





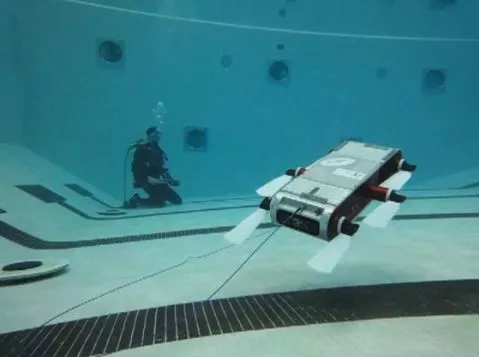
Several years ago, a joint team from Canada’s York, McGill and Dalhousie universities created AQUA, an underwater swimming robot. AQUA has six flippers, three on each side, and uses them to paddle through the water – it’s somewhat reminiscent of a platypus, albeit a six-legged one. Using a different set of appendages, it can even swim underwater, then proceed to sort of slap its way onto and across dry land. All of this is very cool in and of itself, but the little robot now has a new ability: it can receive commands visually underwater, thus freeing it from cumbersome umbilical cords.
A team from York’s Centre for Vision Research created a computerized controller, the AQUATablet, that is watertight down to 60 feet (18.29 meters). Divers enter commands for the robot into the tablet-style device, using toggle switches and onscreen prompts. Those commands appear as barcode-like tags on its screen. The screen is then shown to the robot, which reads the tags with its onboard front camera, then proceeds to carry out the commands.

Using a relatively thin connecting optical cable between controller and robot, divers can also control AQUA in real time simply by moving the AQUATablet, as its accelerometer translates movements into directional commands – turn the controller left and the robot goes left... you get the picture. A feed from the robot’s cameras appears on the screen, giving users a first-person view of what’s happening.

Previously, divers have used pre-made laminated Flash cards to instruct underwater robots, but the AQUATablet allows them to make up commands as they go. "It's impossible to anticipate everything you're going to want the robot to do once you get underwater,” said York’s Prof. Michael Jenkin. “We wanted to develop a system where we could create commands on the fly, in response to the environment.”
AQUA was designed for collecting data in tight and/or hazardous areas, such as shipwrecks, saving human divers from having to do so. Although the controller is limited to a depth of 60 feet, the robot could proceed to operate another 30-40 feet deeper, allowing the operator to remain at a shallower, safer depth.


