

French researchers and the scanning project responsible for the recent discovery of a large void in the Great Pyramid of Giza have joined forces to develop a new robot exploration platform. The current focus is on developing a two robot platform capable of looking into and mapping inaccessible areas of ancient buildings without blowing through doors and walls to do so.
The minimally invasive robotic exploration project team is made up of scientists from France's Inria research institution and CNRS (National Center for Scientific Research), engineers from Cairo University and the HIP Institute. Its aim is to develop a new robot platform capable of exploring the inner reaches of old buildings and archeological structures while causing as little damage as possible.
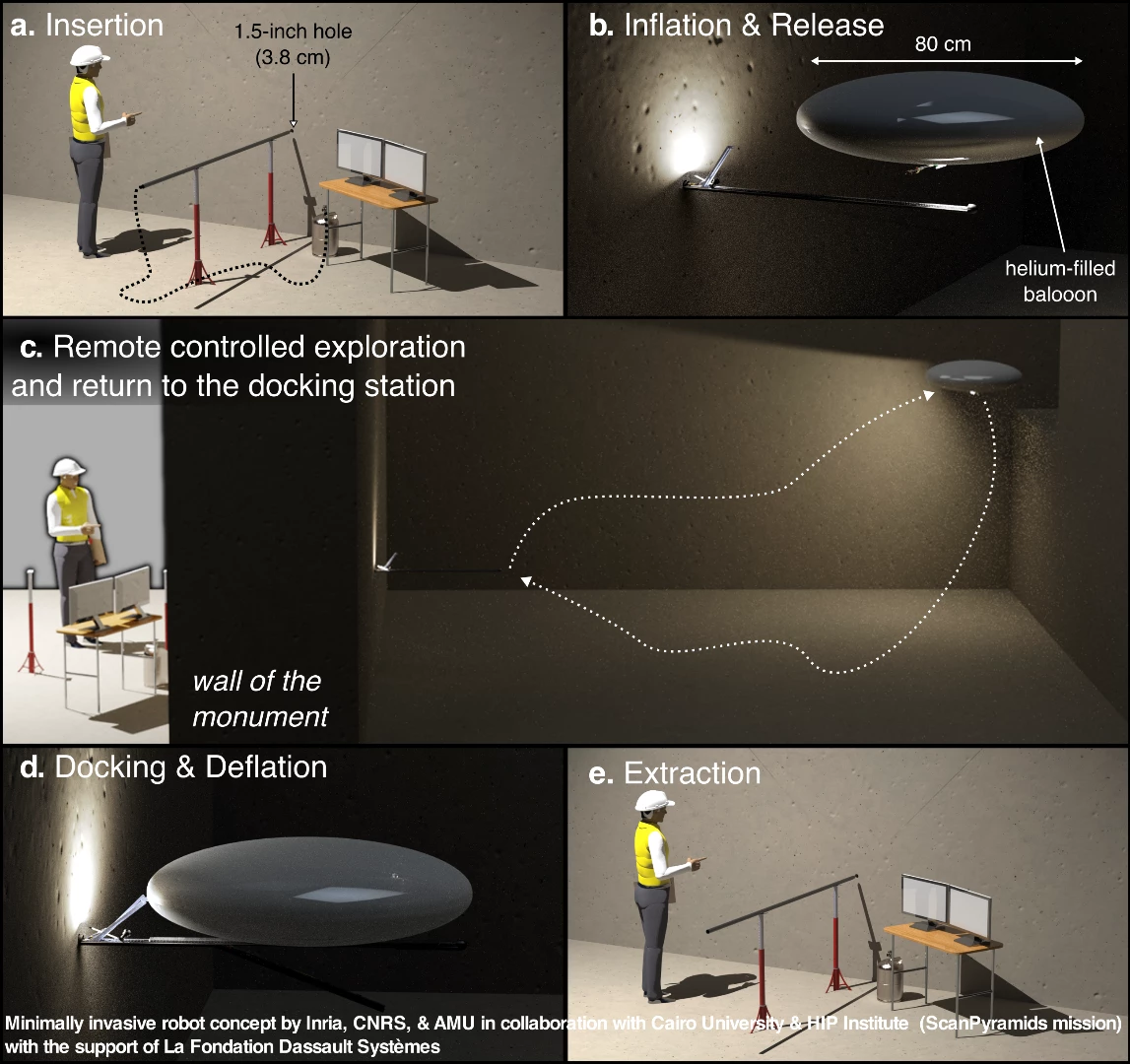
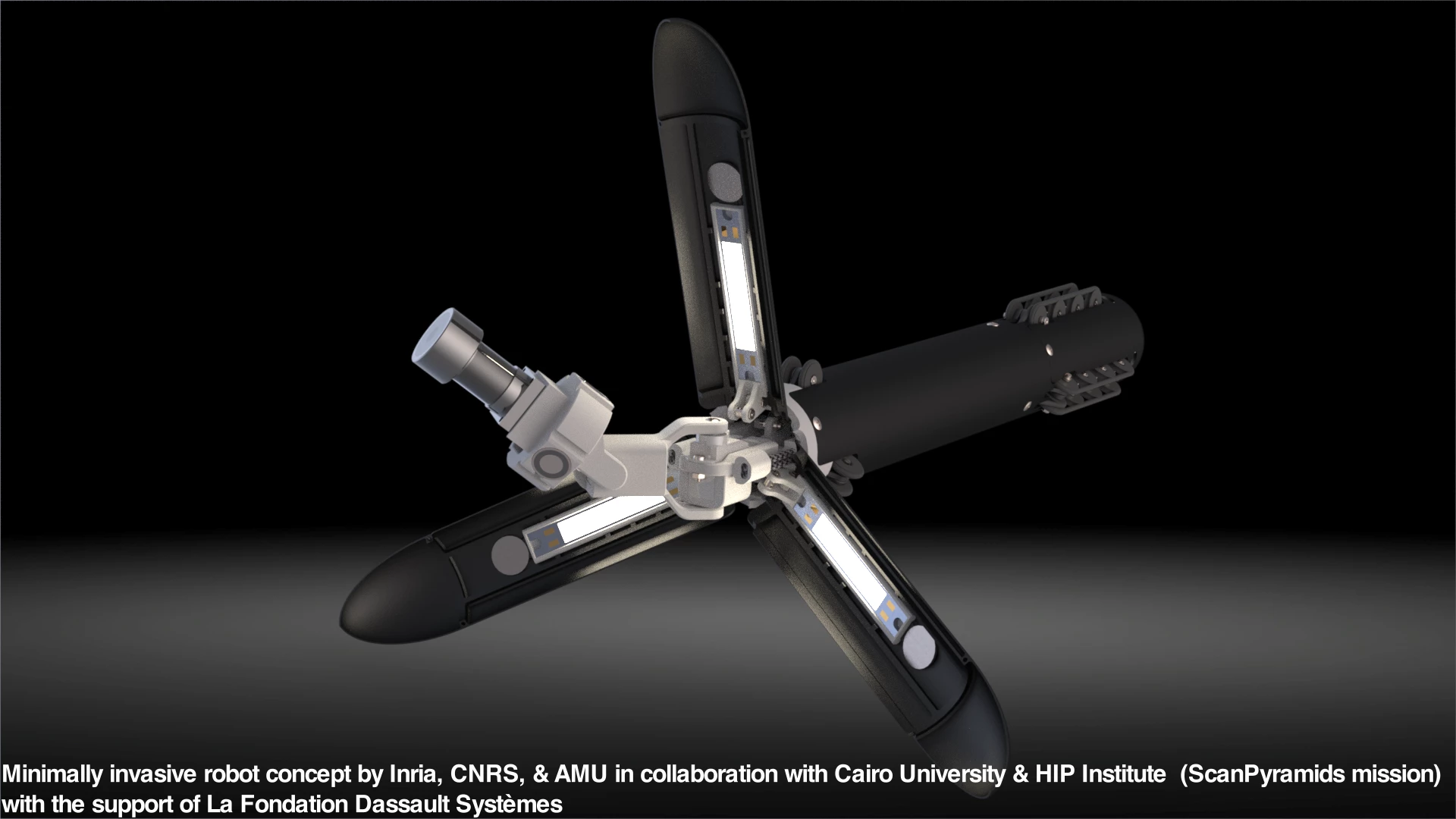
