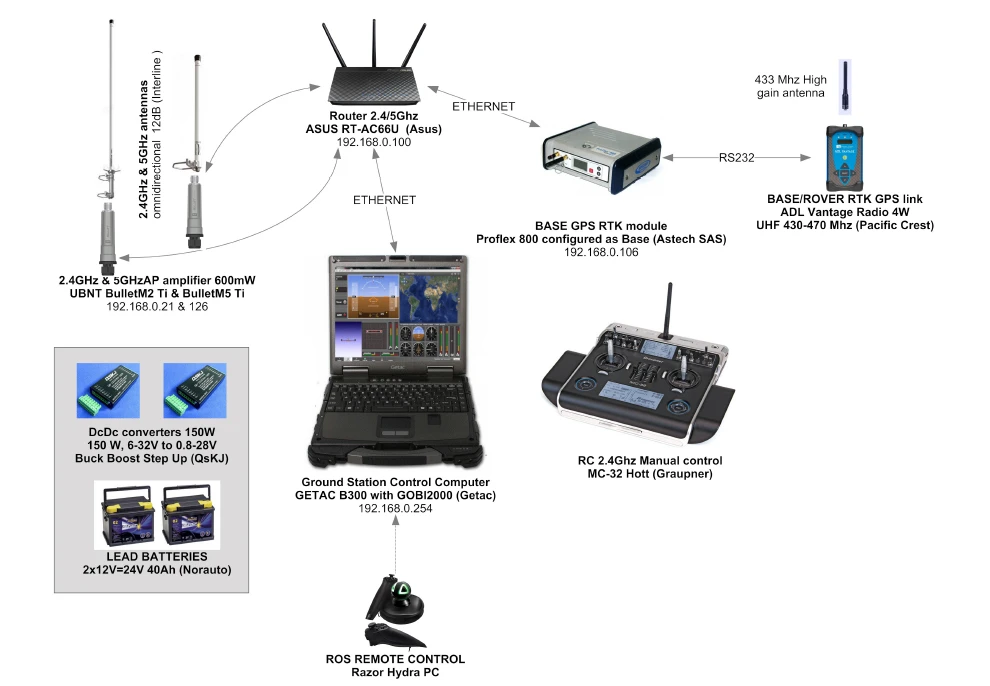
Riverwatch is controlled by means of a web-based application that operates in one of two modes. For line-of-sight distances of less than one kilometer (0.62 mi), the control uses a direct wireless link. For longer distances, the link is over the internet using GPRS or 3G using a file-sharing system, such as DropBox.
Field trials for Riverwatch were conducted at a private lake in Portugal’s Sesimbra region, where the two robots were tested in autonomous and tele-operated modes over an area of about 1.5 square kilometers ( 0.5 square mi). The area was chosen because of its variety of vegetation environments from overgrown, shallow passages to wide-open expanses of deep water.
According the the Riverwatch team, the next step in the program will be to develop a fully autonomous system that can charge the UAV from the ASV, conduct a full evaluation of the landing algorithms used by the hexacopter, and develop a recovery mechanism to allow the UAV to land in bad weather.
The video below outlines the Riverwatch program.
Source: Riverwatch






