


The simple cucumber may be delicious on a salad or in a sandwich, but getting it to the table is a labor-intensive and increasingly expensive job, to the point where countries like Germany are in danger of seeing domestic cultivation move abroad. To keep German cucumber farms viable, the Fraunhofer Institute for Production Systems and Design Technology (IPK) is developing a simple, lightweight, and intelligent two-armed robot to automate harvesting of the vegetable.
If you've ever grown cucumbers in a garden frame, it all seems an easy enough way to get your salad fixings. They aren't that hard to cultivate and don't really need much aside from watering, weeding, thinning, and chasing off the odd insect or rabbit. But commercial farming of the common gherkin is another matter entirely. The fields are huge and harvesting the ripe veggies requires a small army of seasonal workers, who lie on their stomachs on "cucumber flyers" (pictured below), which are harvesting vehicles with long, winglike attachments that carry the pickers.

The work is tedious, repetitive, and exhausting. It's also increasingly expensive in countries like Germany, where rising wages are making it difficult for cucumber farmers to compete with international markets. To prevent cucumber production from relocating to areas like India and Eastern Europe, Fraunhofer is working in conjunction with German and Spanish researchers on the Cucumber Gathering – Green Field Experiments (CATCH) project to create a robot that can take over the job of harvesting cukes and similar agricultural tasks.
It's a goal that's simple to state, but a cucumber patch isn't like a factory floor where the environment is easy to control and things can be set up to exploit a robot's strengths while minimizing its weaknesses. Farms are notorious for being muddy places where workers are expected to be outside in all sorts of weather and muddy conditions. Worse, the light varies in ways that makes it difficult for robots to analyze what they see – and the fact that green cucumbers hide among green foliage doesn't help either.
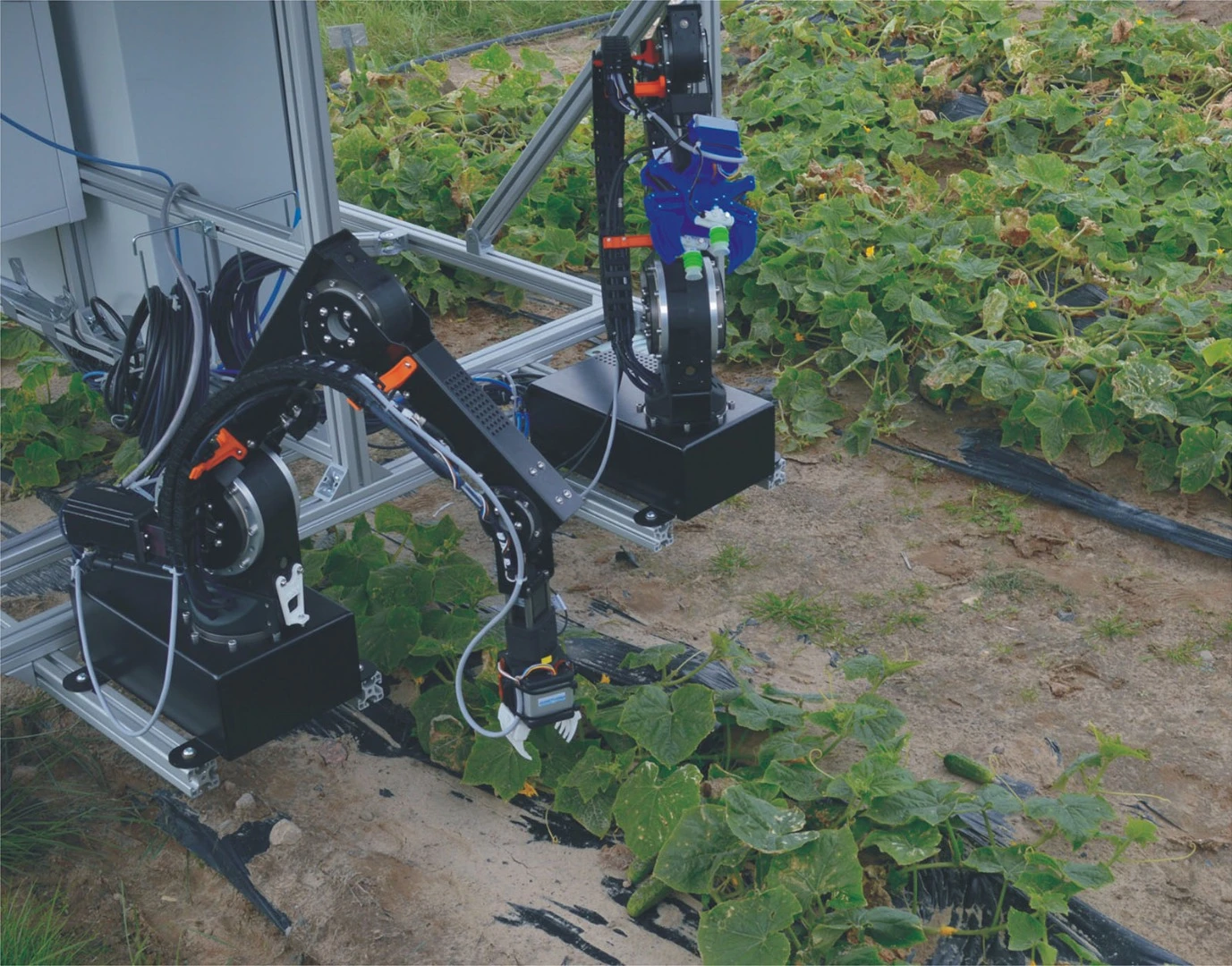
To overcome these problems, the CATCH team is developing a dual-arm robotic system made from inexpensive lightweight modules that is designed to be dependable and productive. Ideally, it should be able to identify ripe cucumbers and use its gripper arms that have five degrees of freedom to pick them and store them with a minimum of damage to the vegetable or the plant. It must do all this while matching or exceeding the human picking rate of 13 cucumbers per minute.
The CATCH project is developing three prototype grippers for the robot, with one using vacuum technology, a second with bionic jaws, and a third bespoke hand designed specifically for handling cucumbers. The dual-arm system will make use of software developed for the humanoid industrial Workbot I robot but modified to help it in cucumber harvesting, such has giving it the judgment to monitor picking operations and deal with exceptions.
"The robot can, for example, push leaves to the side using symmetrical or asymmetrical movements, or congruent and incongruent movements," says Dr. Dragoljub Surdilovic, a scientist at Fraunhofer IPK. "As a result, it can automatically change directions on the fly to approach and then grasp a cucumber."
The robot will use optical and tactile sensing that will include multispectral cameras linked to an intelligent image processing system to tell the cucumbers from the vines and leaves. According to Fraunhofer, Spanish CATCH partner CSIC-UPM has already developed a camera that can detect and locate cucumbers with a 95 percent success rate. The goal is to ultimately get the robot to tell ripe cucumbers from unripe ones.
According to Fraunhofer, the robotic system underwent preliminary field testing in July, 2017 at the Leibniz Institute for Agricultural Engineering and Bioeconomy, which involved the use of different kinds of cucumbers and included ones bred to be easier for machines to harvest. With the basic functionality now proven, the team hopes to produce a more advanced robot that could be commercially viable.
Source: Fraunhofer IPK






