






Some of the most advanced work in autonomous aerial robotics is not done by DARPA, or by massive corporations. Rather, it is accomplished by teams of university students who participate in the International Aerial Robotics Competition (IARC). For the past 23 years, the IARC has challenged college teams with missions requiring complex autonomous robotic behaviors that are often beyond the capabilities of even the most sophisticated military robots. This year's competition, which was held in China and the United States over the past week, saw the team from Tsinghua University in Beijing successfully complete the current mission – an elaborate espionage operation known as Mission Six.
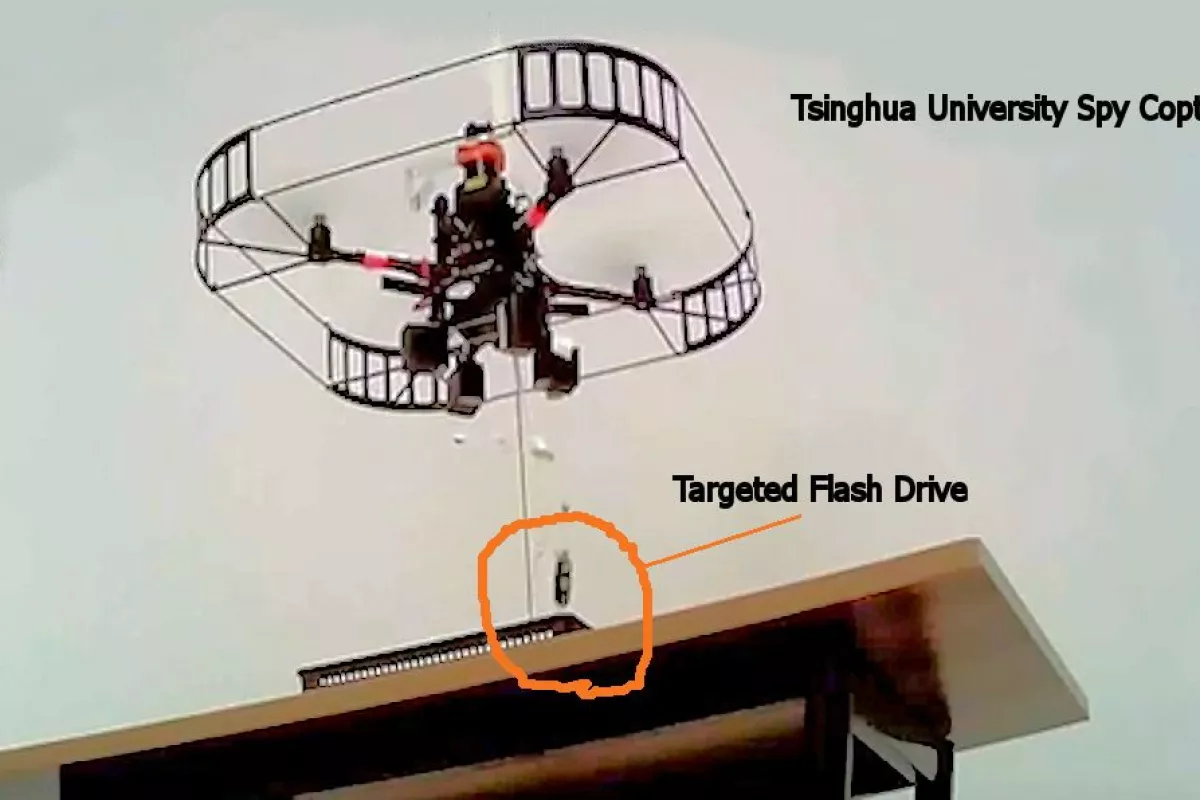
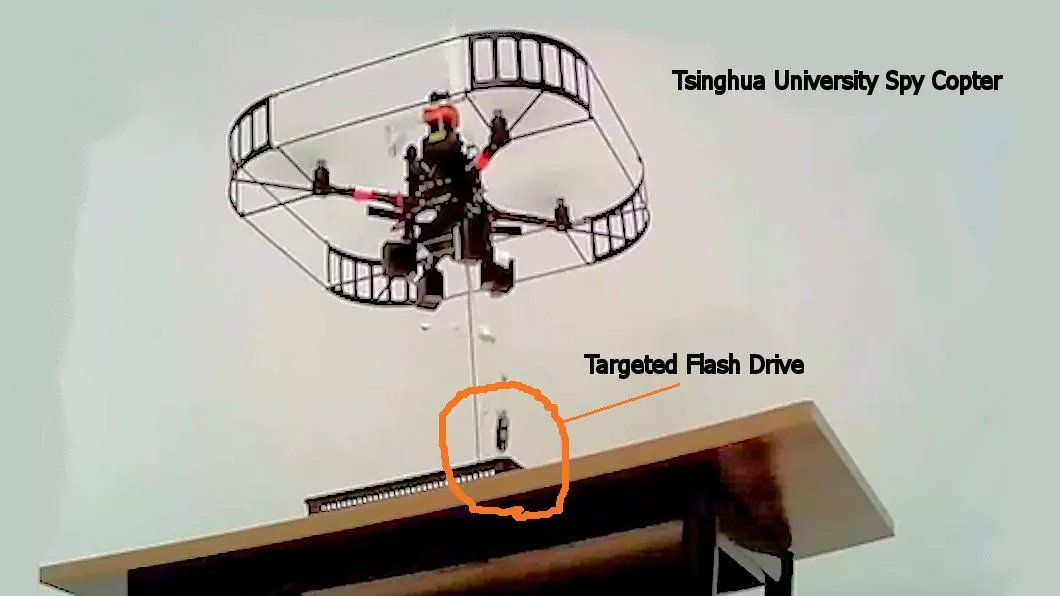
First proposed in 2010, the Mission Six scenario is that an enemy has plans for taking control of the Eurasian