







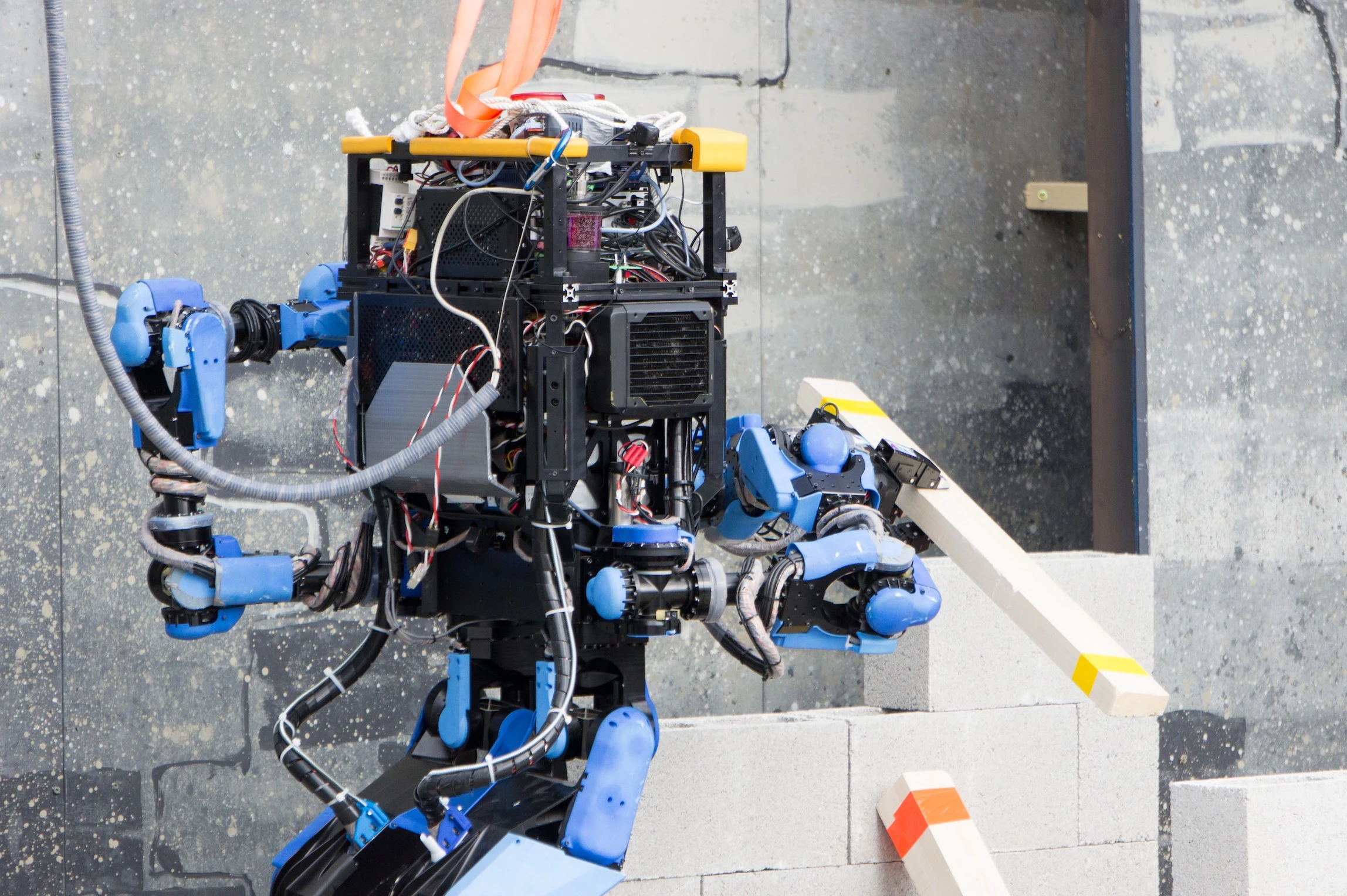


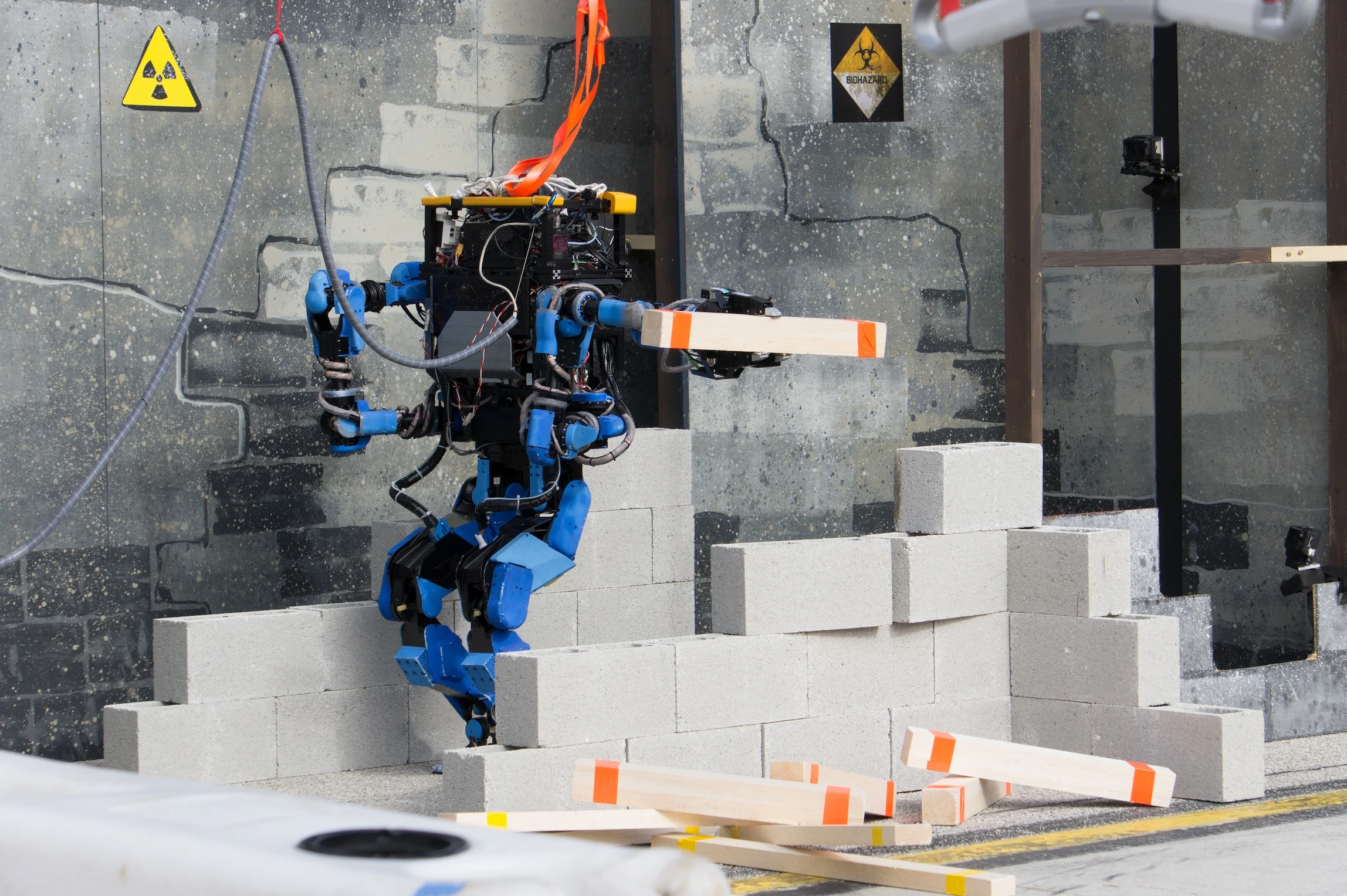








































































































































Leave it to DARPA to turn disaster relief into a competitive sport for robots, and for Google to walk away with the prize. On Saturday, 16 robotics teams from around the world competed in the DARPA Robotics Challenge Trials for 2013, as part of DARPA’s project for developing robots capable of autonomously navigating disaster areas and doing useful work using tools and materials at hand. The two-day event was streamed live on December 20 and 21 from Florida’s Homestead Miami Speedway. Google’s Schaft humanoid robot scored 27 points and won first place as it navigated an obstacle course which was made to simulate a disaster area, while carrying out a series of tasks.
