















We've looked closely at the on track action at the recent 2015 DARPA Robotics Challenge, but there's a lot more to the story. Gizmag went behind the scenes to explore the "garage" where the teams tended their sophisticated charges in order to learn more about what makes the world's most advanced robots tick.
The 2015 DRC Final brought teams together from all over the world as part of DARPA project to produce robots that could help responders in the event of disasters, such nuclear accidents. Last week at Fairplex in Pomona, California, about 10,000 people watched them take on a series of tasks from driving a car to operating a switch with varying degrees of success punctuated by falls that went viral on the Internet.
However, behind every great robot is a team of roboticists – in this case, linked to their charges from control centers in a garage a quarter of a mile away by a deliberately degraded communications system. Off limits to the public, this re-purposed exhibition hall also acted as workshop and de facto home for the engineers and their automata.

"Garage" may conjure up images of a cramped structure made out of breeze blocks and stinking of motor oil, but in this case, it was a clean, well-lit building with an arched roof that gave it the look of an oversized, air-conditioned Nissen hut. Inside, the open floor was divided into bays by tall dividers and instead of pistons and 10W40 there were circuit boards and hydraulic fluid.
The open plan was both practical, since ATVs had to be able to drive in to collect the robots to take to the competition area, and symbolic of the purpose of the DRC to encourage