banking system, a move that could throw the entire world into chaos. This plan is contained in a USB flash drive located in a remote security office of the enemy's intelligence organization.
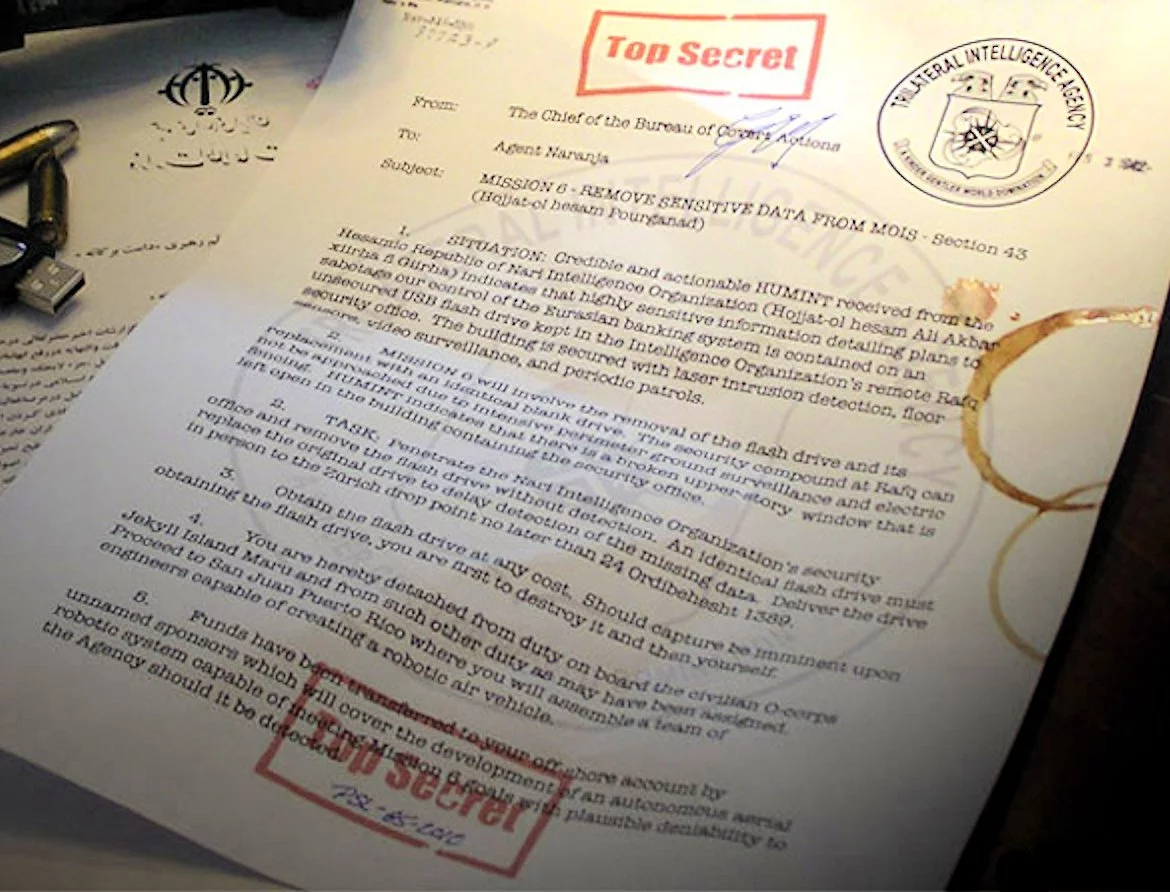
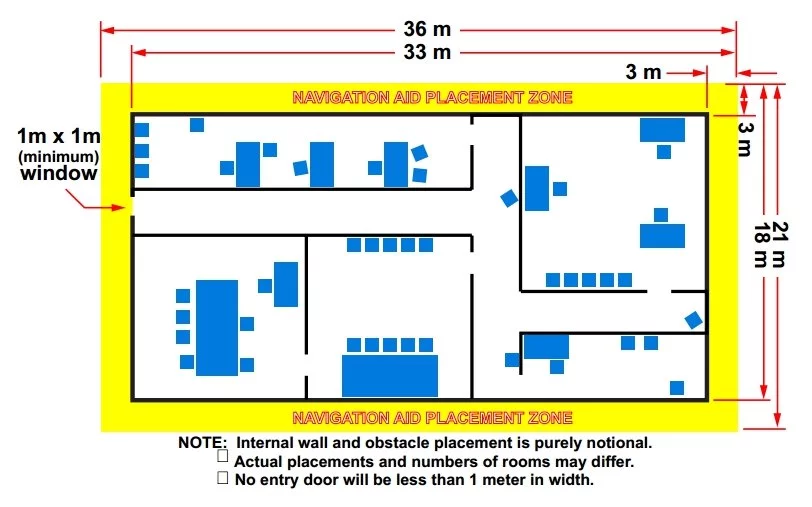
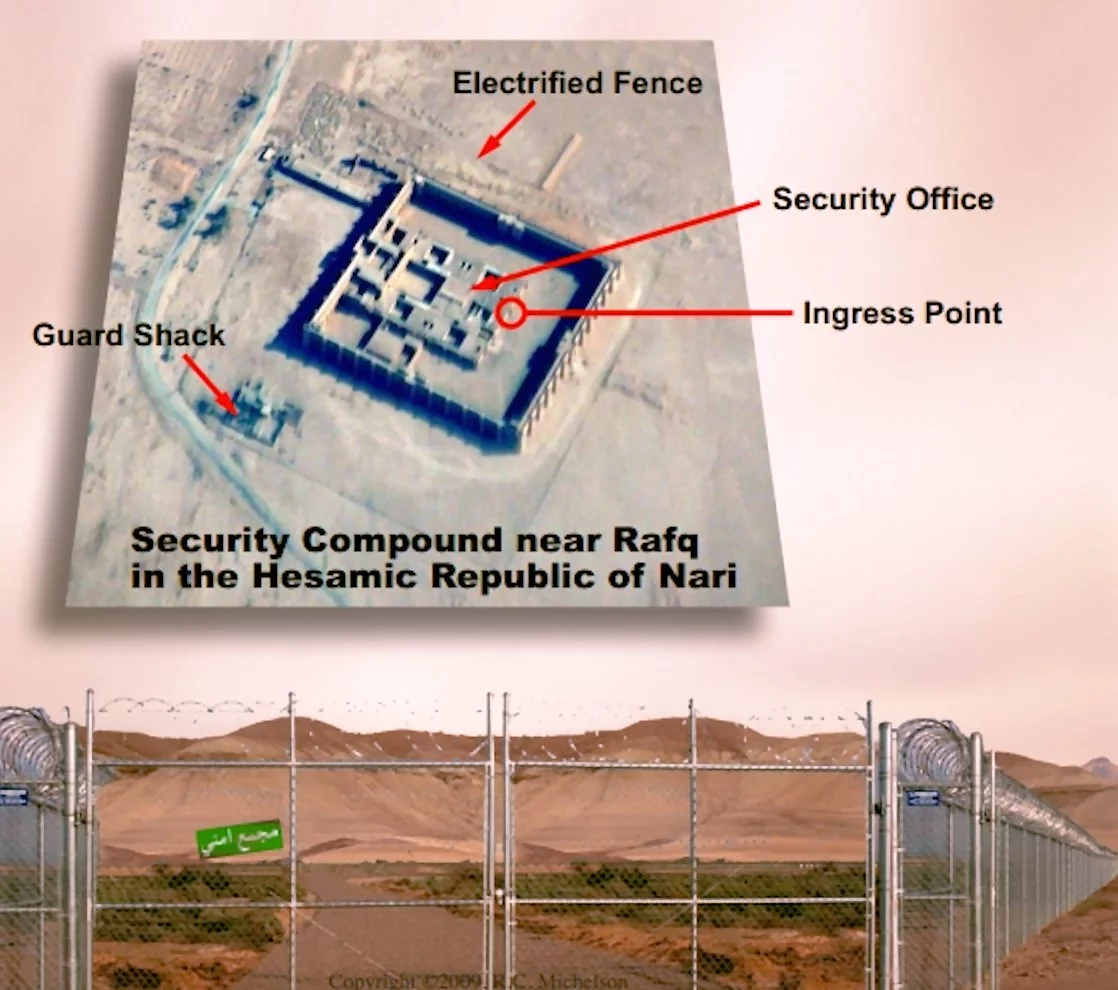
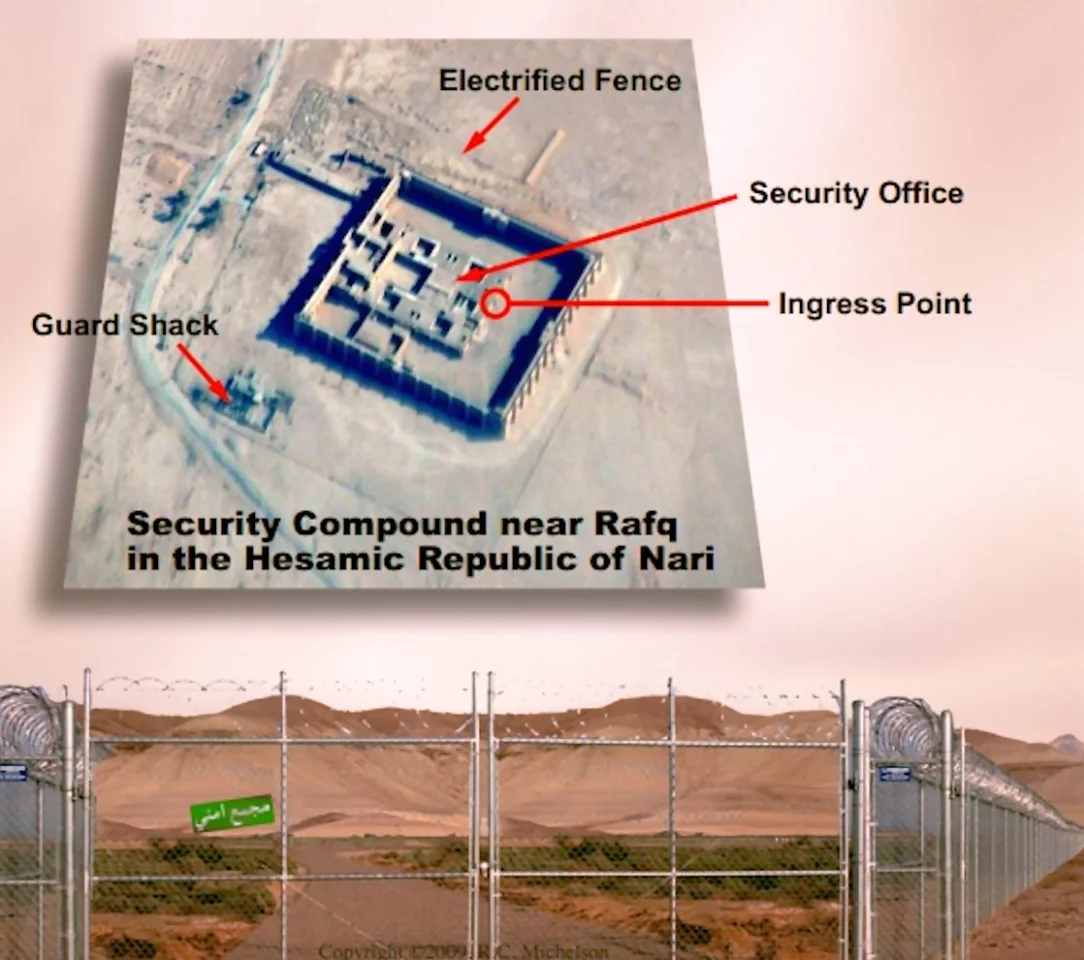
The target building has a broken window on the same floor as the security office. This building measures roughly 15 x 30 meters, and is equipped with laser intrusion detectors, floor sensors, video surveillance, and periodic patrols. Mission Six calls for covertly capturing the flash drive, and replacing it with another of the same make to postpone discovery of the theft. Recognizing signs directing visitors to the security office is a part of the challenge. The mission must be carried out within ten minutes to avoid security patrols.