Built by a Japanese start-up recently purchased by Google, Schaft isn’t what you would call photogenic. It stands 1.48 m (4.8 ft) tall, weighs in at 95 kg (209 lb) in its socks (if it wore socks), and looks like a partly disassembled air conditioner that’s grown arms and legs. However, what it lacks in aesthetics it makes up for in performance. According to Schaft, Inc, it’s based on the HRP-2 robot with hardware and software modifications, including more powerful actuator systems, a walking/stabilization system, and a capacitor that takes the place of a battery.
The competitors
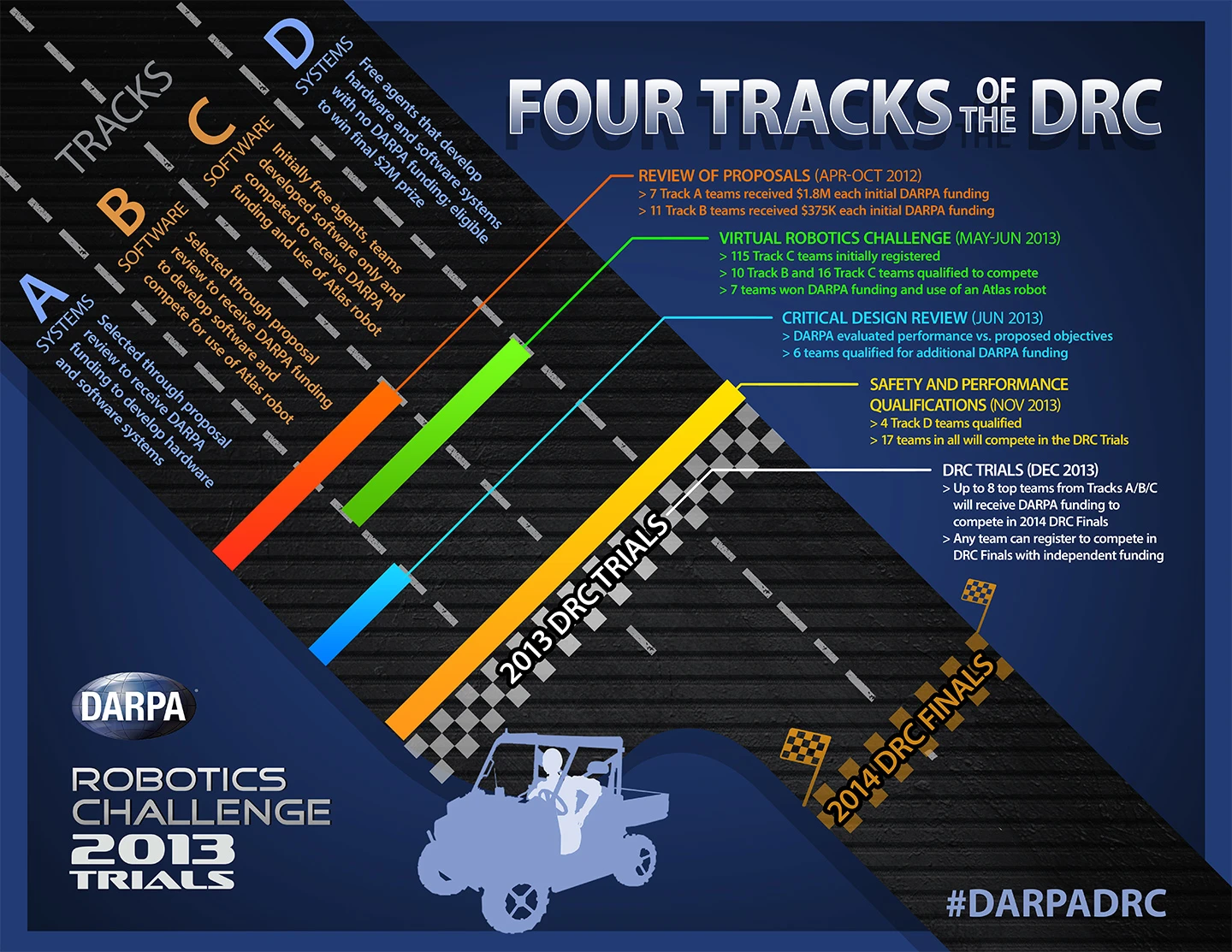
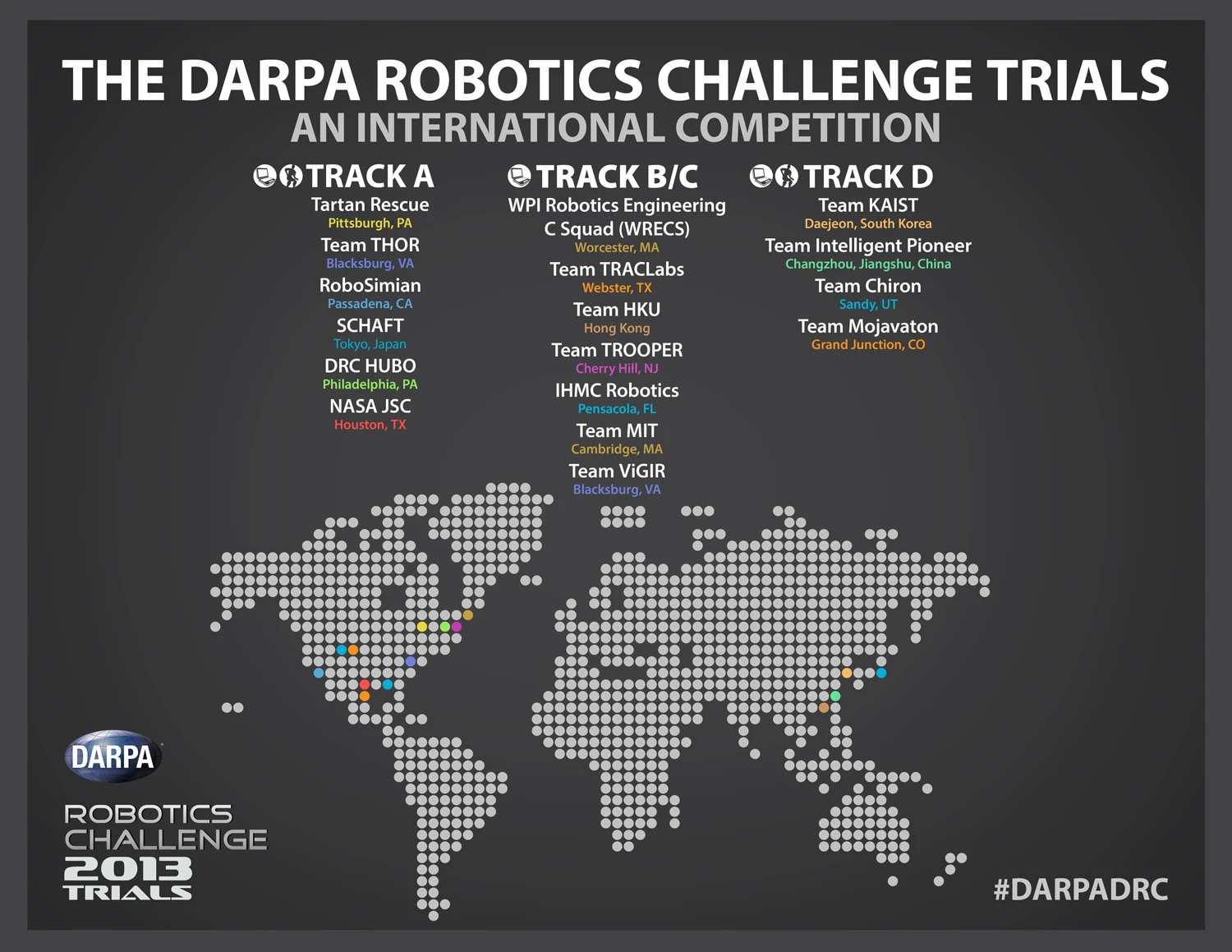
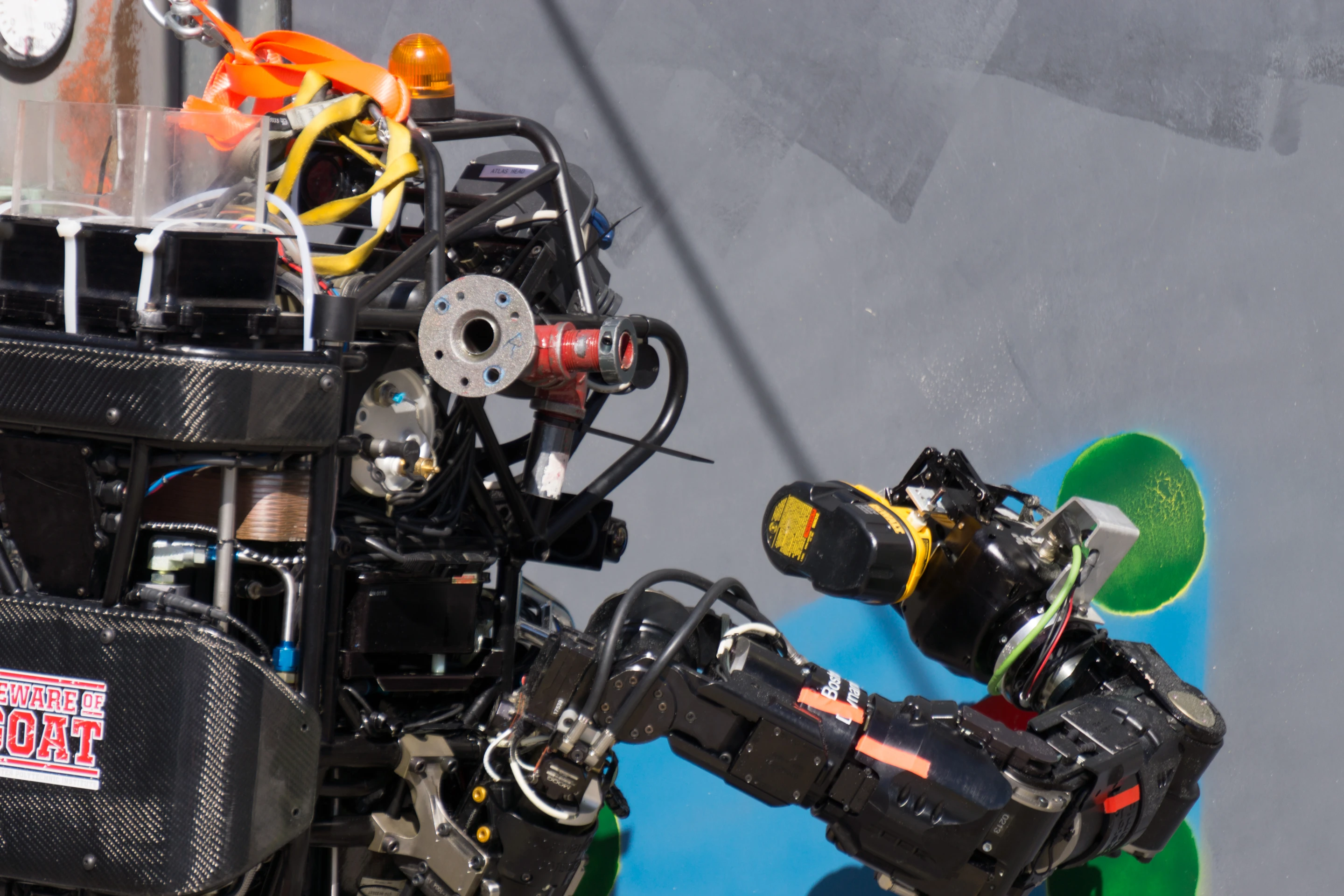
