

Assembling IKEA furniture is perhaps not the most popular of past times, but homemakers could soon gain a helping hand from a dexterous new robot. Developed at the Nanyang Technological University (NTU) in Singapore, the machine has already demonstrated an ability to put together an IKEA chair by itself, with its creators now setting their sights on other applications that require human-like manipulation of objects.
How long would you give yourself to assemble an IKEA chair? It might depend on how handy you are and what type of chair, but anything around 20 minutes is a pretty respectable time by our reckoning. That's the time posted by NTU's new robot, which is built using off-the-shelf components. Confronted with IKEA's solid wood Stefan chair, the machine spent 11 minutes and 21 seconds planning motion pathways, three seconds locating the parts and then 8 minutes and 55 seconds in assembly mode.
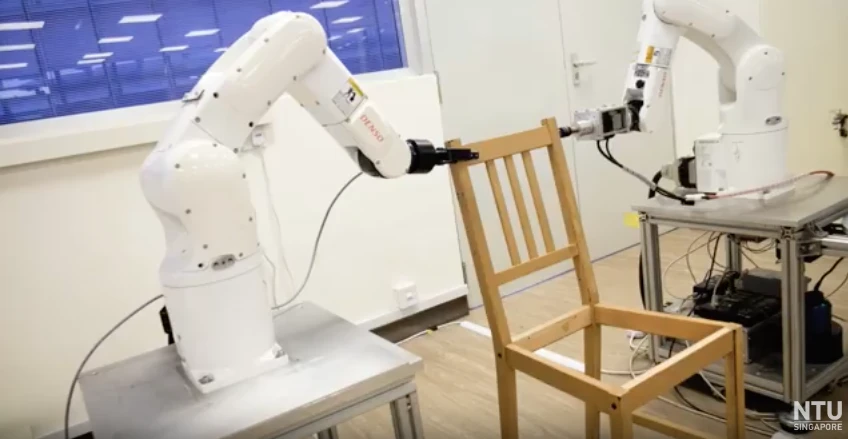
Guided by algorithms coded by its developers, the robot's main physical components include a 3D camera, parallel grippers on the end of industrial robotic arms capable of six-axis motion, and force sensors mounted on the wrist. Together, these are meant to recreate the human ability to handle and put together intricate objects.
The process starts with the robot taking 3D photos of the different parts, which had been laid out on the floor to mimic the mess us humans create when we open a box from IKEA. After creating a map of the positions of the different parts, the robot then used a two-handed motion to gather the pieces, and force sensors to determine the level of pressure to apply, neatly slotting dowels into holes and putting the chair together piece by piece .
"For a robot, putting together an IKEA chair with such precision is more complex than it looks," says Assistant Professor Pham Quang Cuong, who designed the robot with his team from NTU's School of Mechanical and Aerospace Engineering. "The job of assembly, which may come naturally to humans, has to be broken down into different steps, such as identifying where the different chair parts are, the force required to grip the parts, and making sure the robotic arms move without colliding into each other. Through considerable engineering effort, we developed algorithms that will enable the robot to take the necessary steps to assemble the chair on its own."
From here, the team is working to equip the robot with advanced artificial intelligence so that it can assemble the chair simply by looking at the instruction manual or an already finished example. It is also working with companies to put its manipulation abilities to use in applications like glass bonding for the automotive industry and drilling holes in metal parts for aircraft, dexterous tasks that industrial robots have traditionally not been well-suited to.
"One reason could be that complex manipulation tasks in human environments require many different skills," says Cuong. "This includes being able to map the exact locations of the items, plan a collision-free motion path, and control the amount of force required. On top of these skills, you have to be able to manage their complex interactions between the robot and the environment. The way we have built our robot, from the parallel grippers to the force sensors on the wrists, all work towards manipulating objects in a way humans would."
You can see the robot at work in the video below, while the team's work, which took three years, was published in the journal Science Robotics.
Source: Nanyang Technological University