collaboration and communications between the international teams. That may seem a bit odd, since DARPA is a defense agency that routinely handles classified research, but program manager Gill Pratt told us that disasters are common to all, so, unlike other projects, the DRC had no obvious security concerns.
The robots in the competition broke down into several categories. Most were humanoid, some were non-humanoid, and a few were hybrids. Though many of the robots were custom built by their teams, some opted for the Atlas robot built by Boston Dynamics that provided as a common platform for the competition. Because of the Atlas, the garage actually held 25 teams; the 24 competitors plus a Boston Dynamics team to provide technical support and a spare Atlas in case a "transplant" was needed.

For many of the teams, the garage was more than figurative home as they spent 24 hours a day there in preparation for the challenge; sleeping on sofas and eating catered food in great chafing dishes. Even in so spacious a building the clutter of packing crates, work tables, luggage, and robot handling cranes made many of the bays into cramped quarters. Some even included mock up doors, stairs, and switch panels for the robots to practice on.
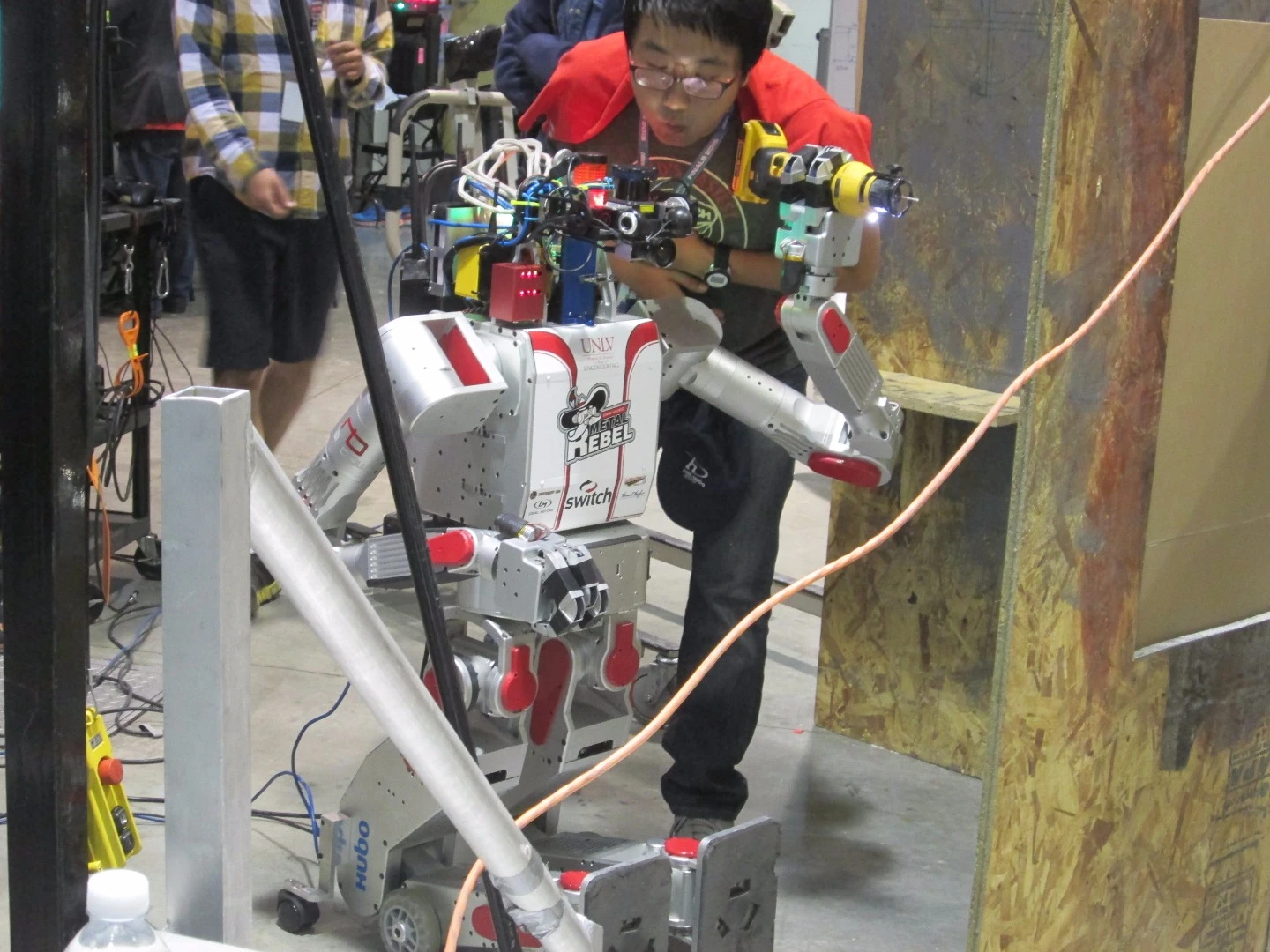
In all, the atmosphere throughout the competition was excited, collegiate, and about what you'd expect in a crowd of young, motivated engineers doing something unprecedented, yet under the heavy pressure of time restraints. Some were totally concentrated on the task at hand, some were keen to chat with us, and a few stood with long faces over robots that simply failed to function properly.