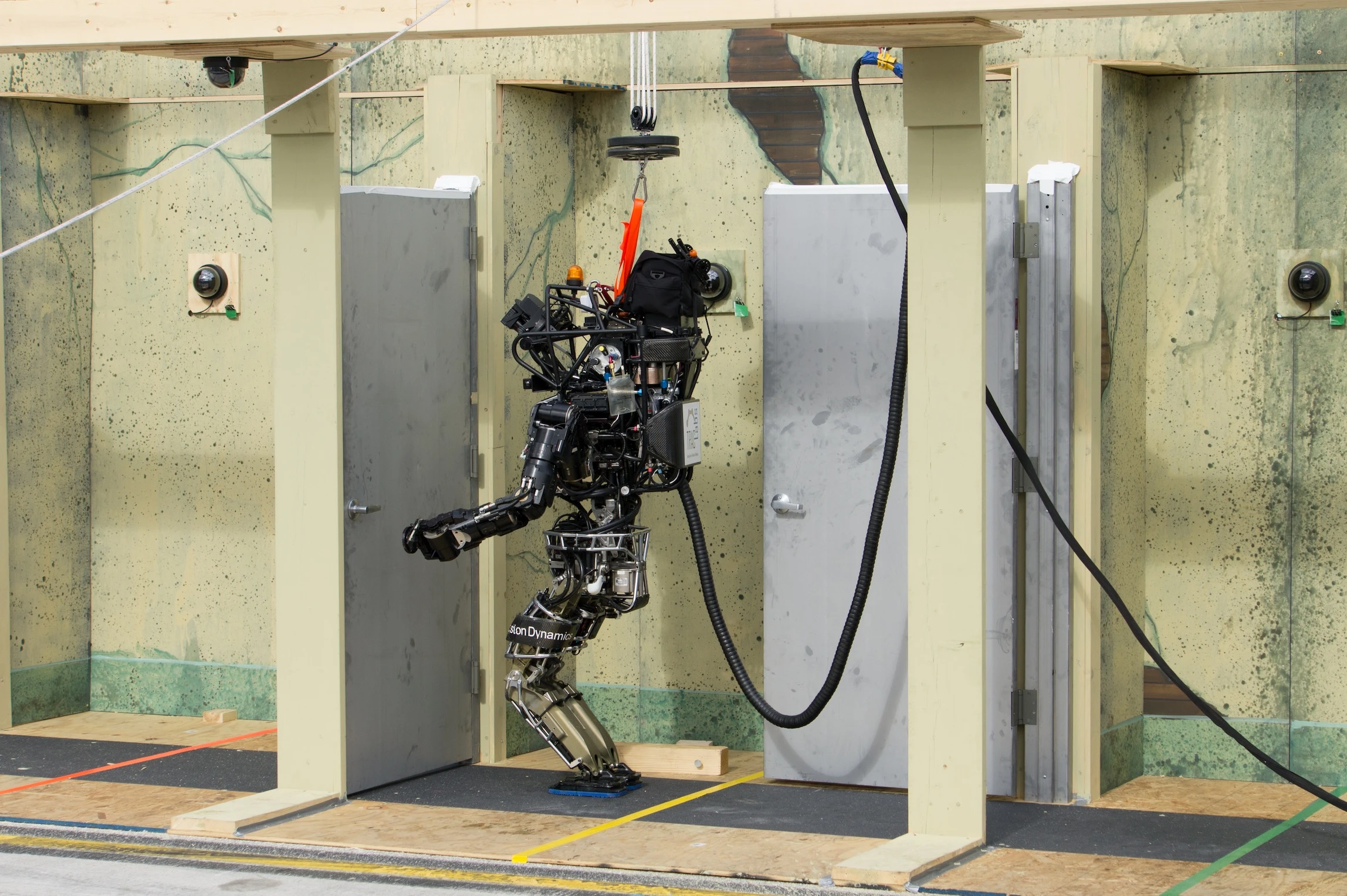
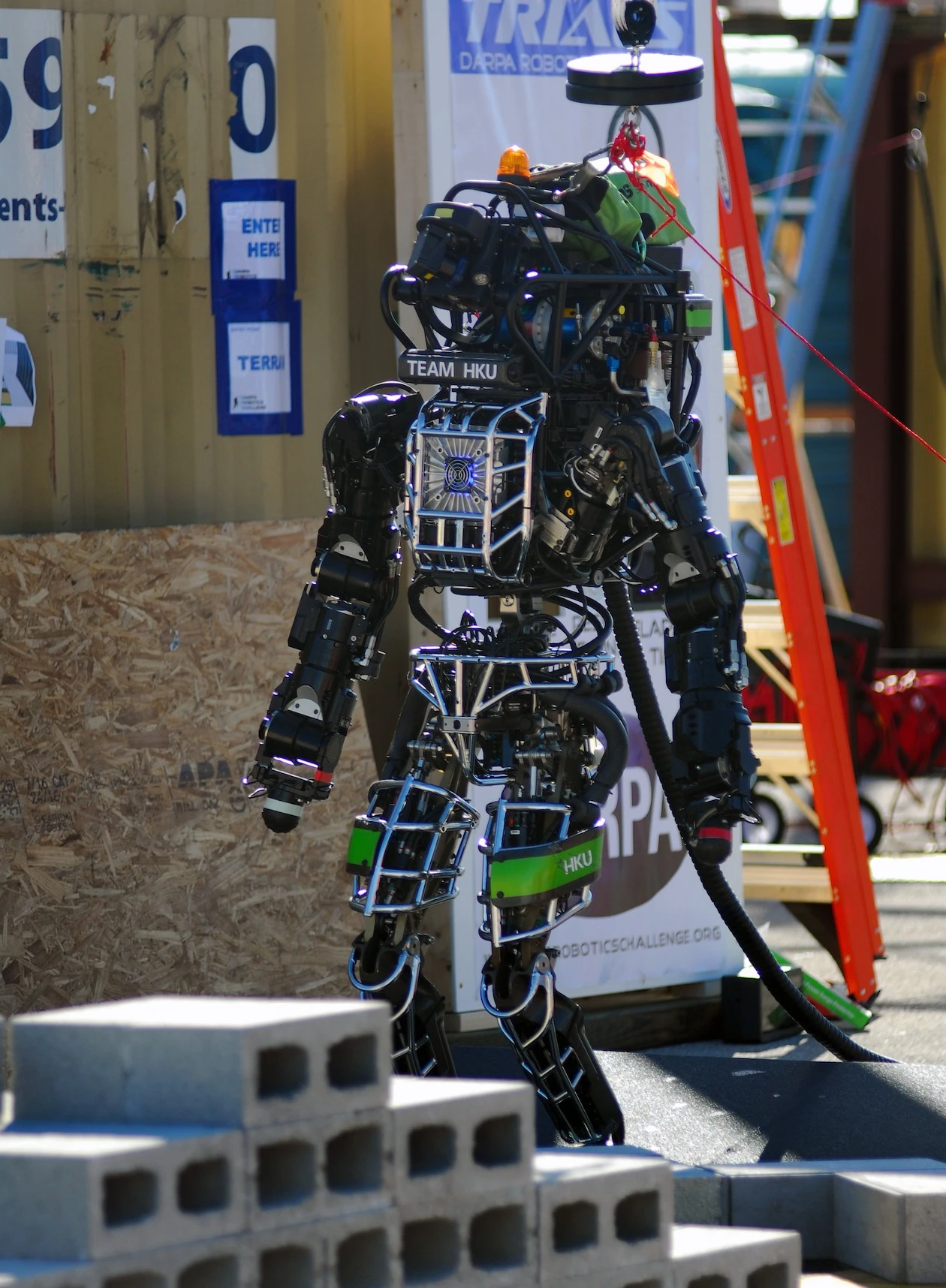
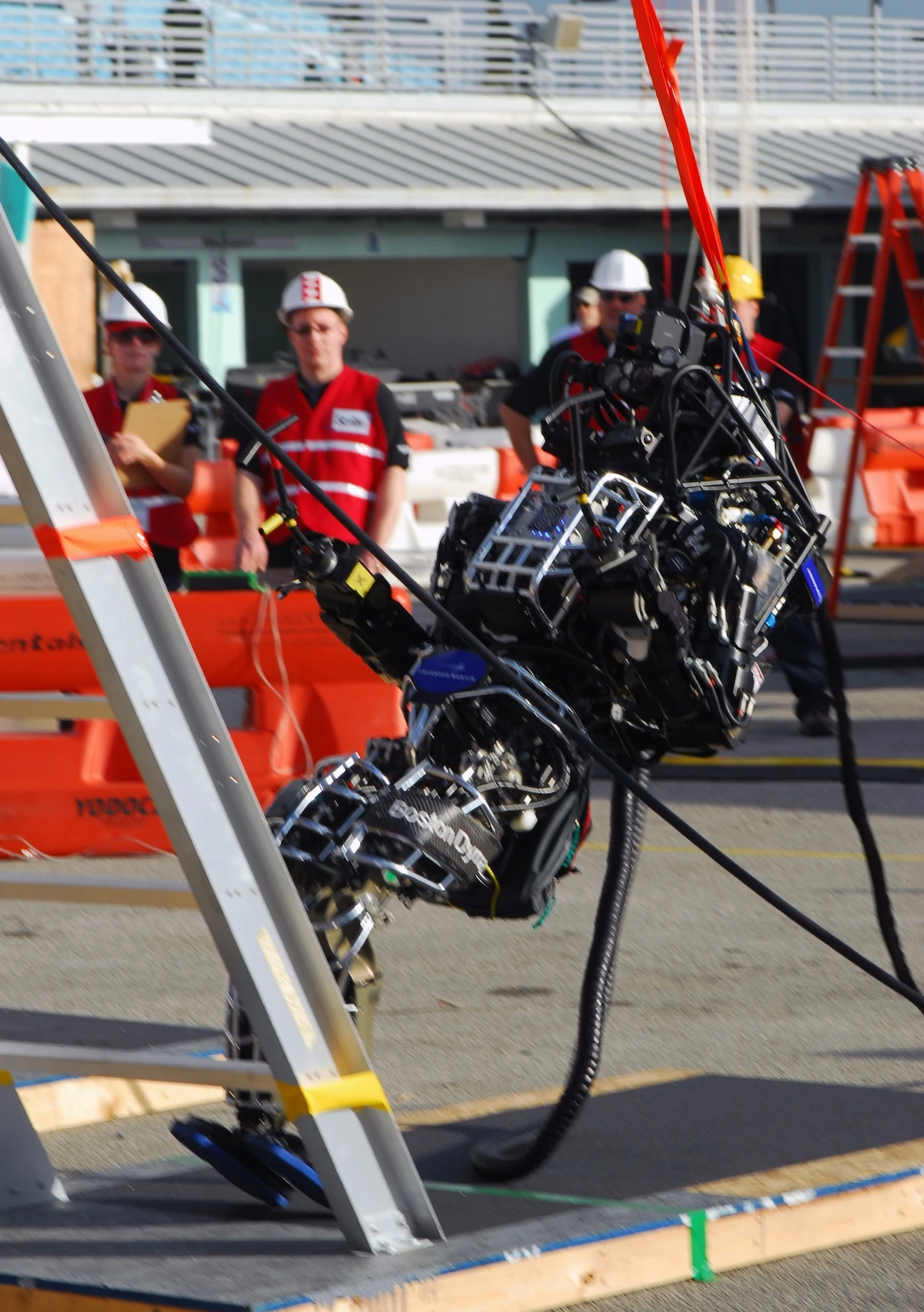
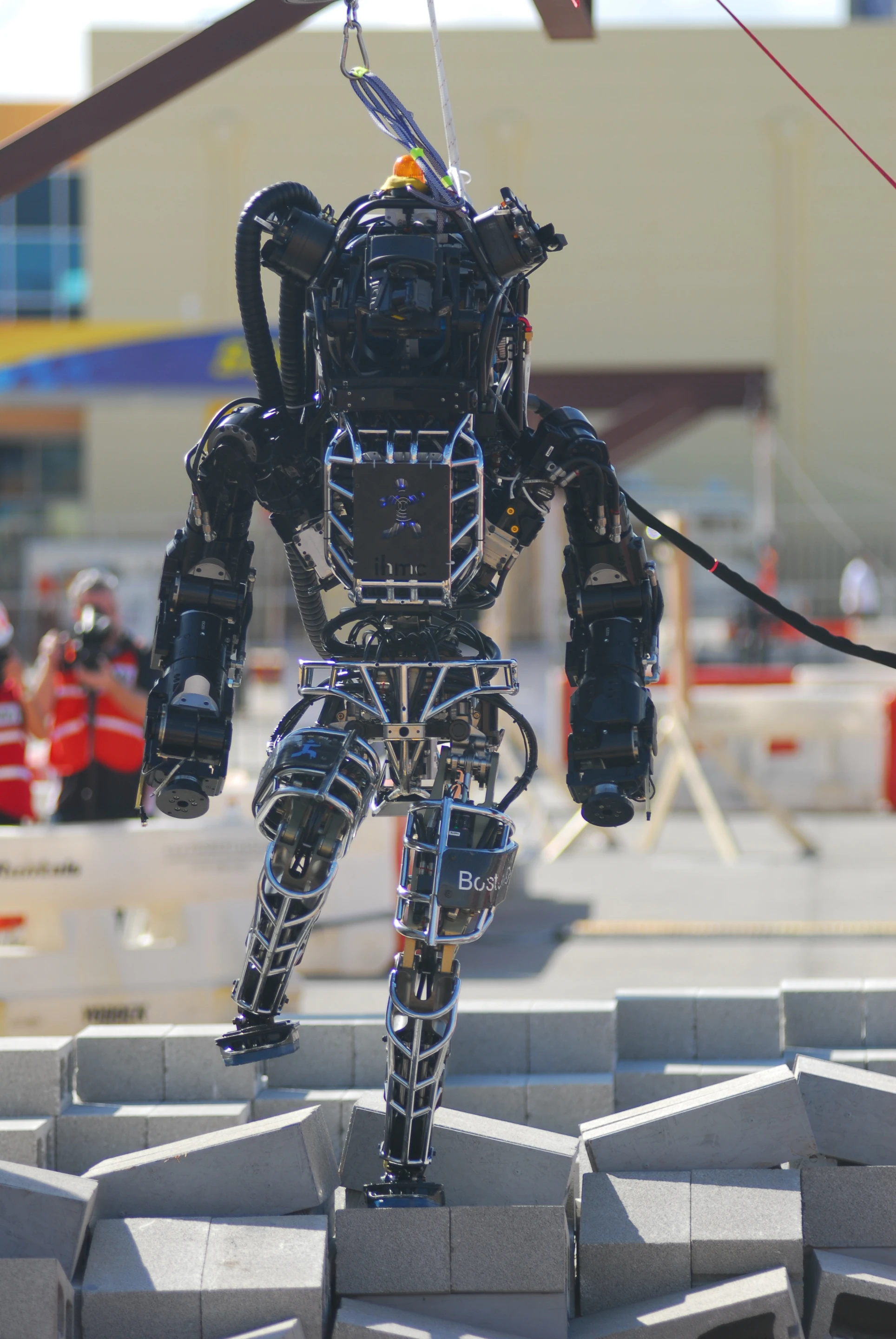
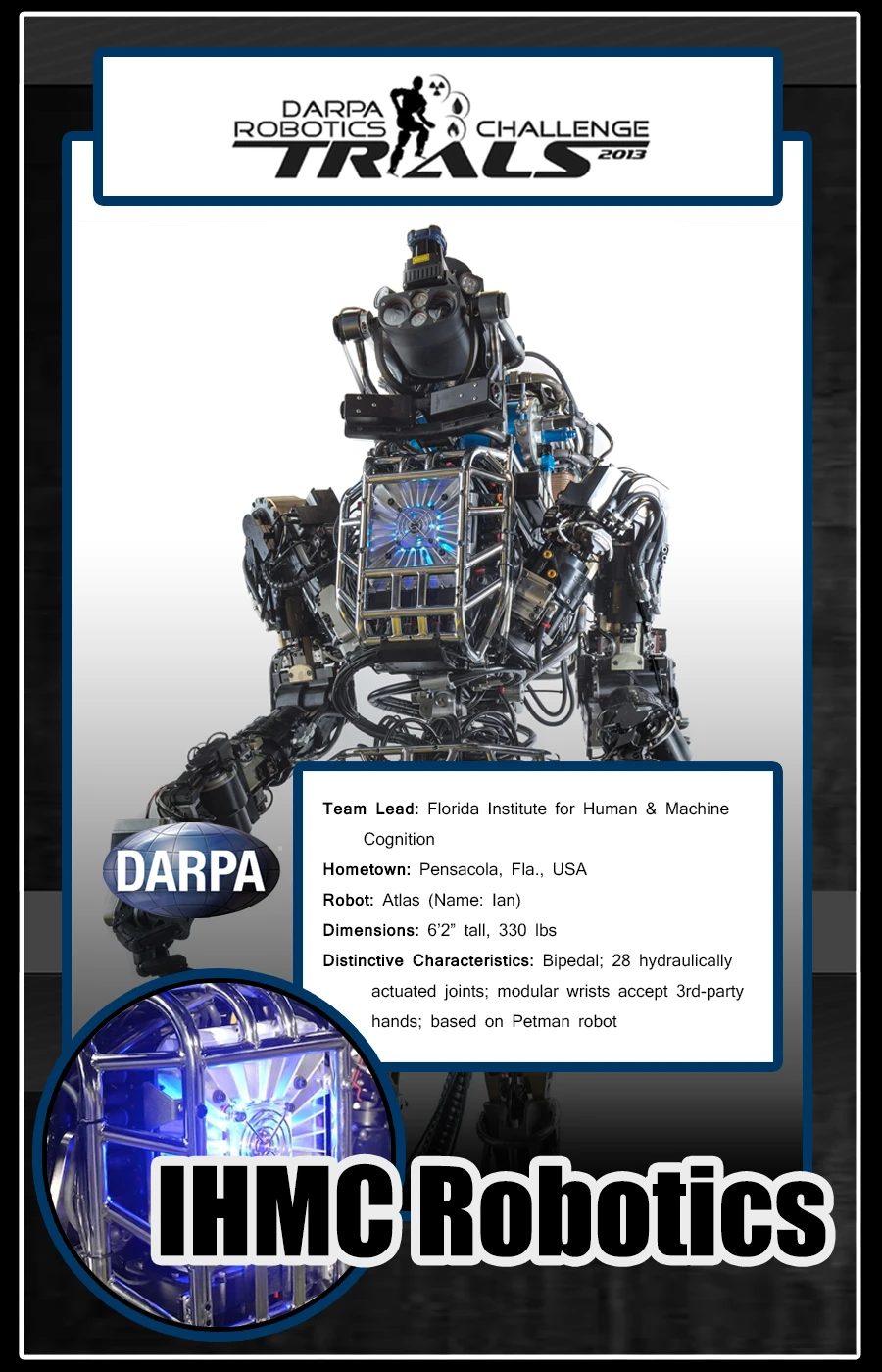
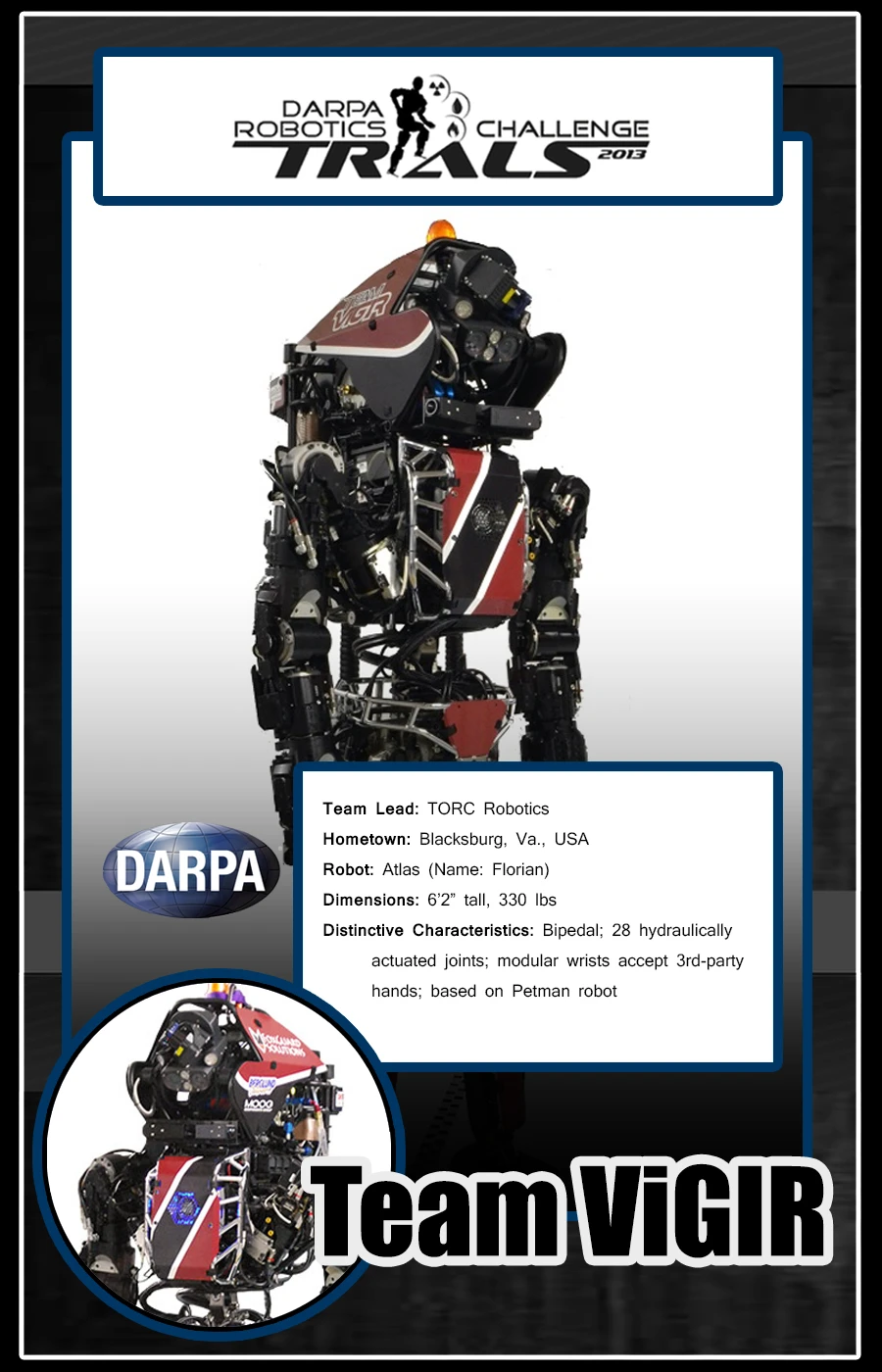
When the DARPA Robotics Challenge (DRC) was announced in April of last year, over 100 teams applied to compete. After a series of reviews and virtual challenges, the field was narrowed down to 16 competing in four “tracks.” Track A included teams that qualified for funding to develop hardware and software, Track B were funded to develop software and were supplied with a Boston Dynamics Atlas robot for the competition, track C were free agents who were later given software funding and an Atlas robot, and Track D were competitors who didn’t get any funding.

