

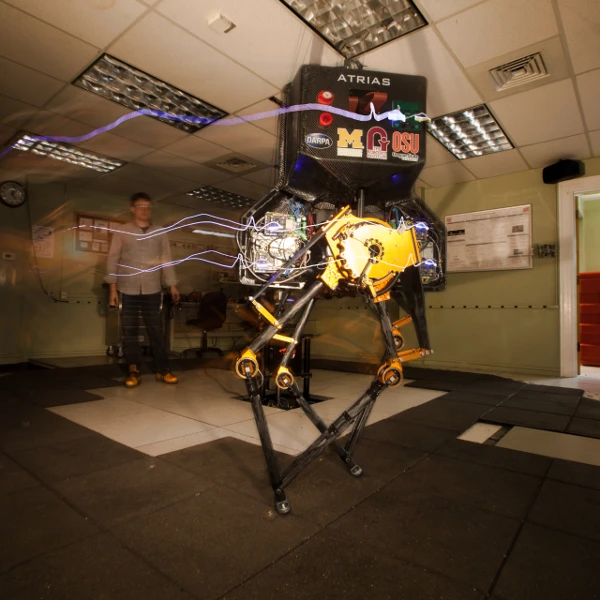




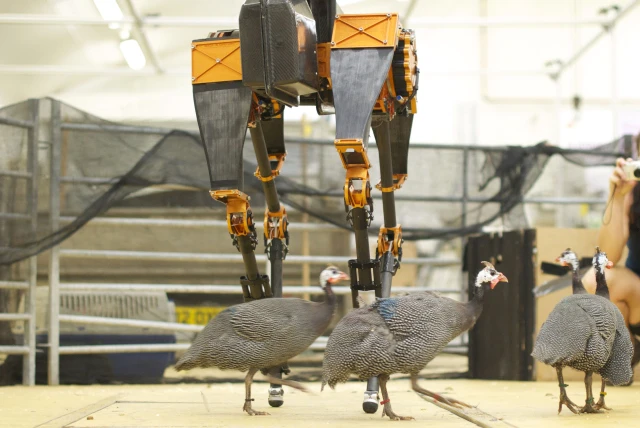
The great tradition of designing robots inspired by the many beautiful forms of locomotion seen in the animal kingdom likely predates robotics itself, arguably stretching all the way back to Michelangelo's time. Standing on the shoulders of such giants is ATRIAS, a series of human-sized bipedal robots that remind us of other two-legged creatures like the ostrich or emu.
ATRIAS is a project of Oregon State University's Dynamic Robotics Laboratory built to research the science of walking and running with the ultimate goal of creating a robot that can make its way over rough terrain while "standing." The ATRIAS design is based around two spring-loaded legs similar to that of a pogo stick, but rather than causing the robot to bounce around, its springy legs act as both a suspension system and storage mechanism for mechanical energy, theoretically making it more agile and efficient.
ATRIAS seems a bit goofy at first. It has no real feet to speak of, just the small end points of its legs, and it "stands" by basically walking in place, so it's almost always moving.
The team behind ATRIAS compares it to a sports car, in that all its mechanisms are designed and tuned to work together for maximum performance. But like many fast cars, the creators also concede that the robot isn't easy to control. Because it is designed to be as close to a simple spring-mass system as possible (ATRIAS stands for "Assume The Robot Is A Sphere), the mathematics typically used to control robot walking don't work for it, requiring researchers to invent new controllers as they go.
The goal of ATRIAS isn't just to create a walking robot, but to create one that is better at reacting and recovering from unexpected obstacles. As you can see from the video below, ATRIAS holds its own against a barrage of dodge balls, failing only when its emergency shut-off button is accidentally struck by a ball. With a little more engineering, it seems easy to imagine ATRIAS making one heck of a goalie some day.
In addition to the Oregon State lab, prototypes are also in use in research at the University of Michigan and Carnegie Mellon University in Pennsylvania.
For a closer look at ATRIAS, the team behind it will be demonstrating at the DARPA Robotics Challenge in southern California in June.
Source: Oregon State University





