
Usain Bolt might have taken home the 100 meters gold medal from the recent London 2012 Olympics, but things could have been different had DARPA’s Cheetah robot been allowed in the field. Living up to DARPA's original goal of developing a robot that could outrun any human, the quadruped robot has set a new robotic land speed record of 28.3 mph (45.5 km/h) for a 20-meter (65.6 ft) split, bettering Bolt’s human speed record by 0.52 mph (0.8 km/h).
The Cheetah robot’s 28.3 mph run on a treadmill broke its own previous record of 18 mph (28.9 km/h) set earlier this year and outpaced the fastest man on Earth, who, according to the International Association of Athletics Federations, set the world record for a human in 2009 when he reached a peak speed of 27.78 mph (44.7 km/h) for a 20-meter split. Although DARPA points out, the fact Cheetah ran on a treadmill equates to a 28.3 mph (45.5 km/h) tail wind advantage.
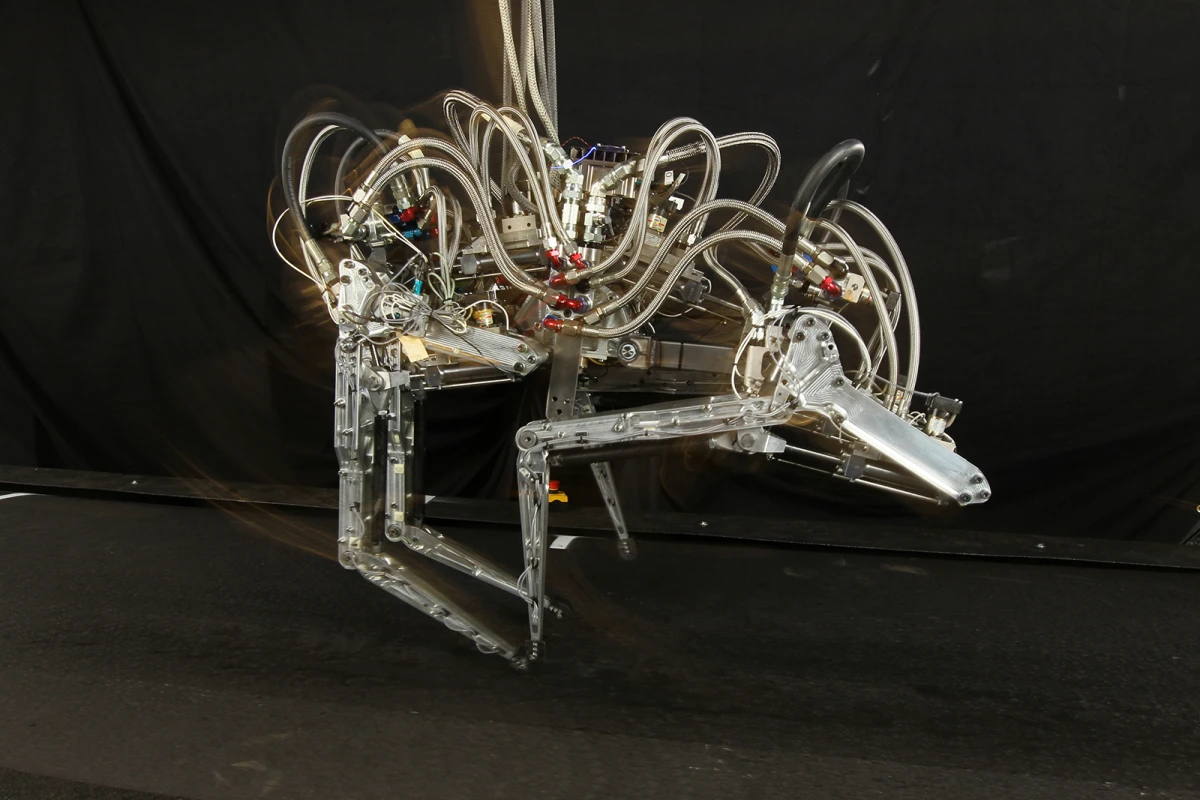
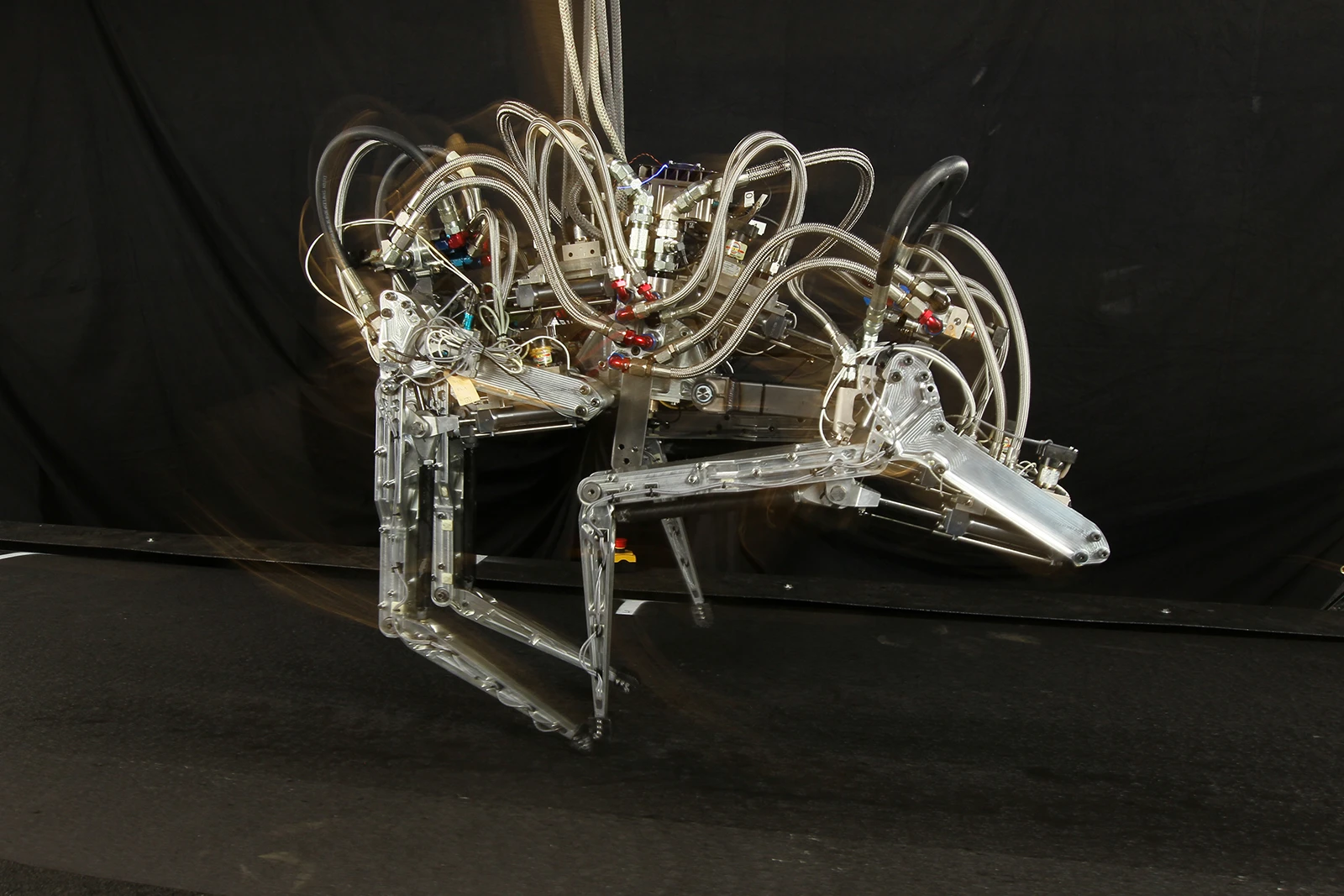
Being developed and tested by Boston Dynamics under DARPA’s Maximum Mobility and Manipulation (M3) program, Cheetah is being designed to perform in emergency response, humanitarian assistance and military missions. With such applications certain to involve rough terrain, DARPA intends to test a prototype on natural terrain next year.
In its current version, Cheetah is powered by an off-board hydraulic pump with a boom-like device keeping it centered on the treadmill. DARPA says improved control algorithms and a more powerful pump were responsible for the increase in speeds since the robot set its previous record.
Video of Cheetah’s record breaking run appears below.
Source: DARPA