The vehicles are required to be completely autonomous, with no external commands accepted during the mission. The vehicles can be of any type (as long as they fly), must weigh less than 1.5 kg (3.3 lb), and be no more than 1 meter (3.28 ft) in the largest dimension. Most competing teams chose to base their vehicles on quadrotor designs. However, some chose other designs, including birotor and more unusual designs, such as the entry below from Pima Community College in Arizona that includes a balloon above a set of rotors to increase stability.
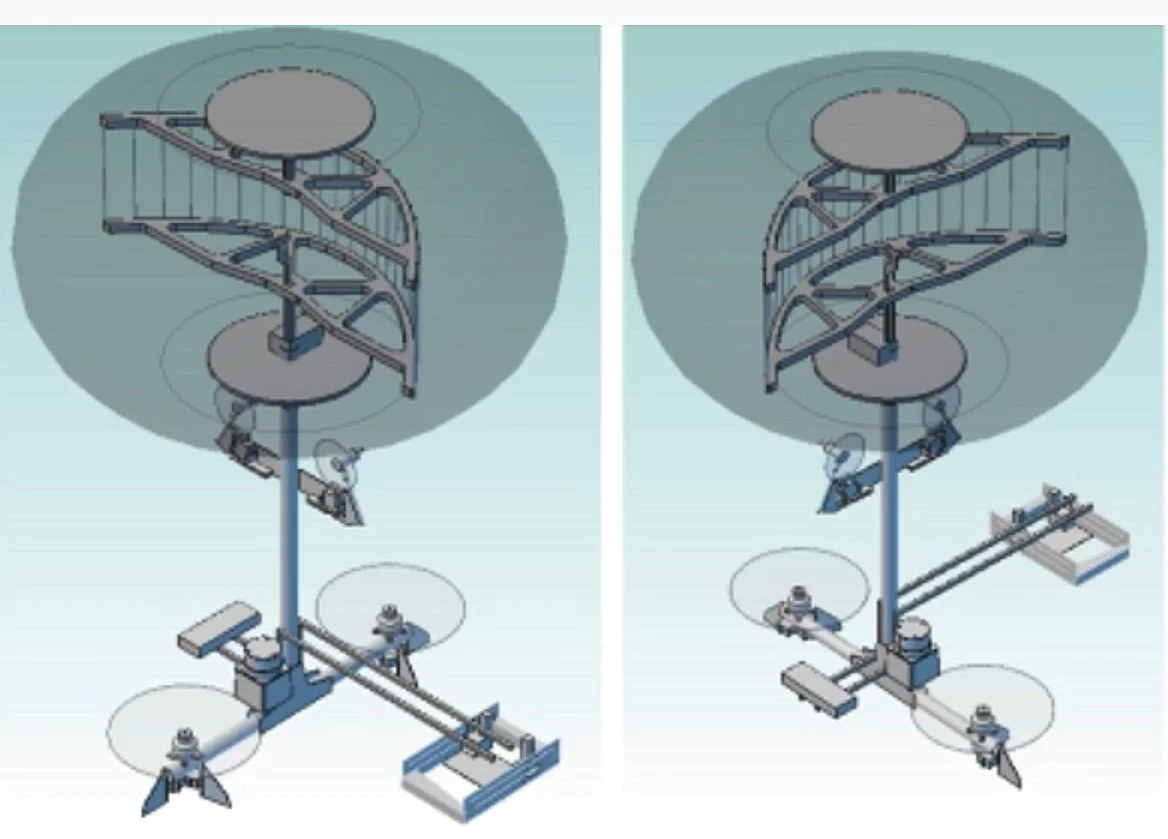
All vehicles must contain their own power supplies. The vehicle is required to sense its immediate surroundings, and decide on its own actions, but need not contain its control computer – it can instead be linked to an external computer by radio. While external navigation aids are allowed, GPS locating is not.
That's quite a challenge to say the least, and the Michigan Autonomous Aerial Vehicles team, which is associated with the University of Michigan, had been touted as the most likely entry at the American venue to succeed with Mission Six. Unfortunately, they encountered a perfect storm of equipment malfunctions, and were unable to complete the mission.
The remarkable performance of the Tsinghua University entry in completing Mission Six in under 9 minutes can be seen in the video below.
Source: AUVSI Foundation