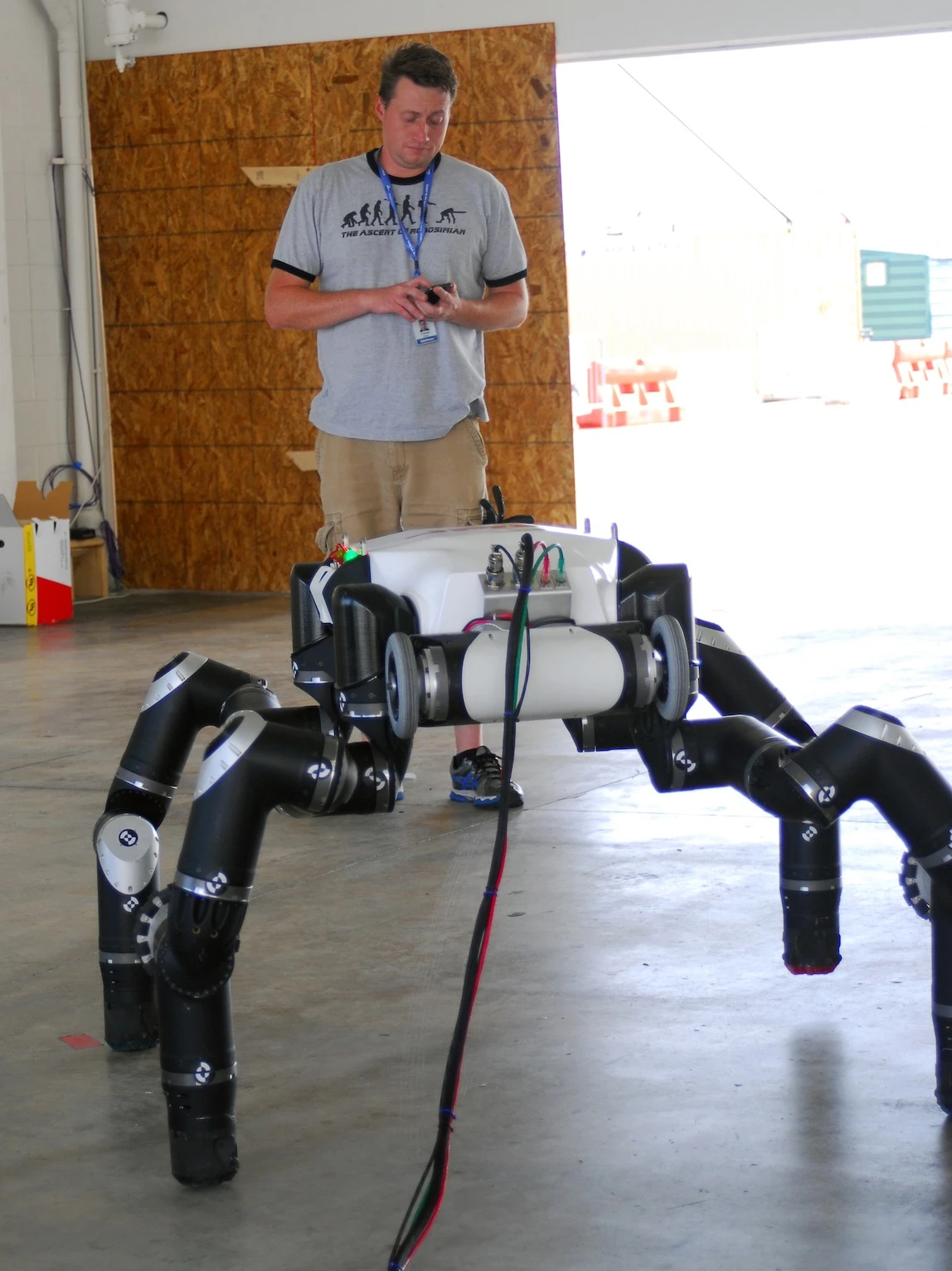
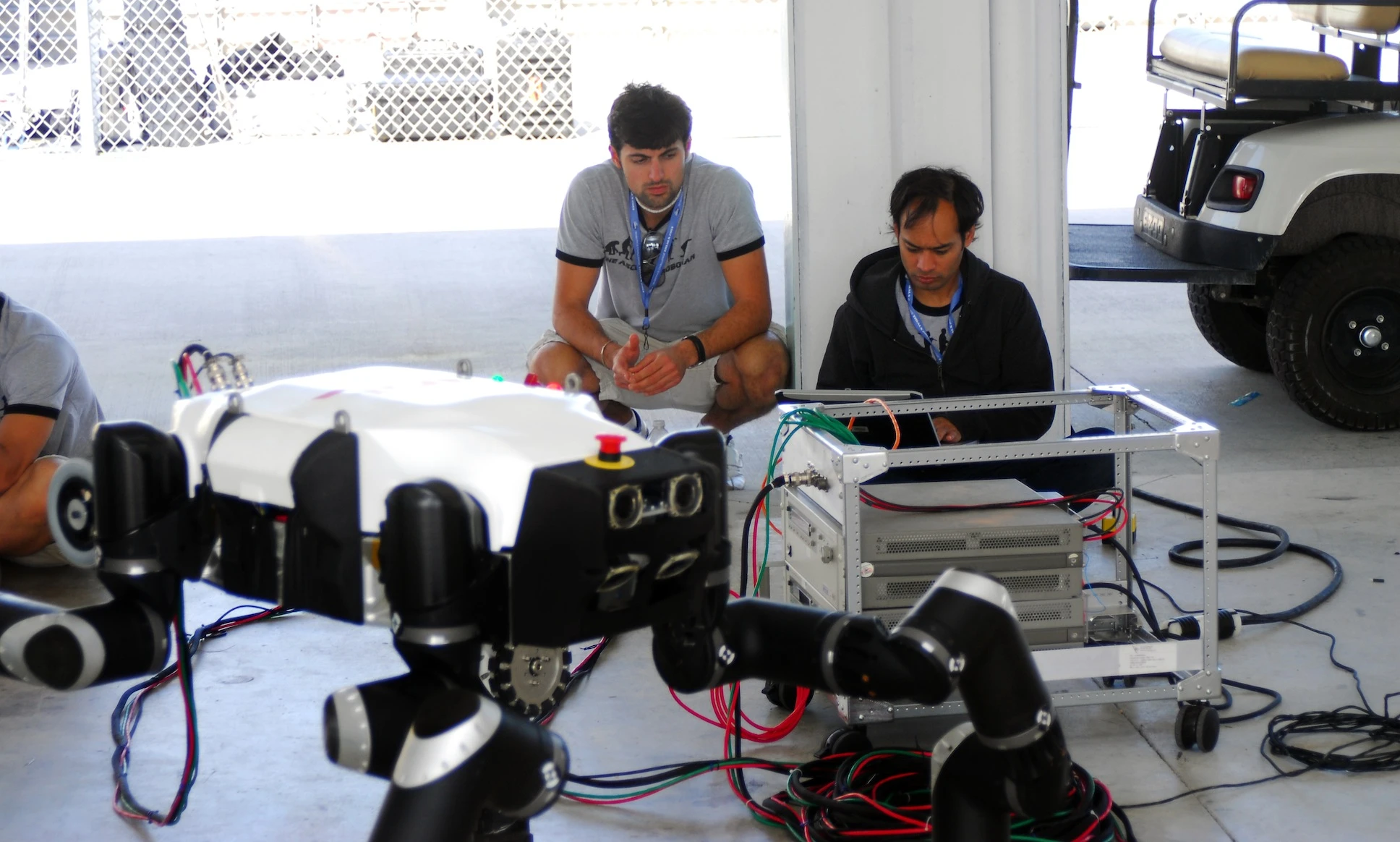
It wasn’t hard to figure out which teams belonged to which tracks. Track A, which Schaft belonged to, is notable for a pretty diverse collection of robots. For example, there’s RoboSimian built by NASA’s Jet Propulsion Laboratory (JPL). As the name implies, this prototype space explorer is supposed to be a sort of robot ape, though it looks more like the result of the mating of a robot crab and a robot octopus.
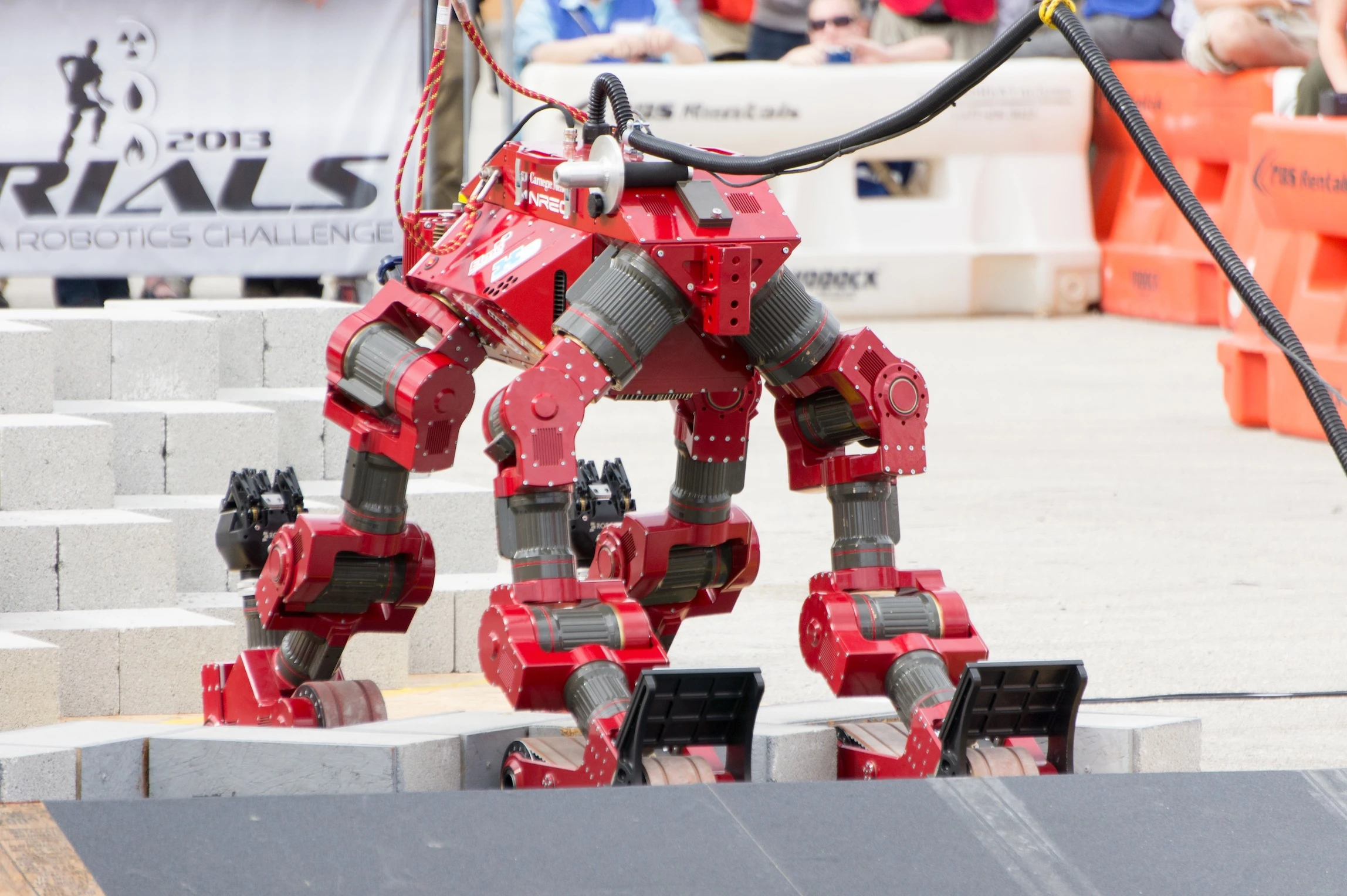
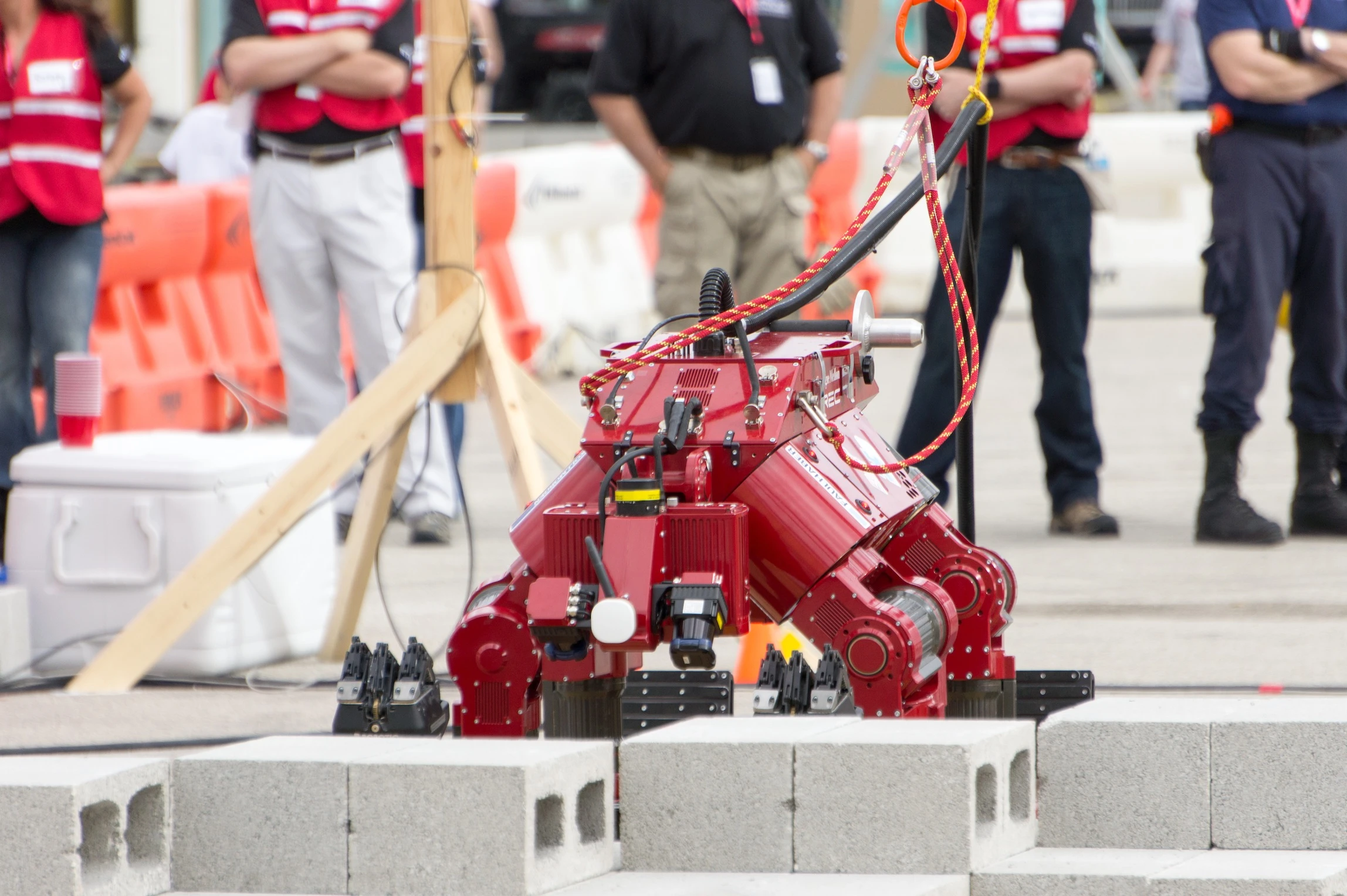
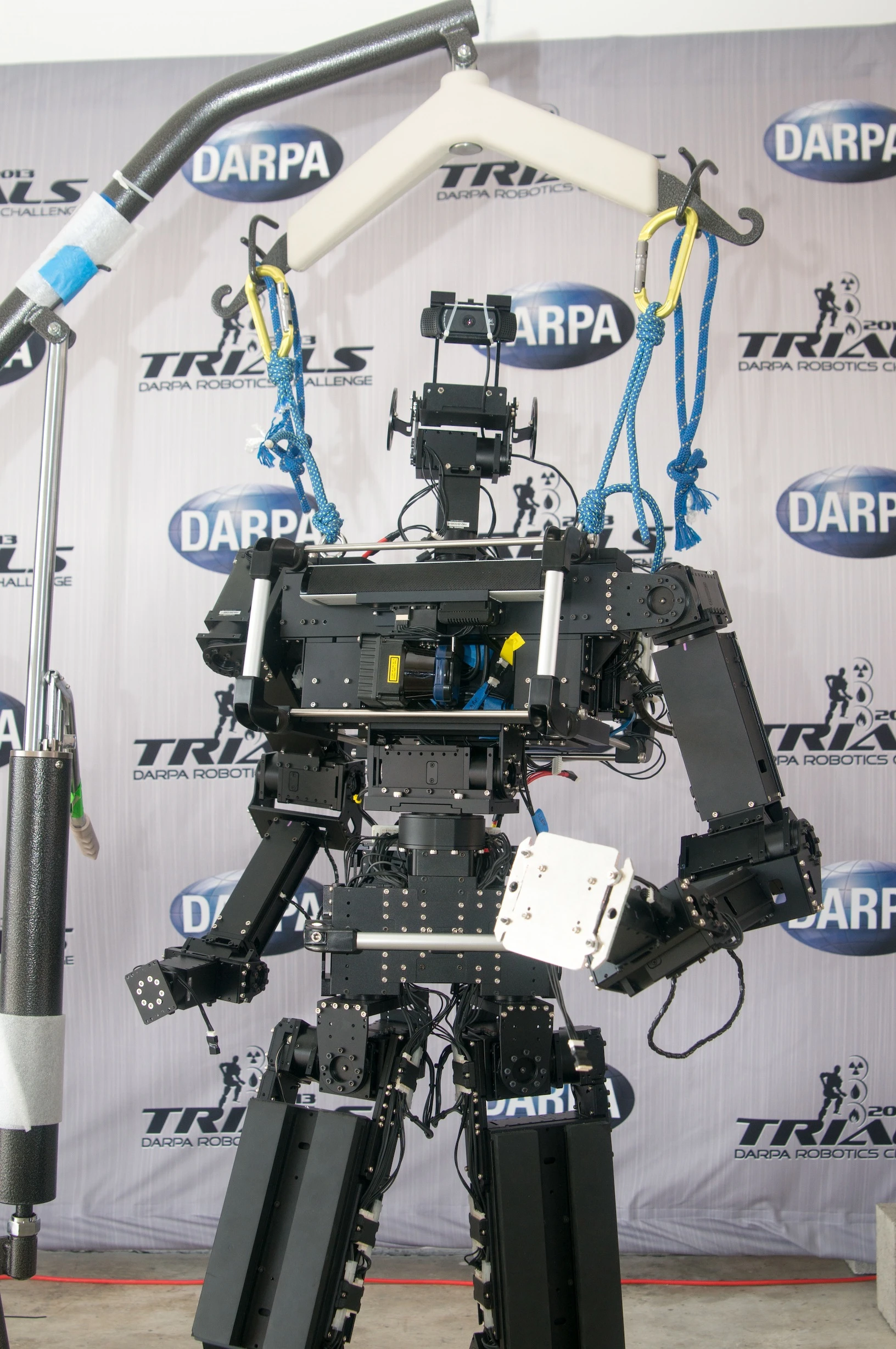
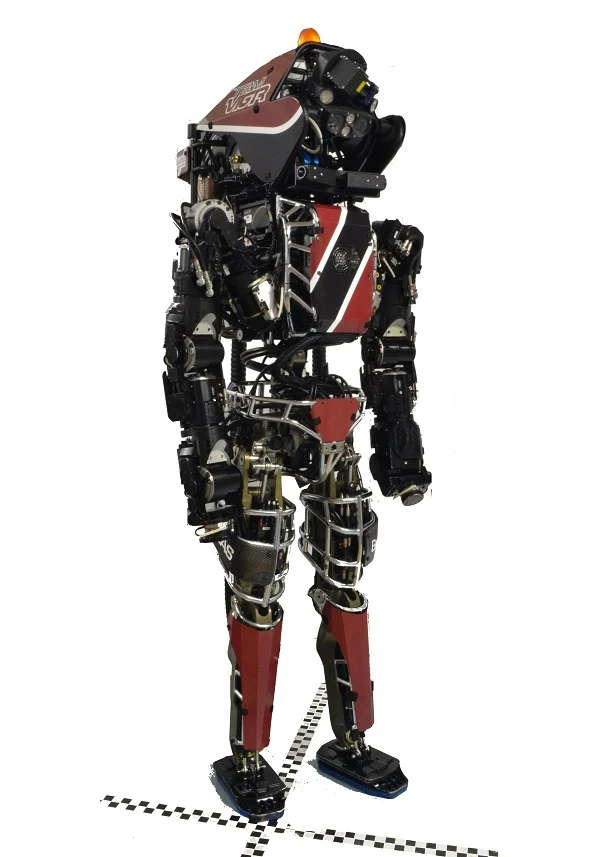