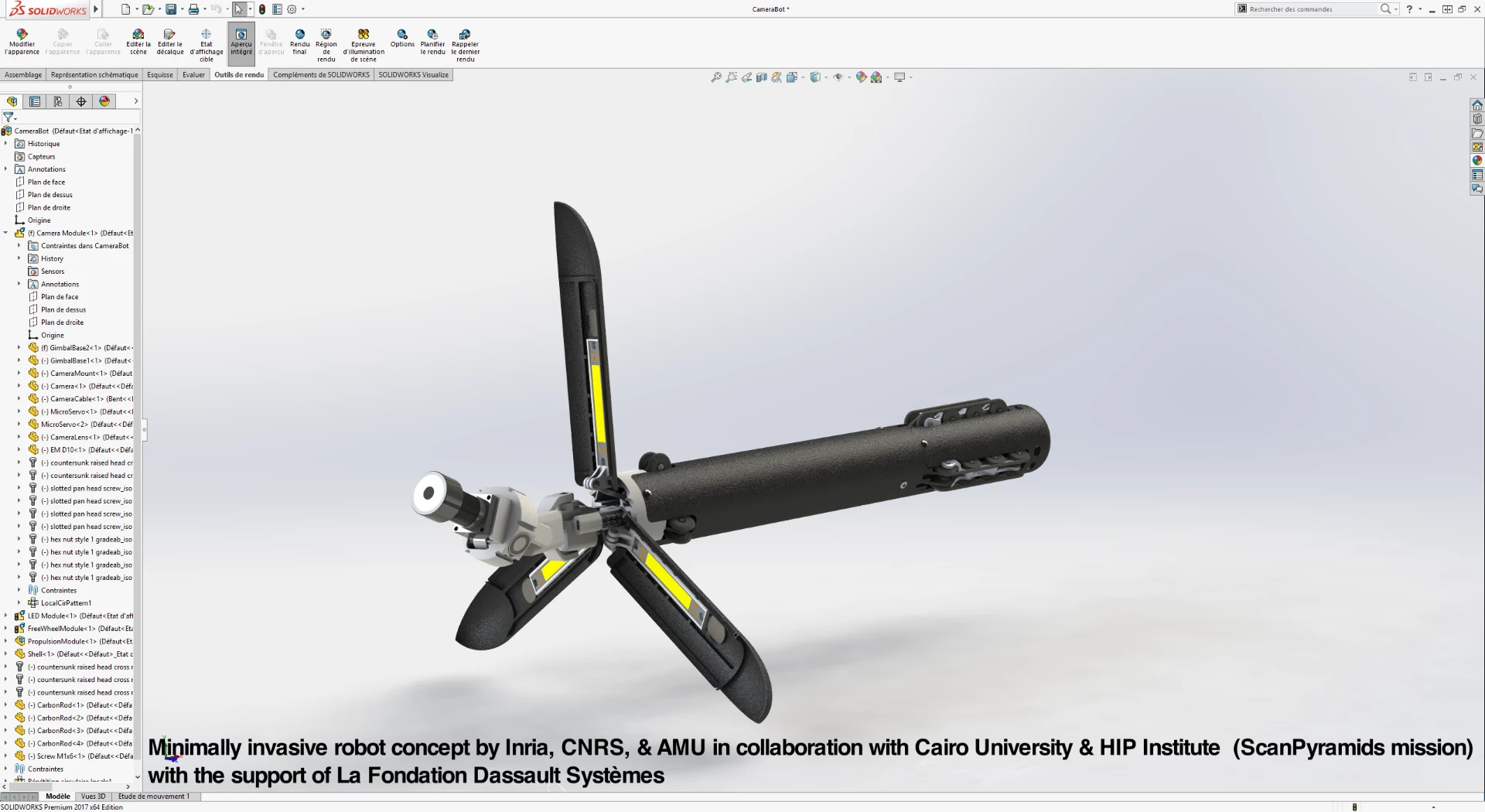
The basic idea is to drill a small hole, under 3.5 cm (1.5 in) in diameter, into a wall or door. Researchers would insert a tubular robot through the hole, which would then deploy an omnidirectional high resolution camera that would allow them to peek inside inaccessible places. If the space looks promising, a second robot would be fed through the same hole in the wall.