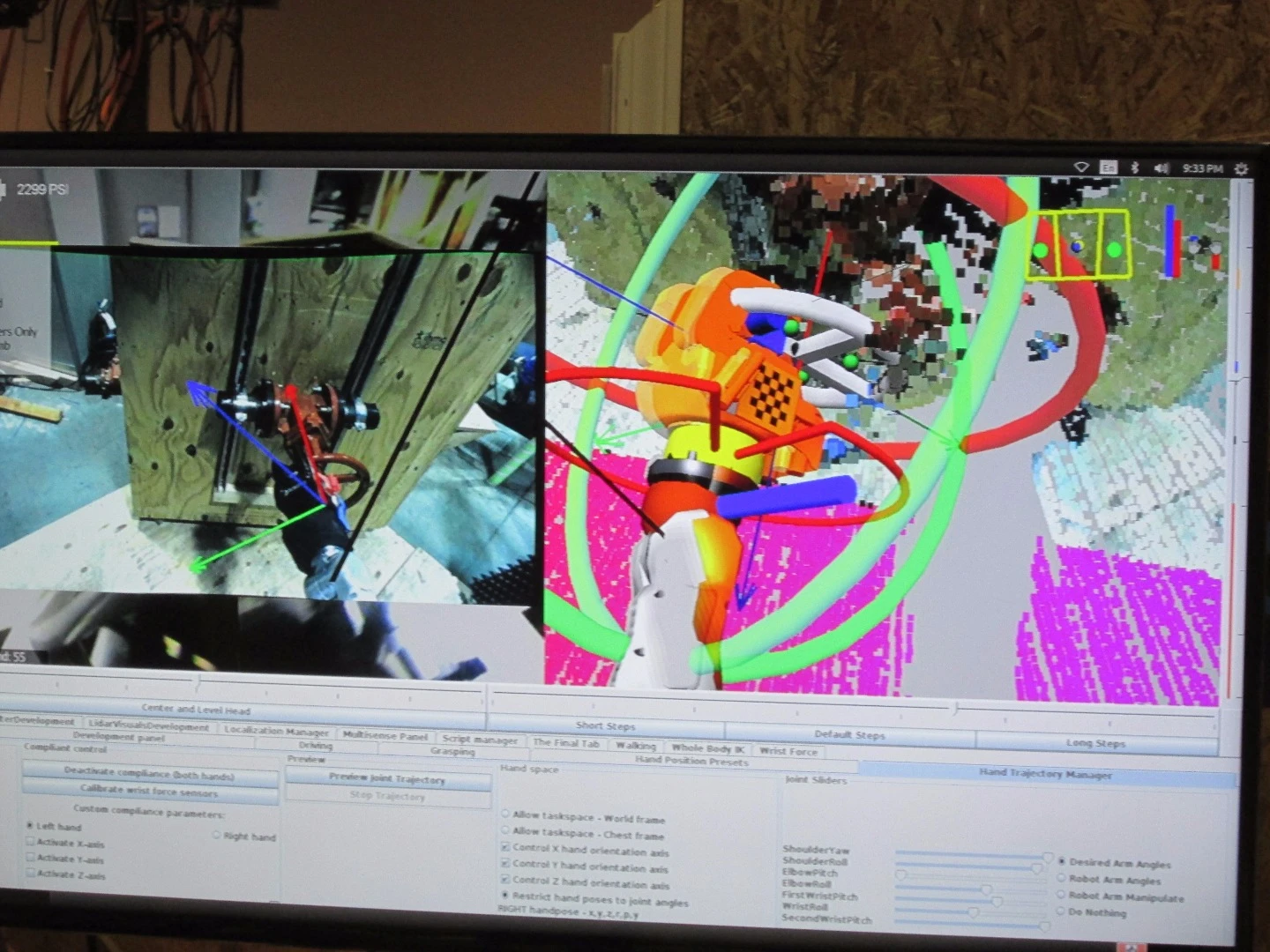
As we talked with some of the teams, the competition was still ongoing and we were reminded that the teams in the garage weren't just doing maintenance on their robots there – they were controlling them as well. Under the rules of the competition, each team had to control its robot from the garage using a degraded communications link that restricted bandwidth, introduced latency, and occasionally interrupted transmissions. Because of this, each team had to devise a control software that took this into account, as well as programming the robot with a high degree of autonomy. Every now and again we'd hear how well this worked as a team would let out cheers or groans, depending on the outcome.
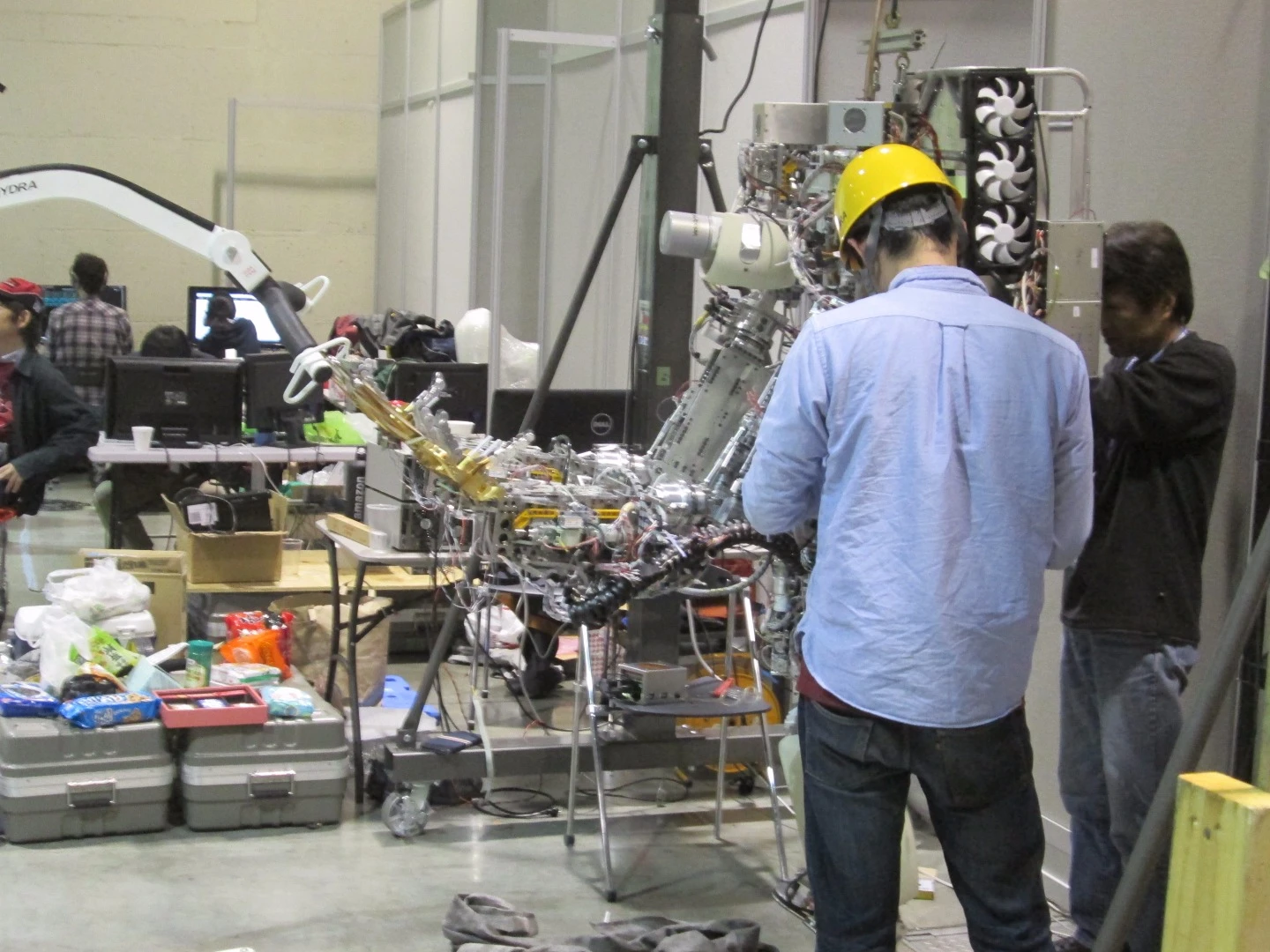