Another primatoid robot is Tartan Rescue’s CHIMP and it does resemble a chimp – assuming that chimps are bright red, lack heads, and have have rollers on their elbows for negotiating rough terrain. At the other end of the spectrum is the Johnson Space Center’s Valkyrie, which looks like an anime character complete with a Tony Starkesque chest light and what appear to be breasts, though the builders claim that it’s just a bulge to make room in the torso for linear actuators to move the waist.

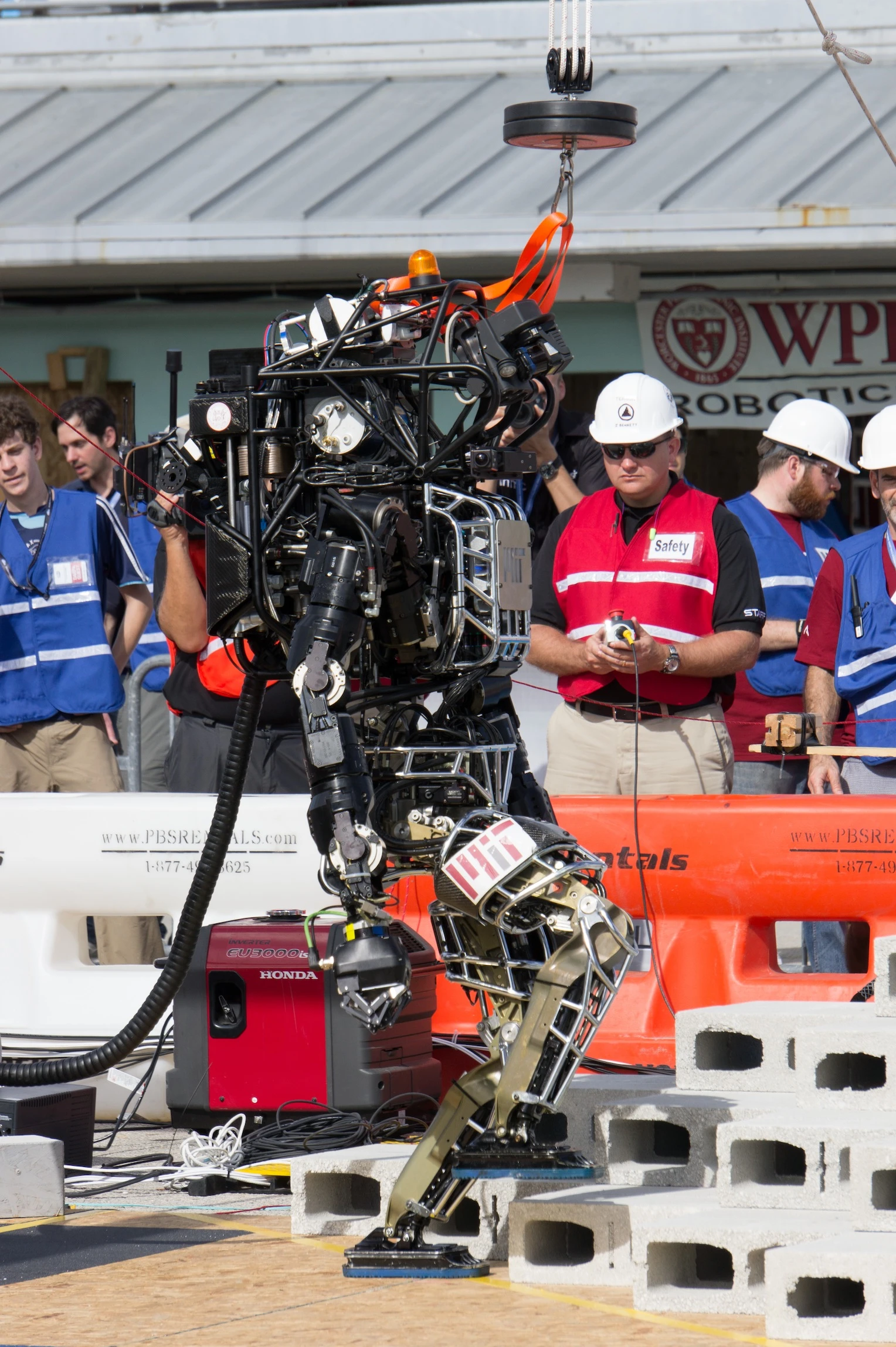
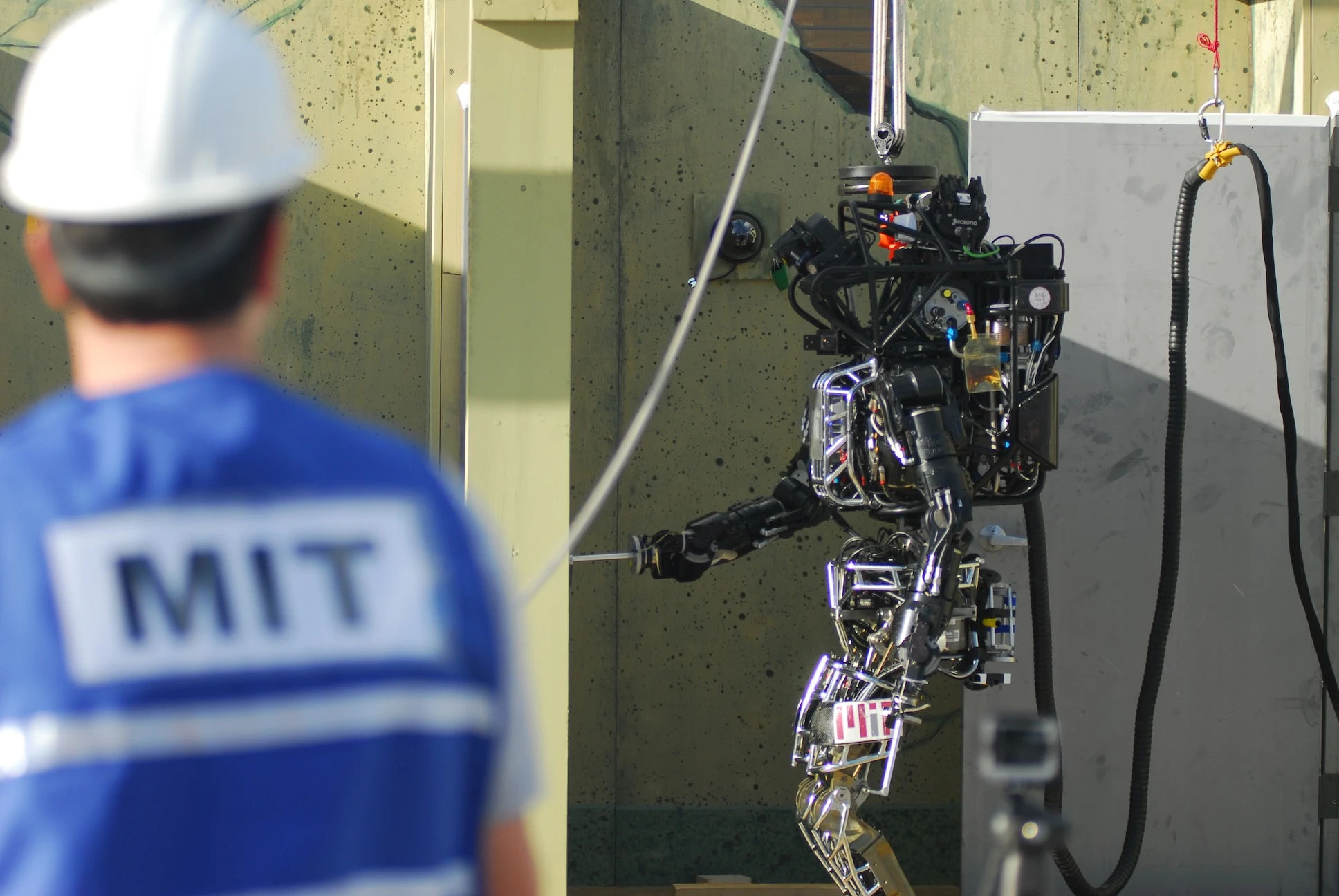
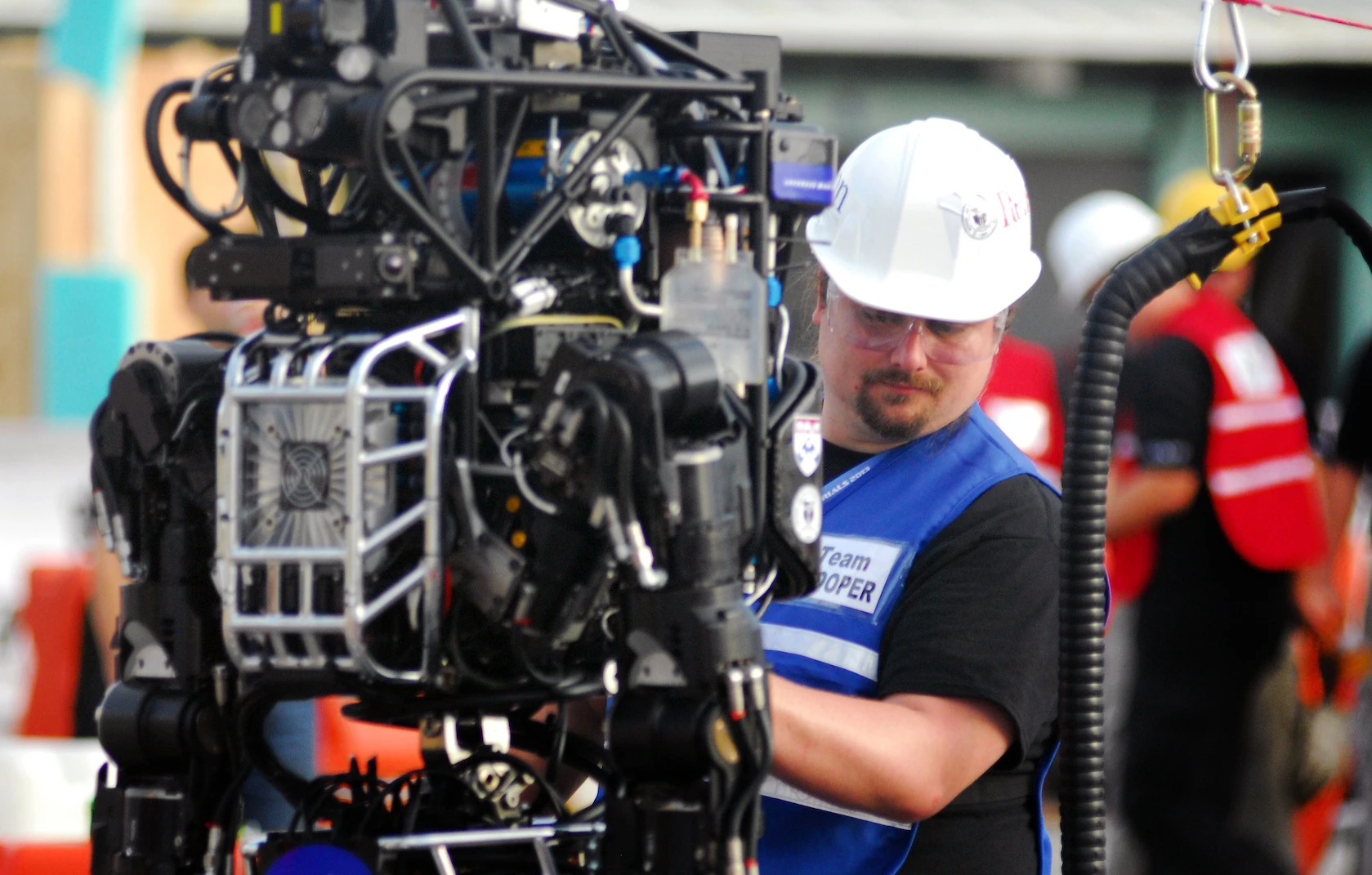
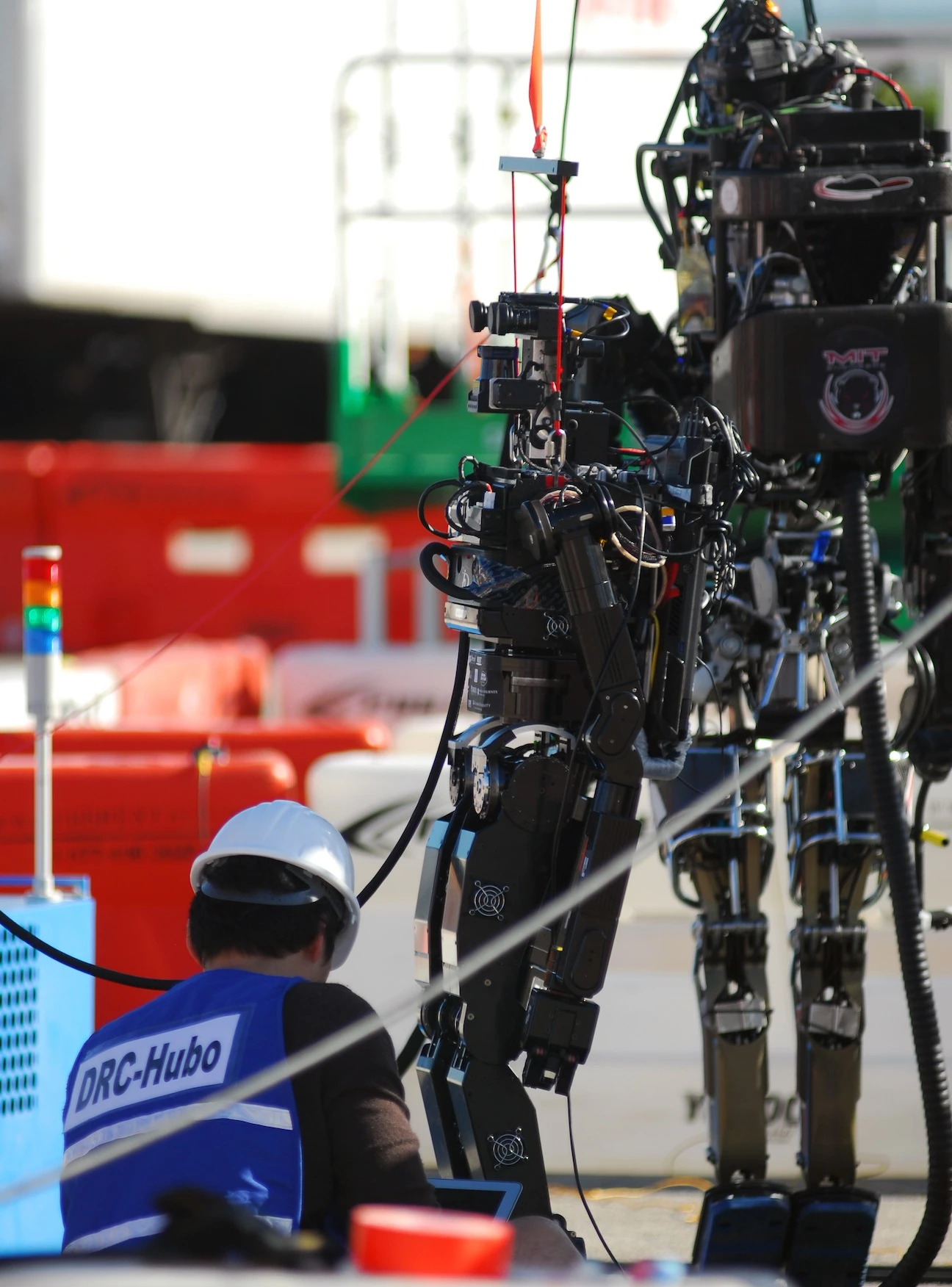