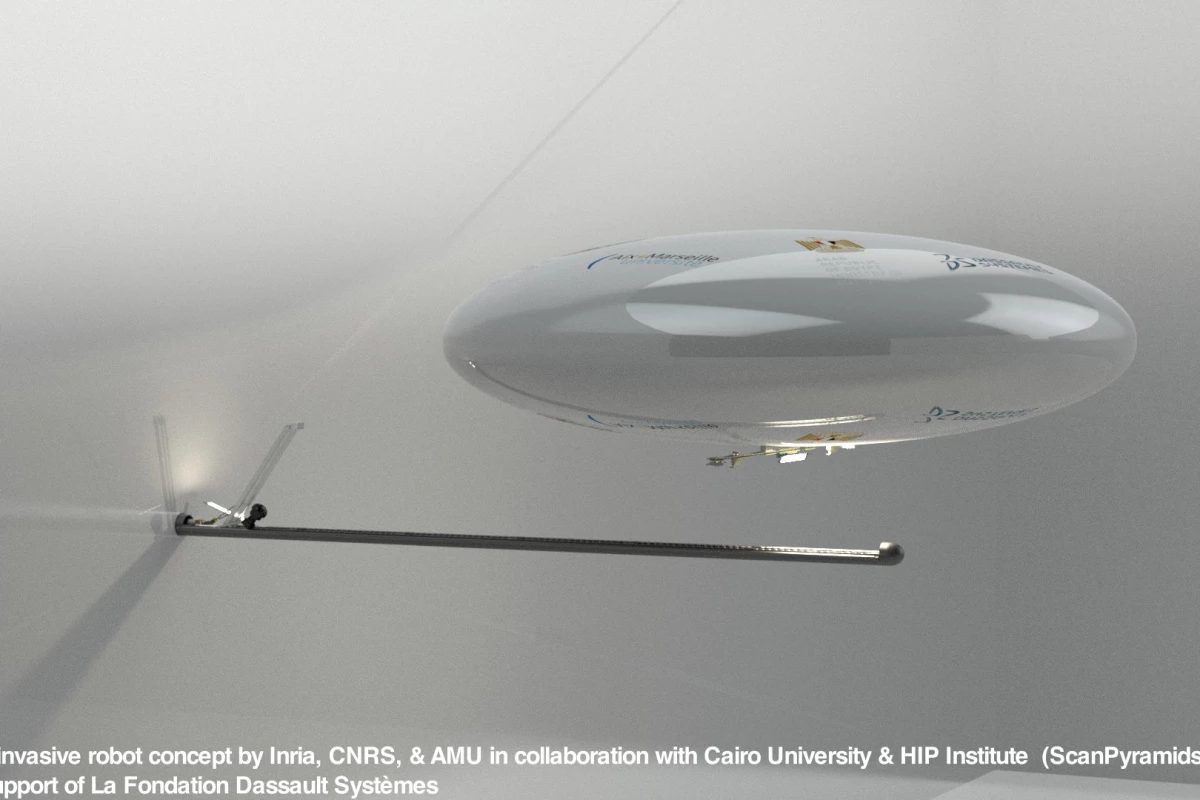
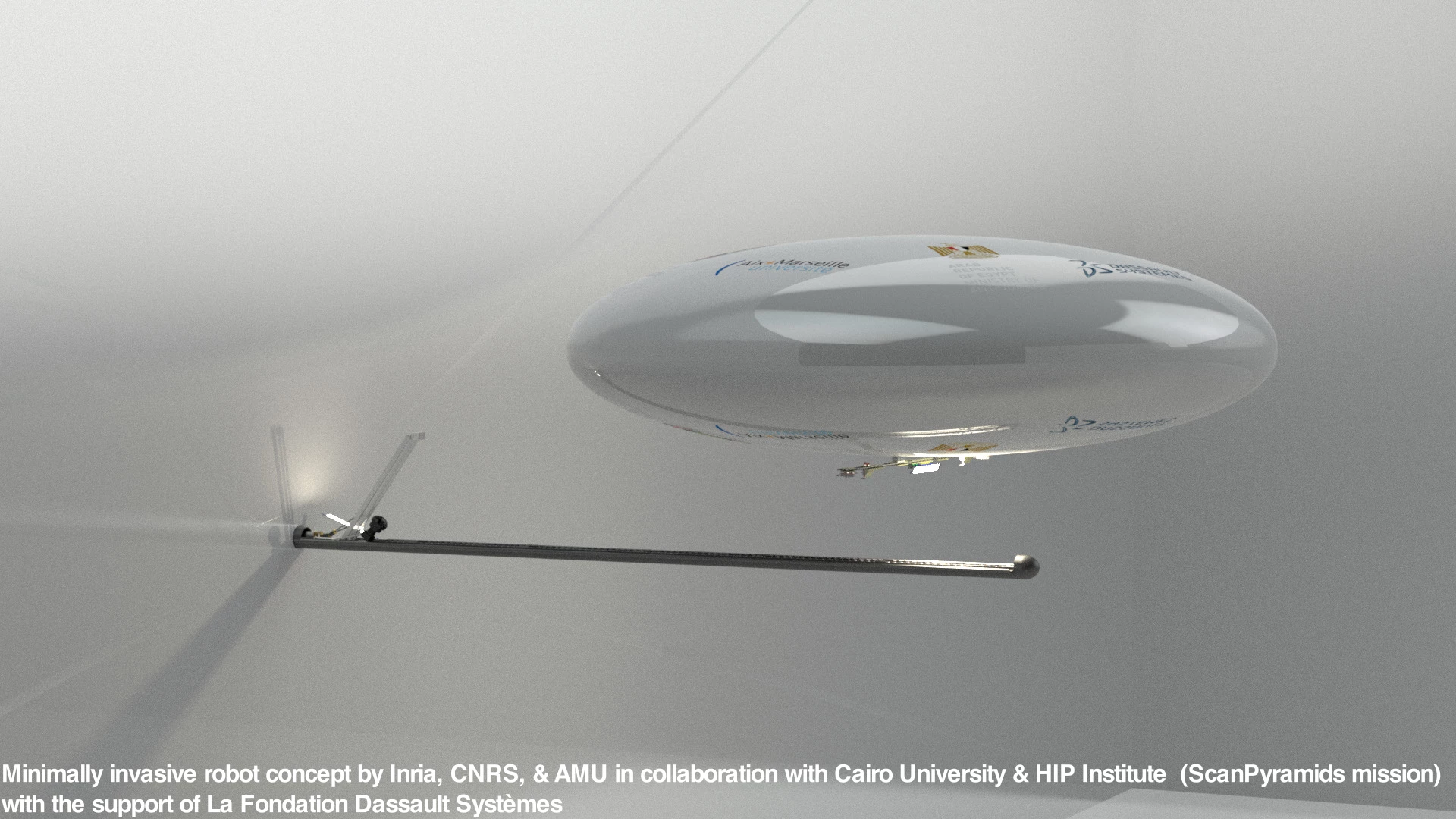
This one would be a self-inflating, sensor-packed blimp that could explore the hidden world, mapping the layout, collecting data and snapping photos or video without causing damage to the fragile building or monument.