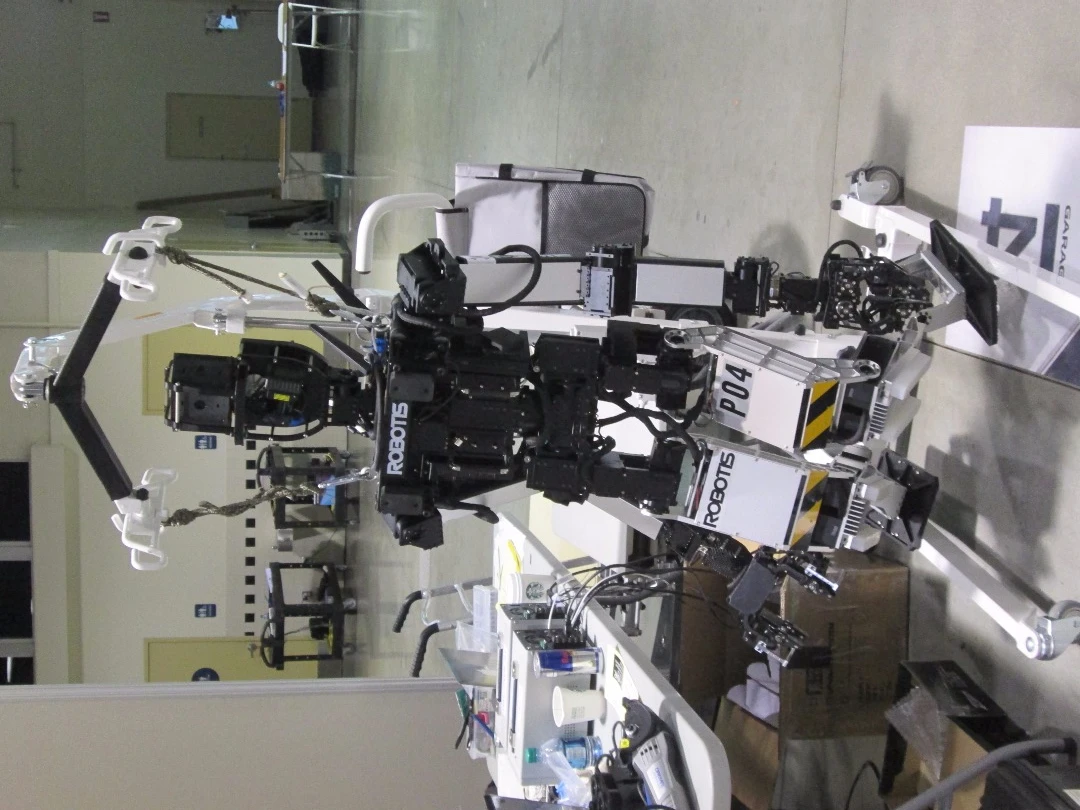
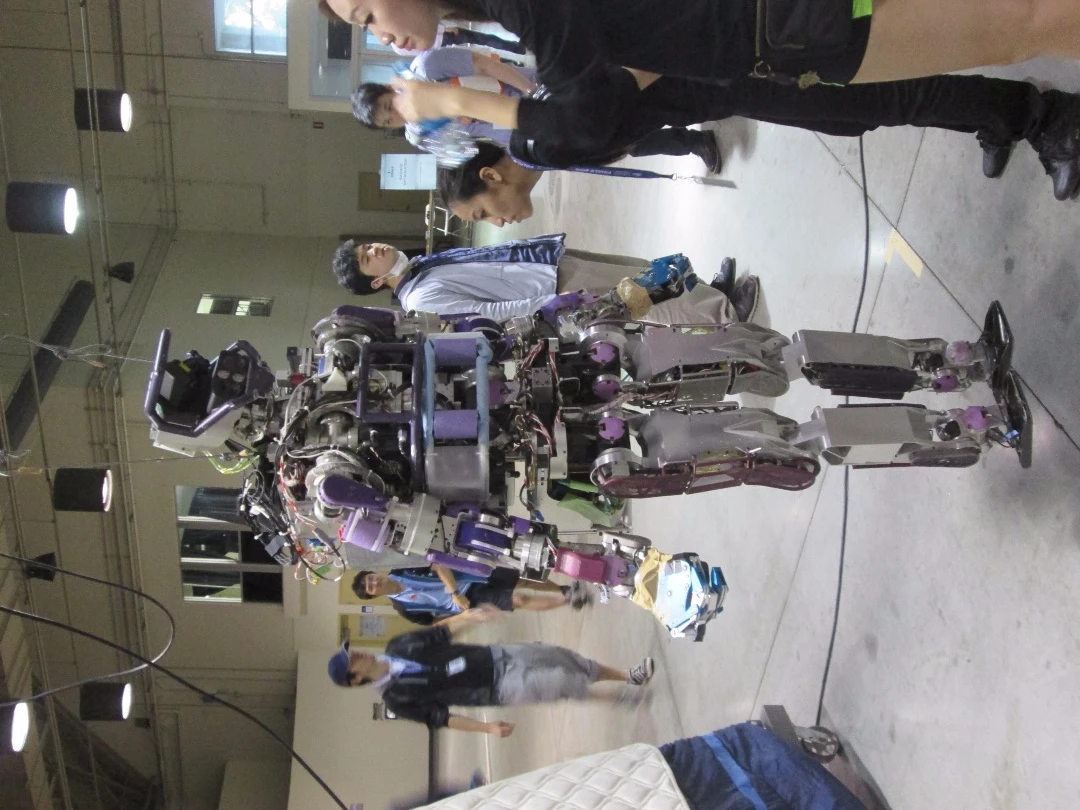
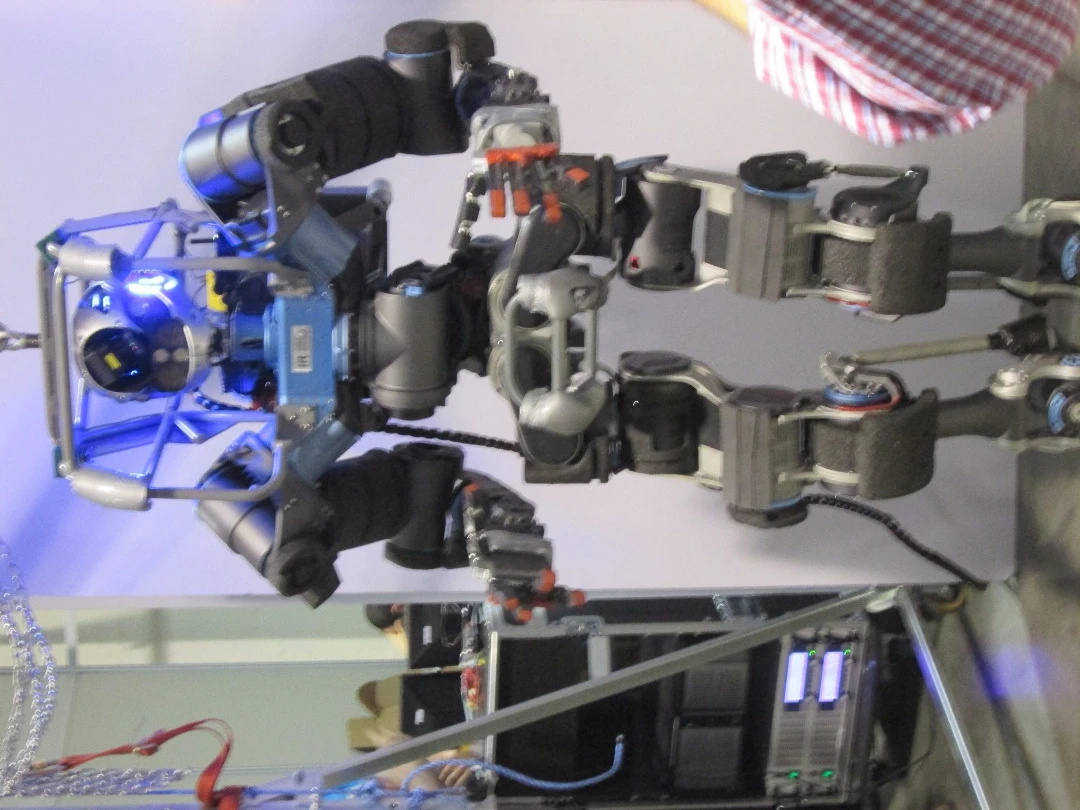
Walking around the garage, we could see some of the competitor robots or their backups. There was Hydra, which was built by the University of Tokyo and was the only one of the 24 teams not to compete due to last minute technical problems. Then there was Aero, which was a centaur-like robot with a humanoid torso sitting atop four legs, and an even more non-humanoid robot in the form of the Jet Propulsion Laboratory's Robosimian, which looks like a cross between a monkey and an octopus. We saw Robosimian undergoing pre-competition tests as it practiced tasks, such as throwing switches or navigating inclines. And, of course, there was DRC-HUBO from Team KAIST – the humanoid hybrid robot that won the first prize.