The B and C track teams are often difficult to tell apart because they all use Atlas robots. If it wasn’t for the cooling fan in the torso, it would have been nice if some money had been set aside for robotic T-shirts to keep them straight.
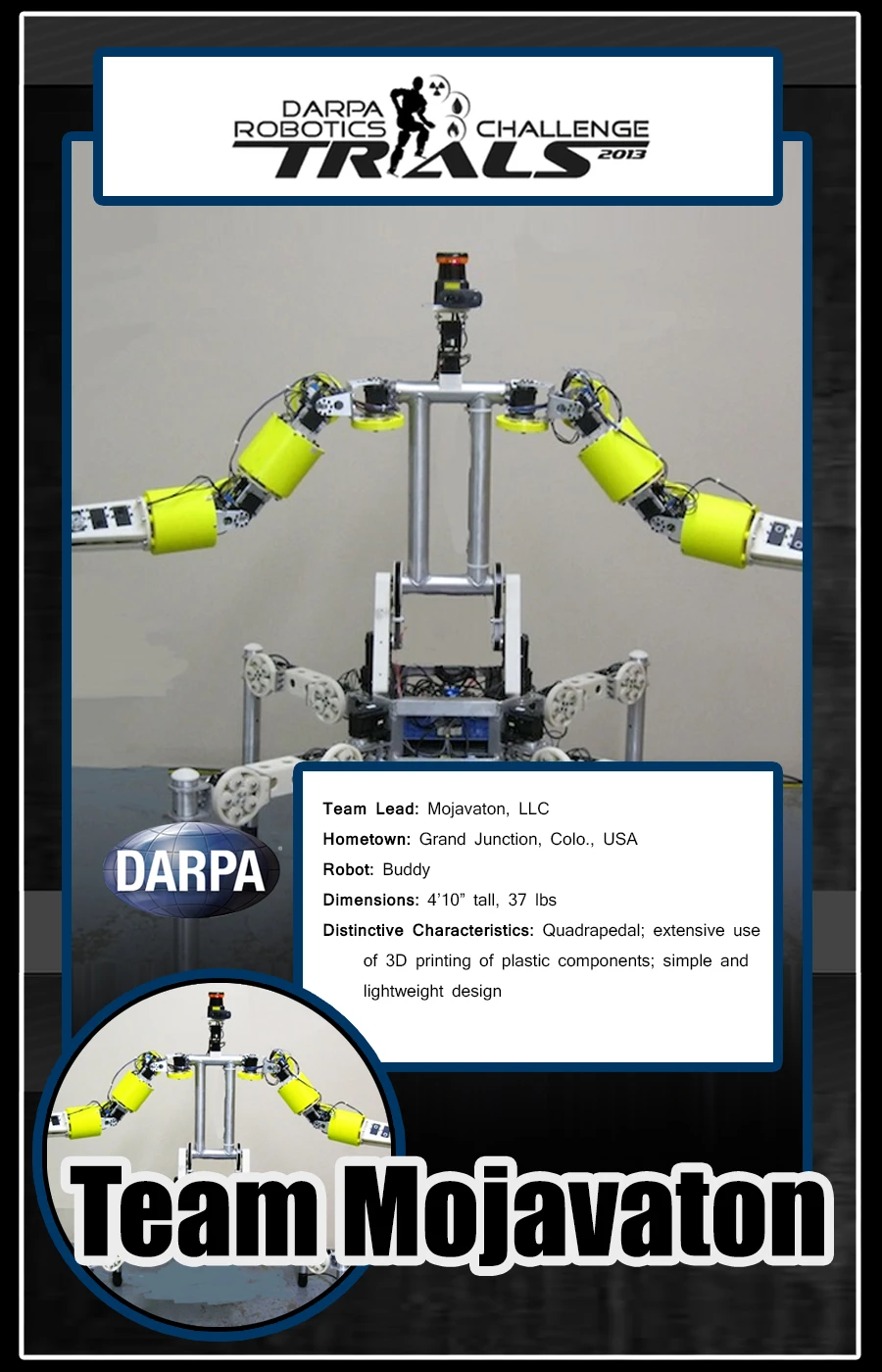
Finally, there are the D track teams, Chiron, which looks like a metallic sea louse; Mojovation, which is distinctly minimalist; South Korea’s Kaist, and China’s Intelligent Pioneer.
The competition
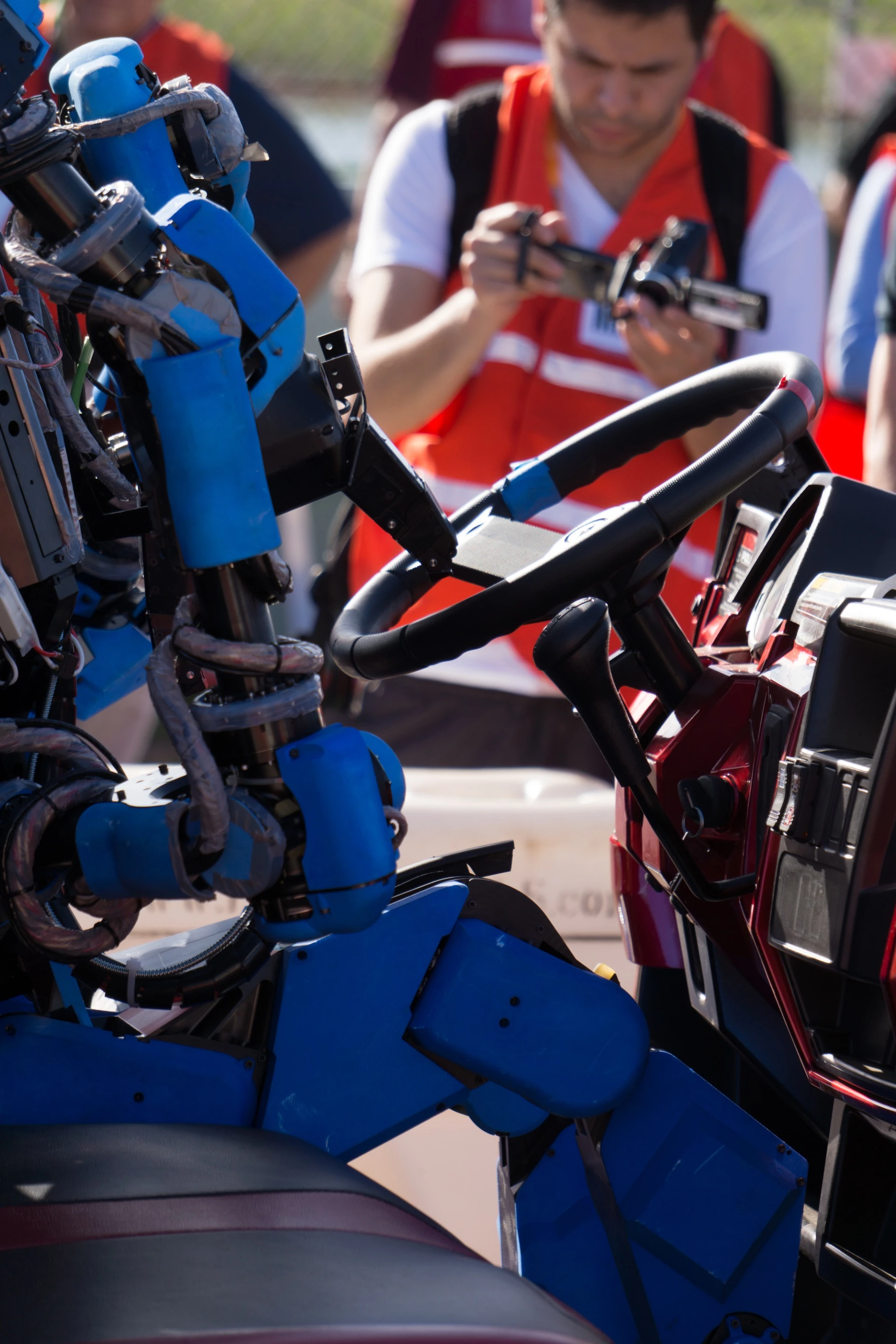
These 16 teams from around the world were set eight individual, physical tasks that test mobility, manipulation, dexterity, perception, and operator control mechanism. Each set of challenges was worth three points.

