


It's the 21st century and by now, robotic helpers should be commonplace – if 1950s and 60s sci-fi predictions are to be believed. True, autonomous robots have made their way to the factory floor and busy warehouse, and are even greeting customers at some hotels. But few are out in the wild. And it's the wild that's the source of inspiration for a new breed of bots that can build structures to overcome obstacles.
Researchers at the University at Buffalo note that autonomous bots can do fine where the ground is flat or layout unchangeable, but throw in some random obstacles or difficult terrain and there may be problems. So, like many roboticists before them, they looked to nature for answers.
"When a beaver builds a dam, it's not following a blueprint," said Nil Napp, assistant professor of computer science and engineering at the university's School of Engineering and Applied Sciences. "Instead, it's reacting to moving water. It's trying to stop the water from flowing. We're developing a system for autonomous robots to behave similarly. The robot continuously monitors and modifies its terrain to make it more mobile."
The project is developing algorithms to help robots better cope with the unpredictable nature of such things as disaster zones or, well, nature itself. The mathematical rules are being based on something called stigmergy, a kind of spontaneous collaboration where the next action is determined by the previous. Examples in nature include those damn-building beavers, termites building a nest, and even how Wikipedia operates.
It's thought that intricate termite mounds start with one pheromone-heavy mud ball. Other termites are attracted to the area and drop their own balls of mud in the same location. And so it goes on until impressive unique structures result. In a similar fashion, a Wiki user might create a simple new page, which is then modified by another, and another – each user refining the entry until it builds into a complex resource.
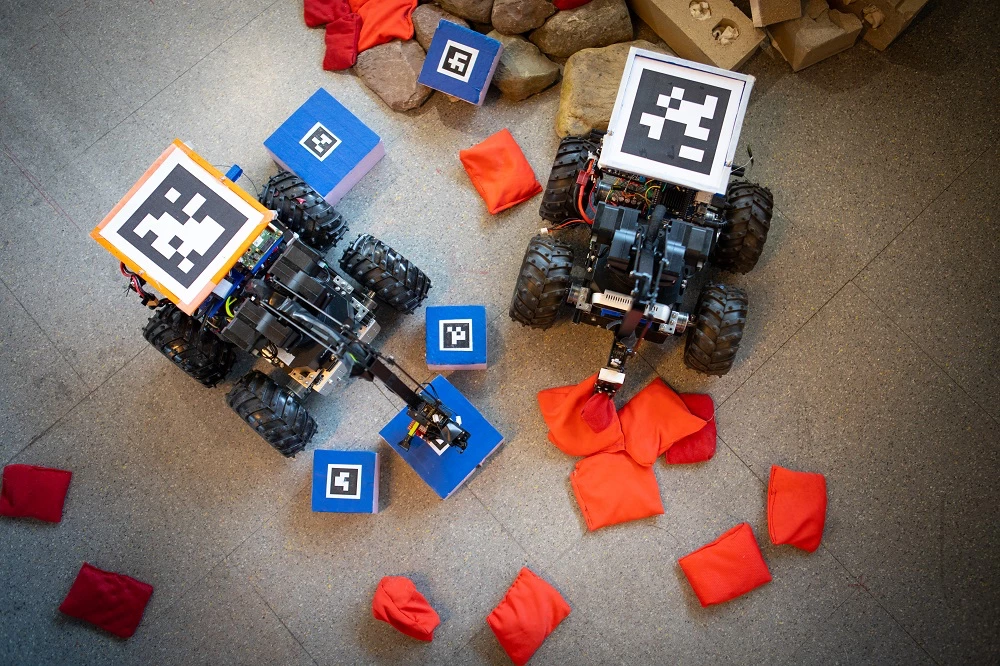
To test the principle, Napp and his students added a camera and robotic arm to a four-wheeled mini rover and loaded it with custom software that allows the robot to continually monitor its surroundings. Rocks, bricks and broken concrete were then scattered on the ground, along with piles of different-sized bean bags.
The rover picks up the bean bags and places them in gaps in the rubble, eventually making the area easier for it to move over and reach its goal (a flat platform on the other side).
"The robot takes its cues from its surroundings, and it will keep modifying its environment until it has created a ramp," explained Napp. "That means it can fix mistakes and react to disturbances; for example pesky researchers messing up half-built ramps, just like beavers that fix leaks in their dams."
It's thought that the development could be of use in robot search and rescue, disaster relief or planetary exploration. The project is detailed in a paper presented at the Robots: Science and System conference in Pennsylvania this week. A quick taster can be seen in the video below.
Source: University at Buffalo