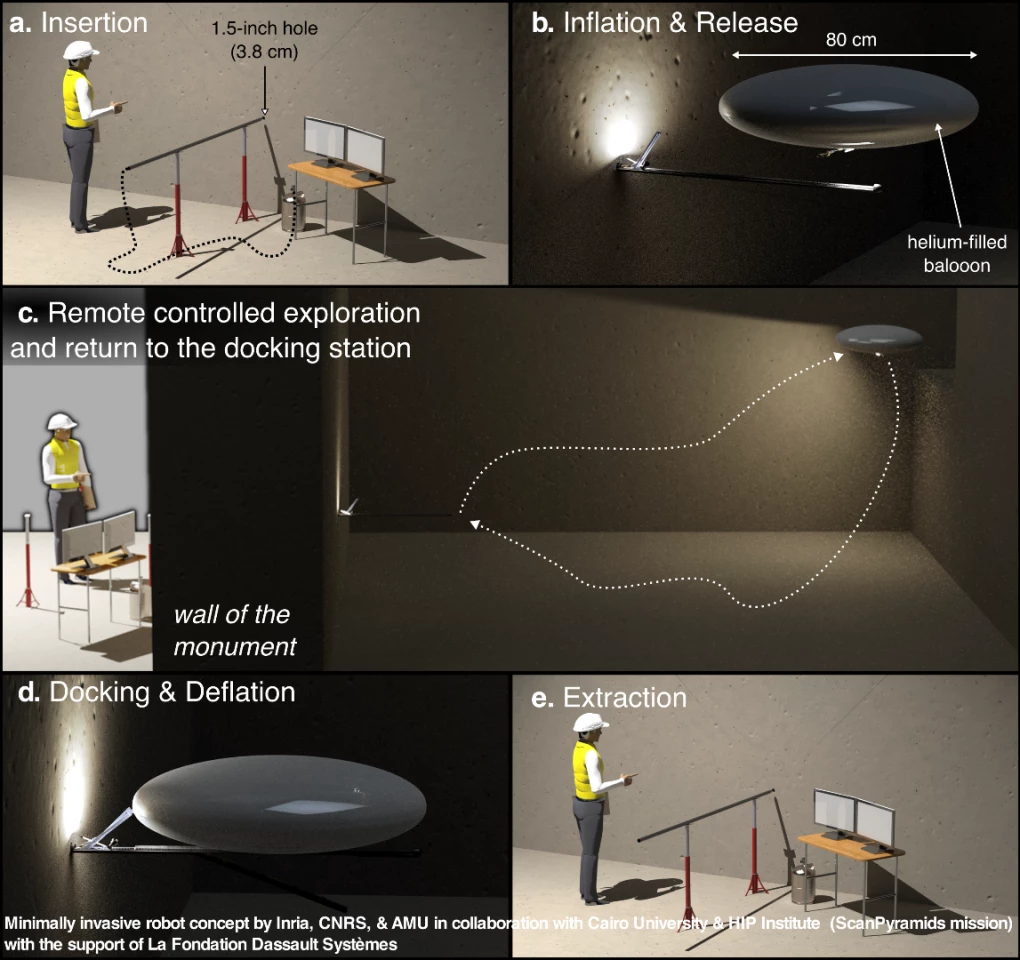
The development team says that where a ground-travel robot might need to overcome many obstacles – such as steps, rocks or fallen debris – a remotely controlled flying explorer wouldn't be hindered by such things, has the potential to move through spaces faster than wheeled robots and could offer different points of view.
At the end of its mission, the blimp would return to a docking station and deflate itself for retrieval through the same hole.
"There is currently no concrete plan to send this robot in any particular monument, Said project leader Jean-Baptiste Mourret. "But it is the right time to imagine, develop and validate the technologies that are needed to explore heritage buildings."
That the project has been initiated by ScanPyramids could see the first application being minimal impact pyramid exploration. Will it be used to help quell the debate raging about the void discovered in the Grand Gallery of the Great Pyramid of Giza? We'll have to wait and see. Meanwhile, the video below outlines the current project thinking.
Sources: Inria, CNRS, ScanPyramids