The first part of any relief operation is getting to the disaster area, so the robots had to drive a Polaris Ranger XP 900, complete with airless tires, through an obstacle course of barriers and barrels, then they had to get out of the vehicle and walk to the finish line.
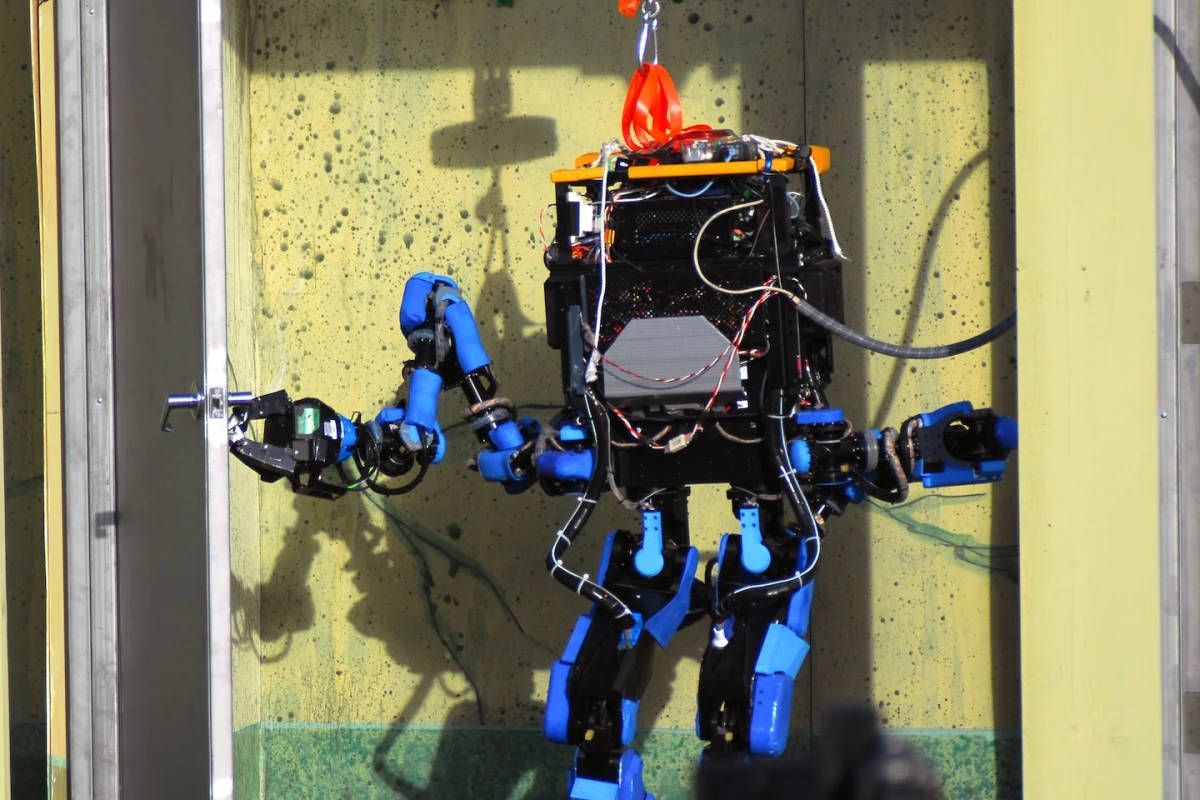