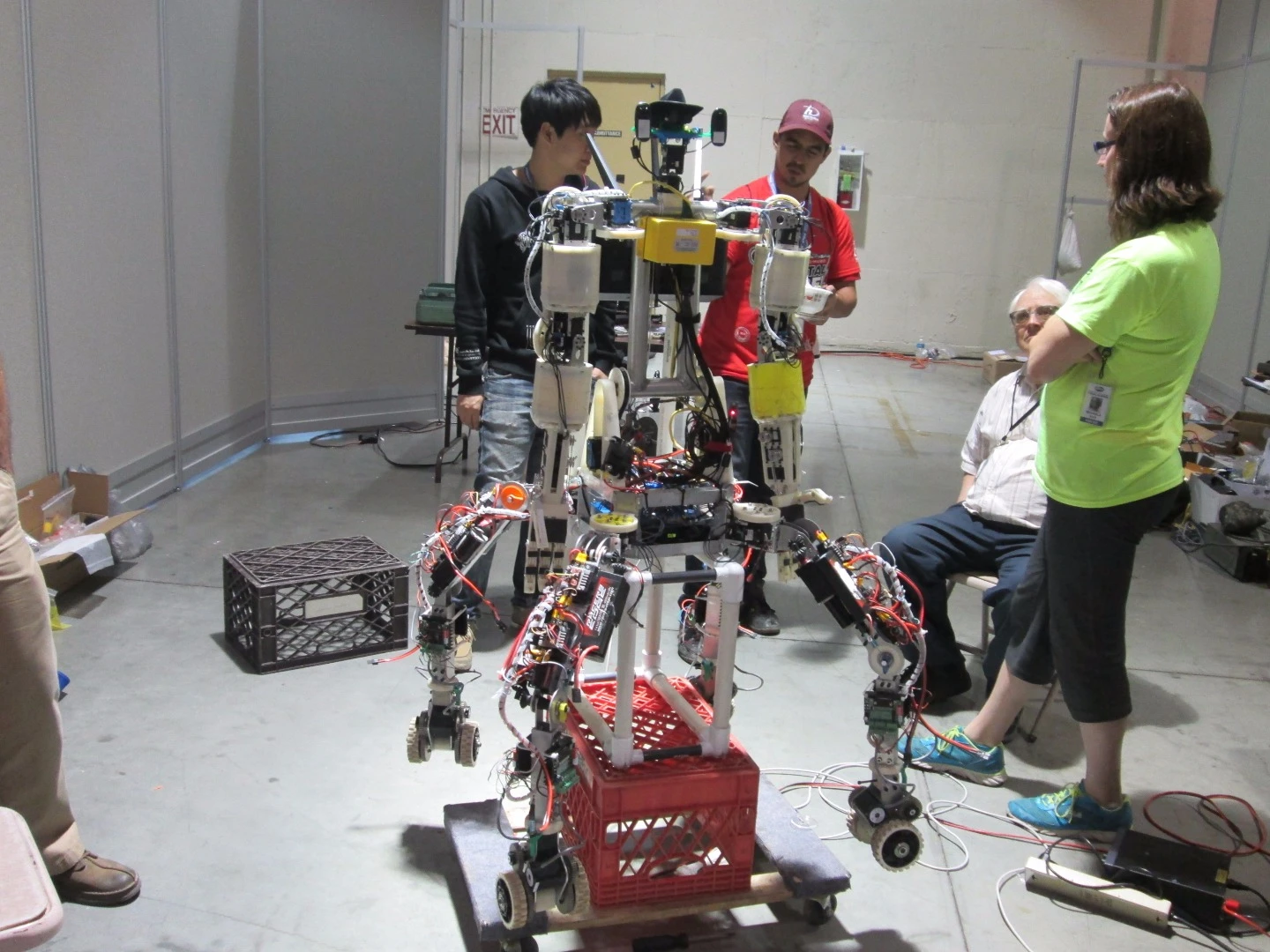
One robot we found of particular interest was Team Grit's Cog Burn. This quadruped robot built on a shoestring budget in less than two months by a volunteer team led by Karl Castelton was one of the early casualties of the competition. On day one it failed to complete the first task when it was unable to walk across sand, though team member Chris Williams says that it wasn't the sand that defeated it, but software, which had plagued the robot's development for weeks.
Cog Burn started out with a completely different pair of legs using a newly designed set of 3D-printed nested gears, whose only fault was that they wouldn't work properly. Lacking time and resources to redesign the gears, the team had three weeks to build a new set using off the shelf computerized motors from Robotiq combined with 3D-printed components, such as additional bracing. The result was a bread board electronics lashup that they couldn't get to work right because each motor had to be networked with the others and glitches kept appearing.
"We're using arduinos to control all our individual motors," says Williams. "We have three joints per leg, which means 12 arduino controllers. We're using I-squared-C to communicate between them and we're having I-squared-C issues. It's a local networking problem."
When asked about the atmosphere between the teams, Williams said: "It's very light… We're not competing against one another, we're competing against ourselves."
We also spoke to John Seminatore of Virginia Tech's Team Valor, whose six-week old ESCHER robot suffered a broken wrist in a fall the first day, which prevented it from completing the door task. We asked him about the "surprise" task that was a key part of the competition and how his team handled it.
"The hardest part about that is the degraded communications," said Seminatore. "It's not immediately obvious to the audience, but the operator station can't tell the robot to operate because there's so much latency, so the real challenge is to have enough tools at your disposal, such as pre-planned motions, so that the robot can adapt to what's going on."
Despite the fall setback, Seminatore regards ESCHER as a success because the team was concentrating on getting the robot to walk 200 ft (61 m) instead of doing the drive task and managed it on the second day of the competition. ESCHER will be used in Virginia Tech's next phase of its firefighting robot project.
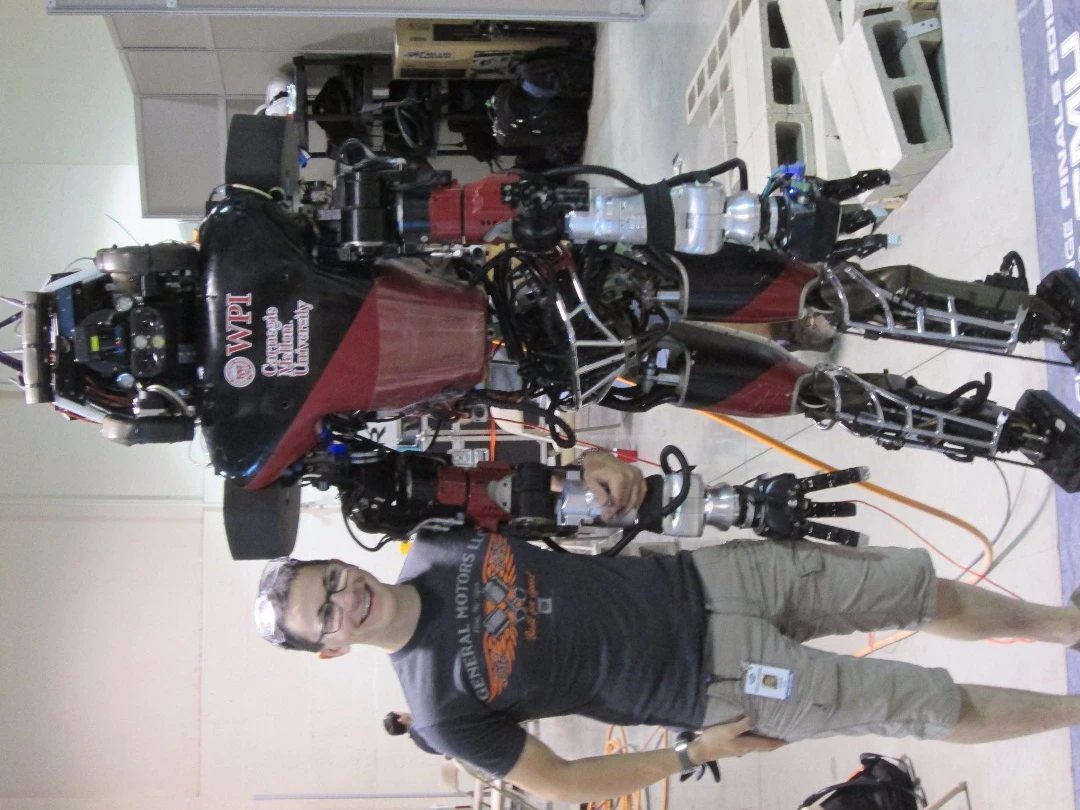
The final scores in the 2015 DRC Finals saw Team KAIST taking the US$2 million first prize with 8 points and a time of 44:28. Second was Team IHMC Robotics's Running Man robot with 8 points and a time of 50:26. Tartan Rescue's Chimp, which won the first day of competition, came third with 8 points and a time of 55:15.
For more information, visit the DRC site.