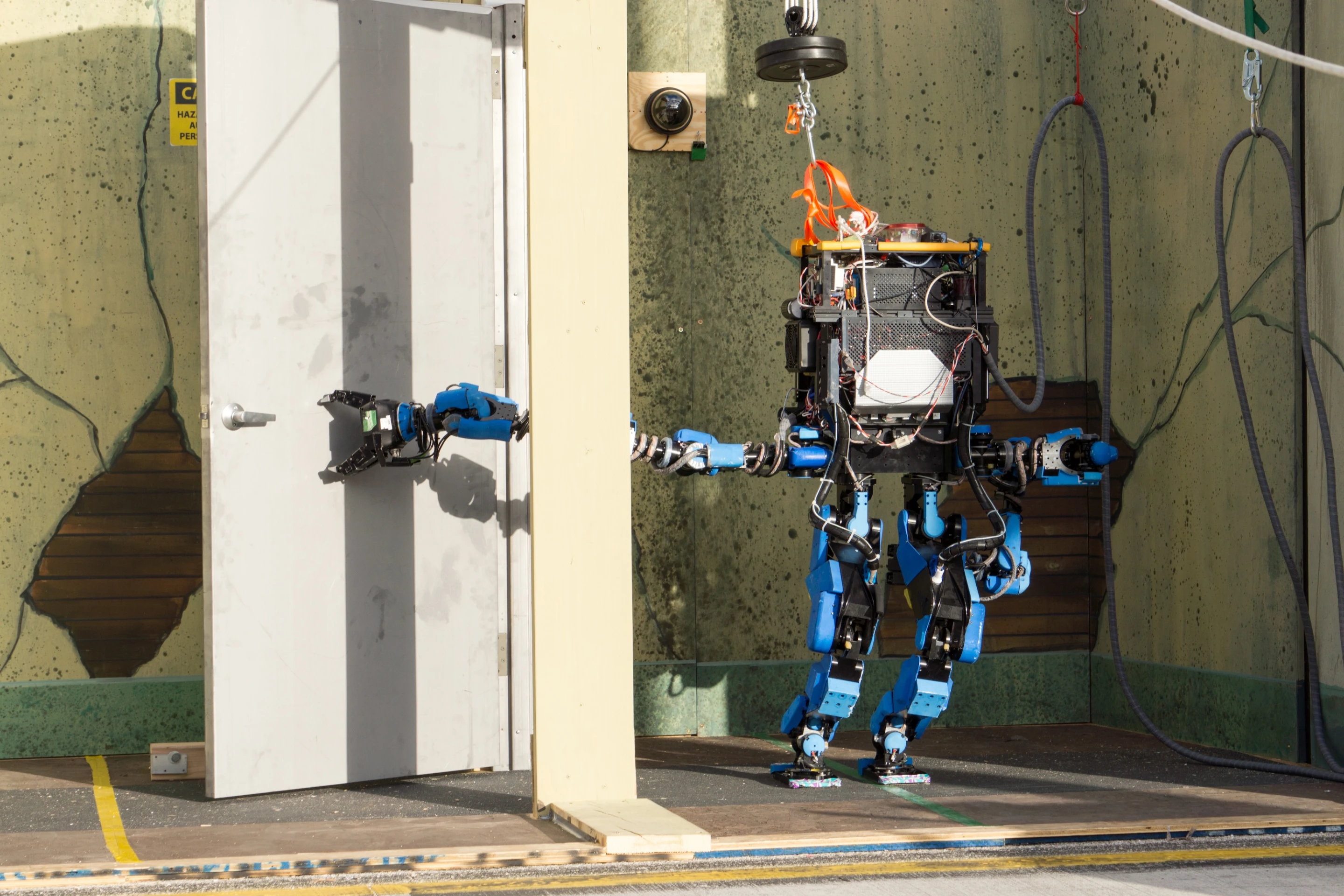
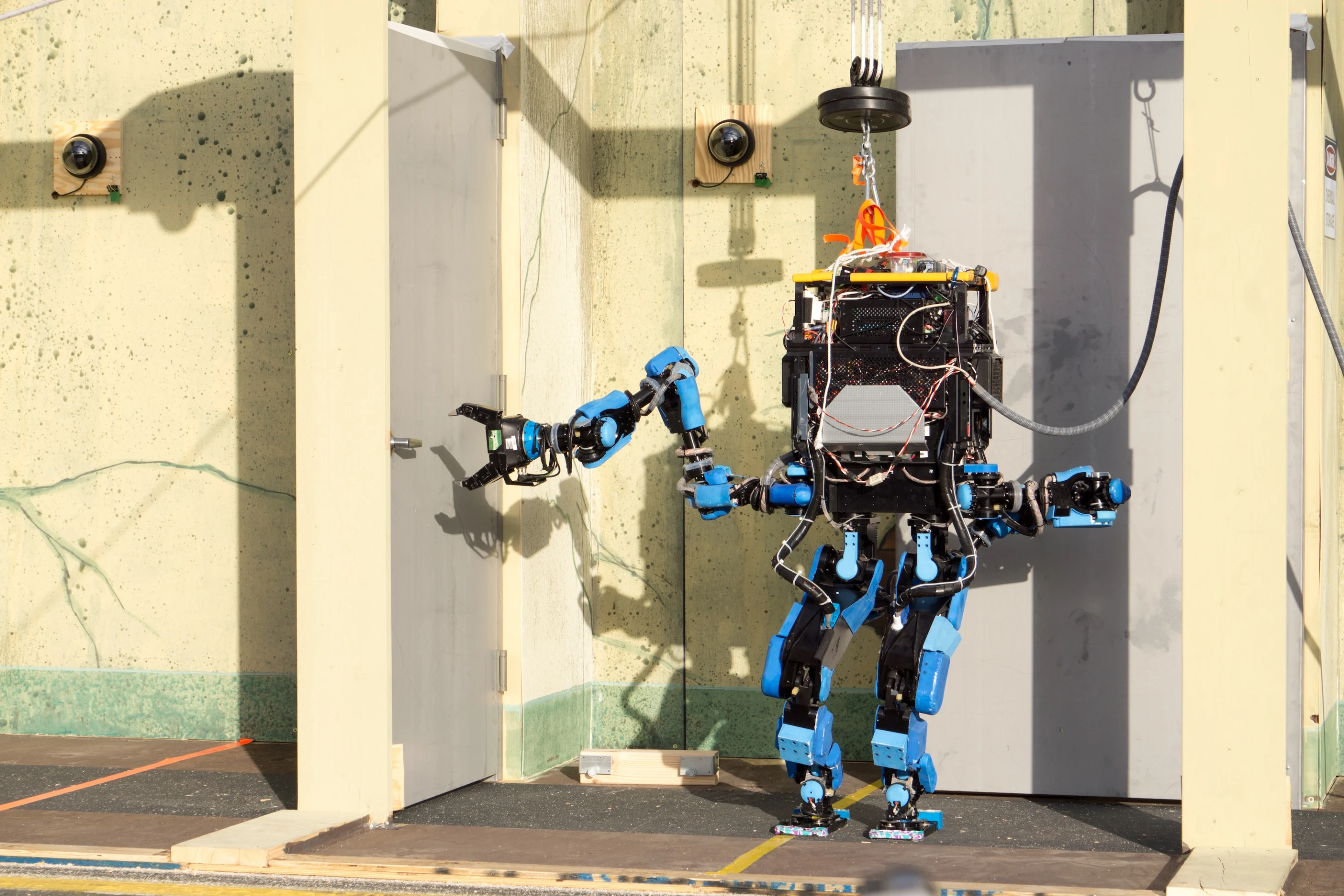
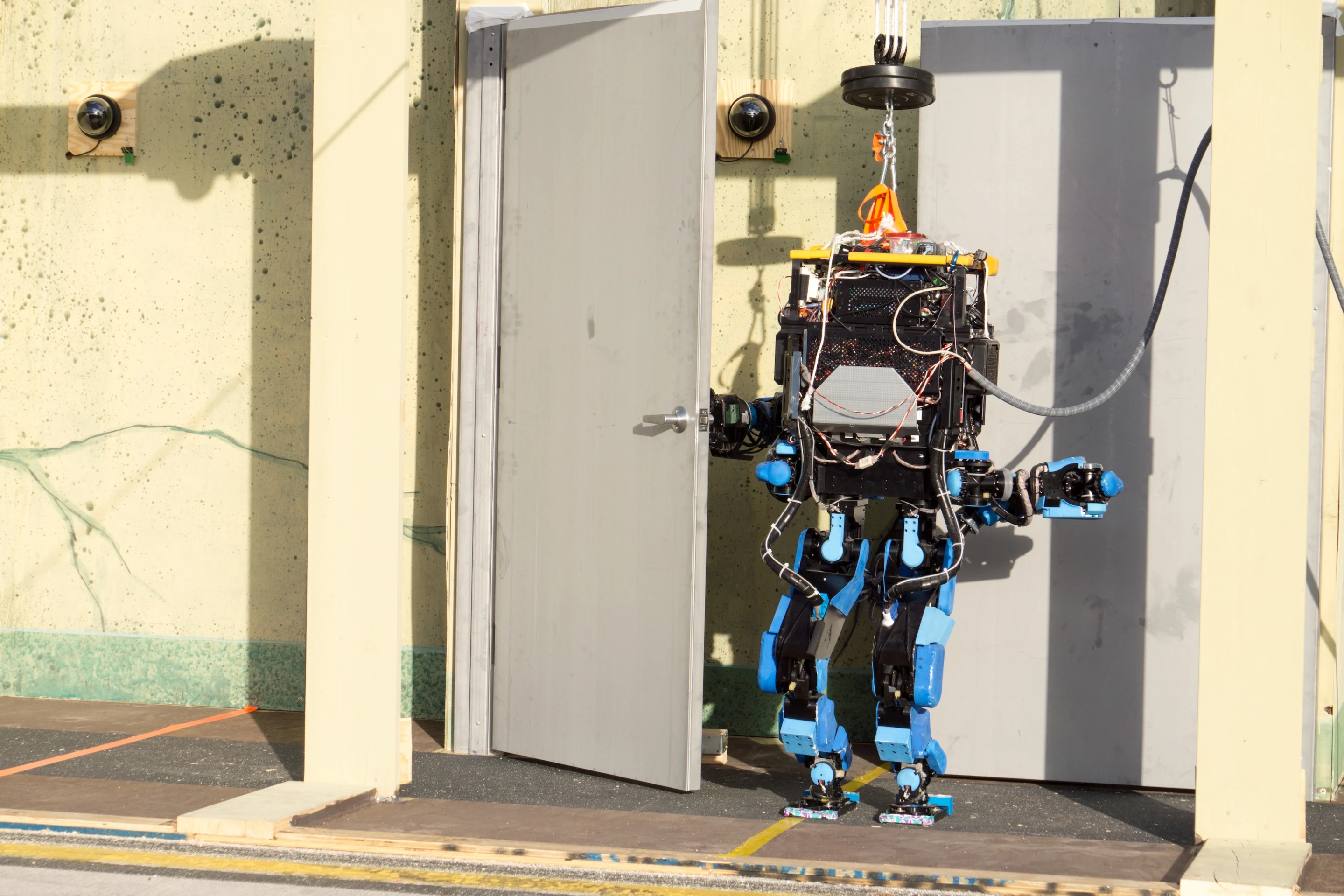
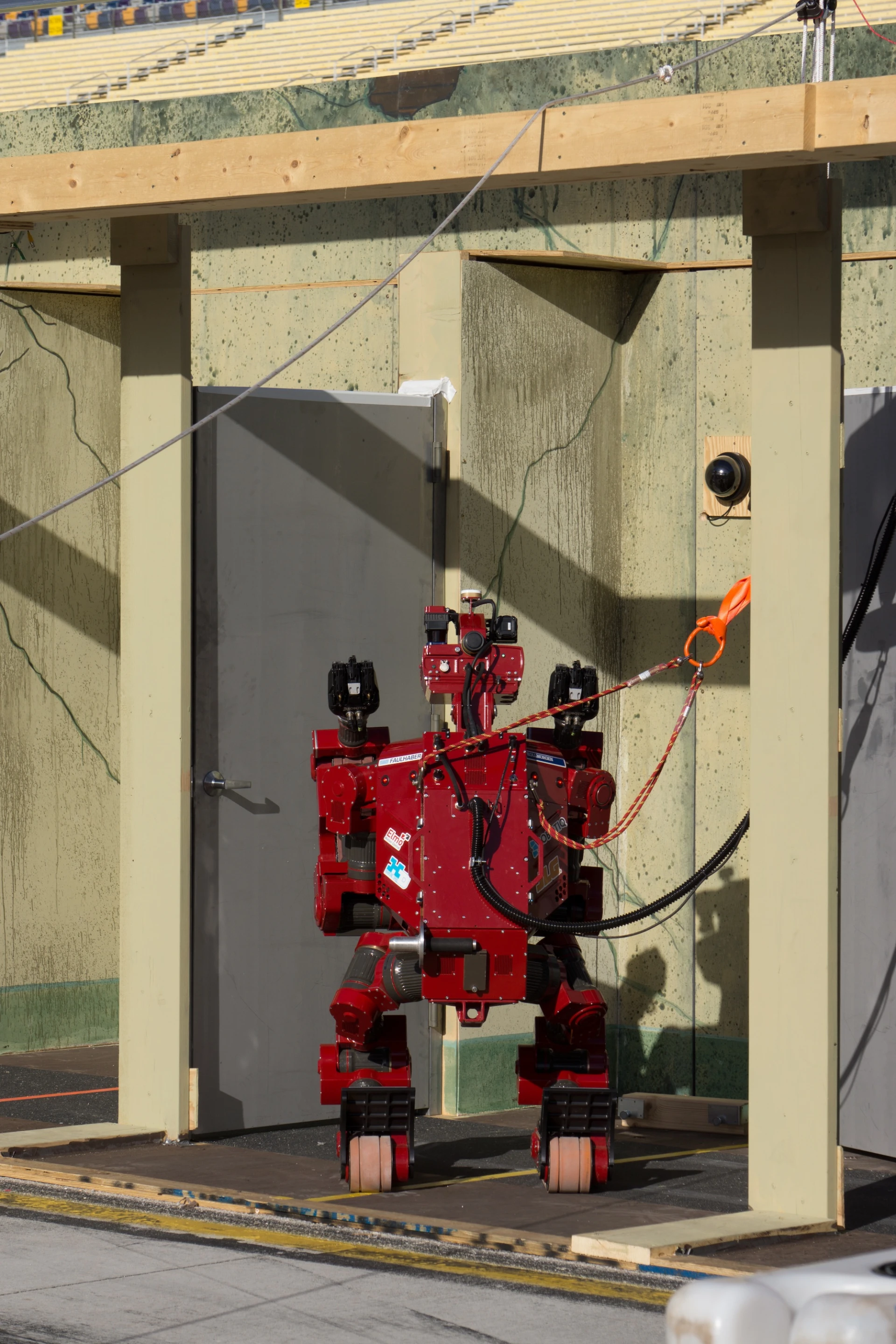
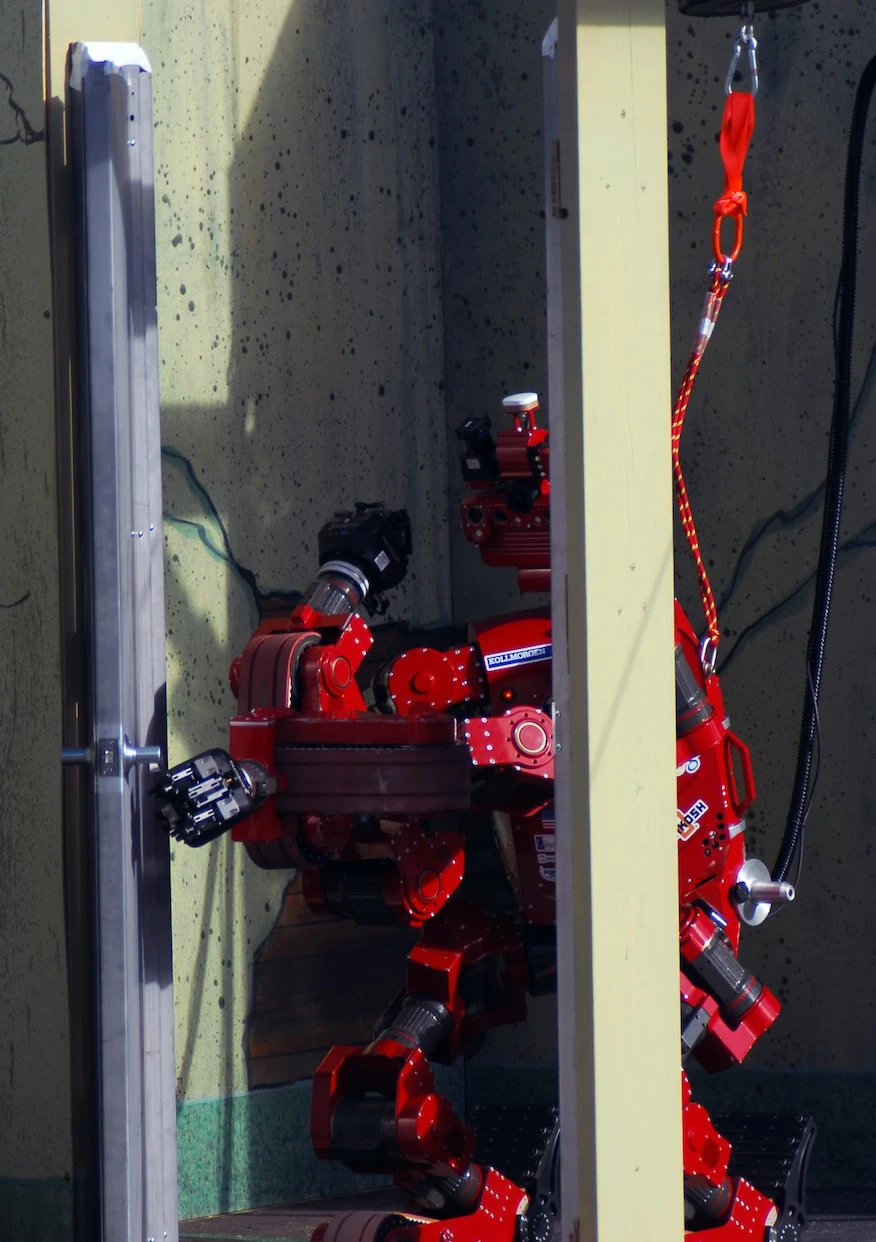
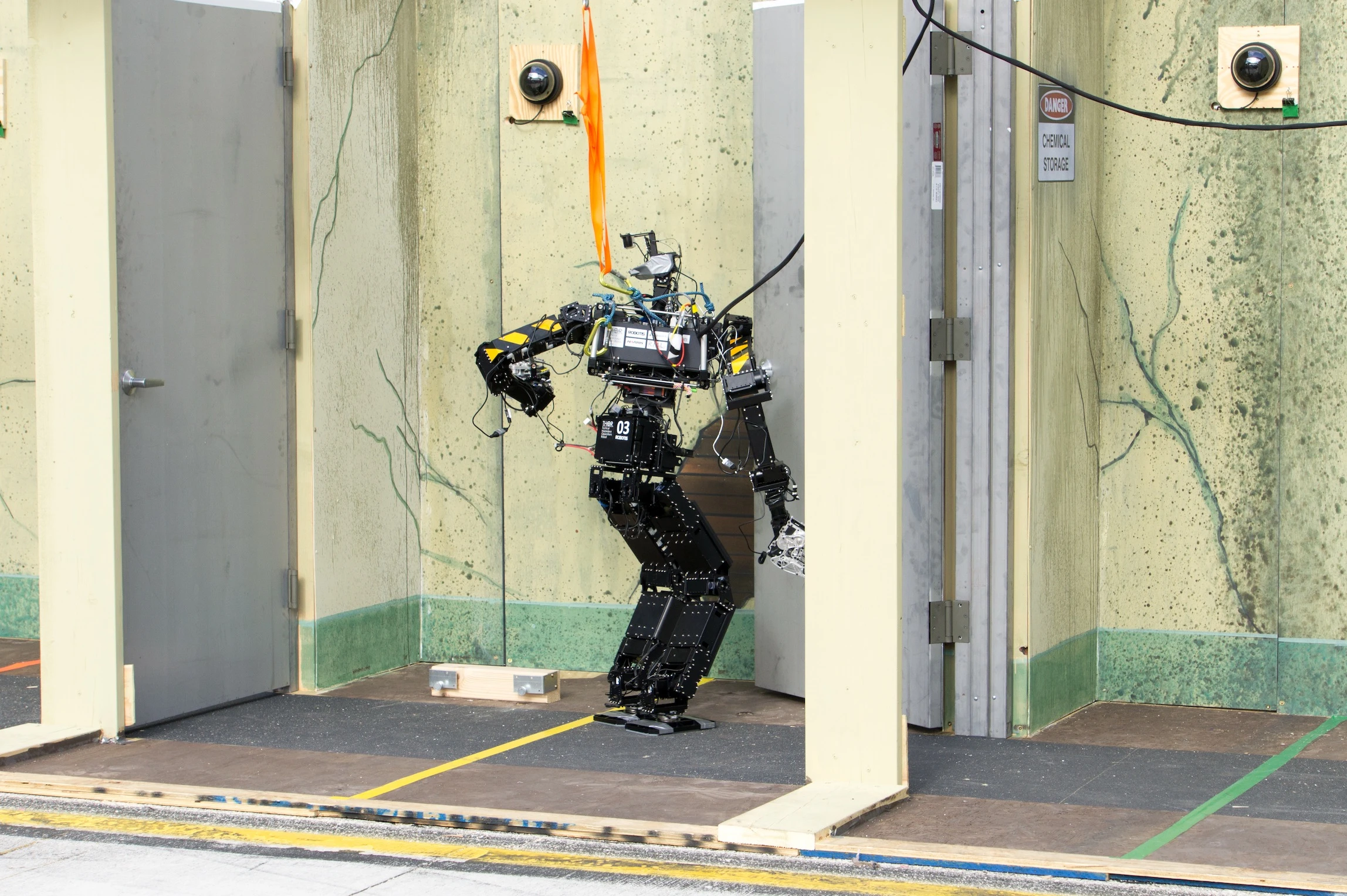
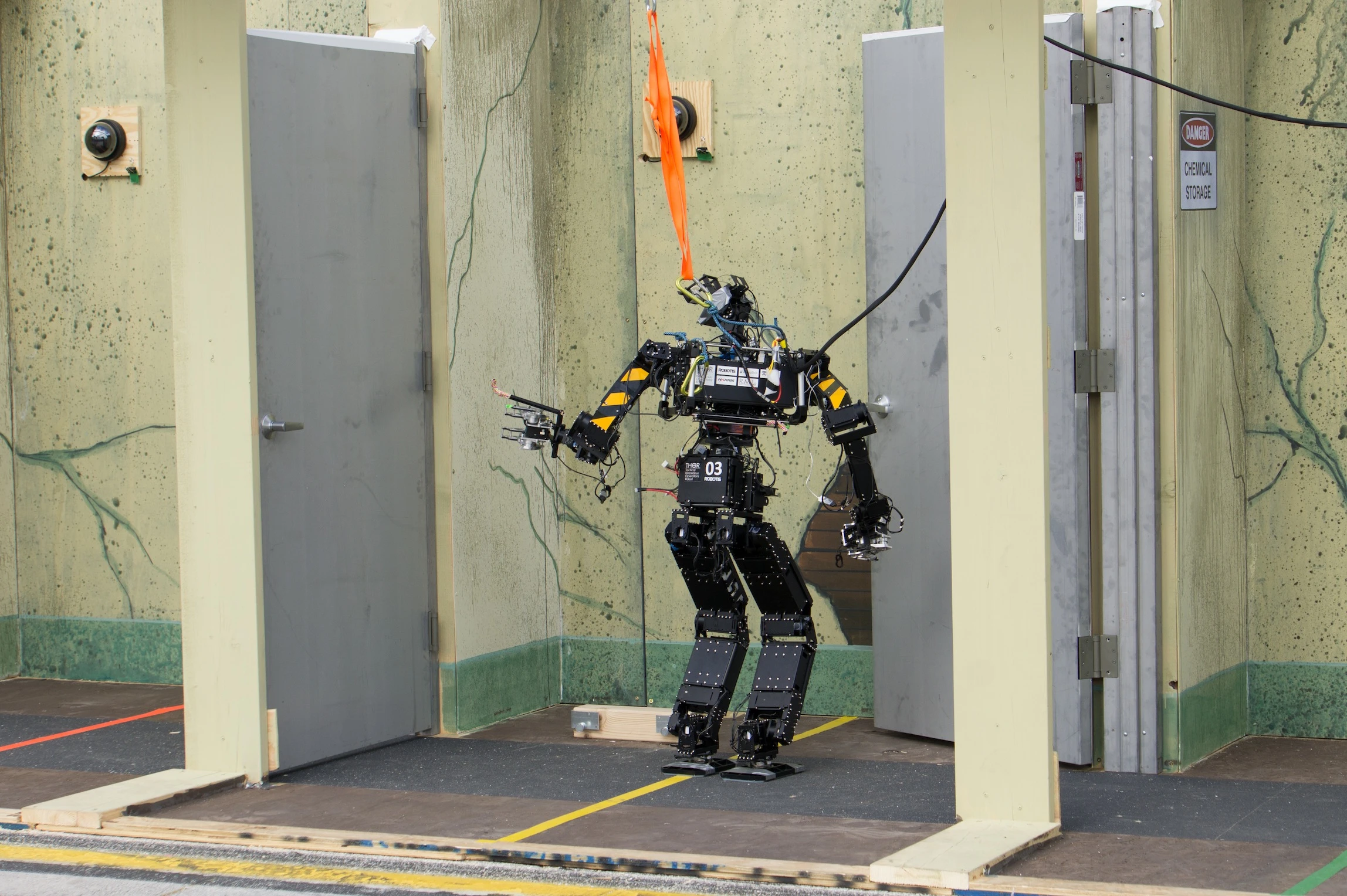
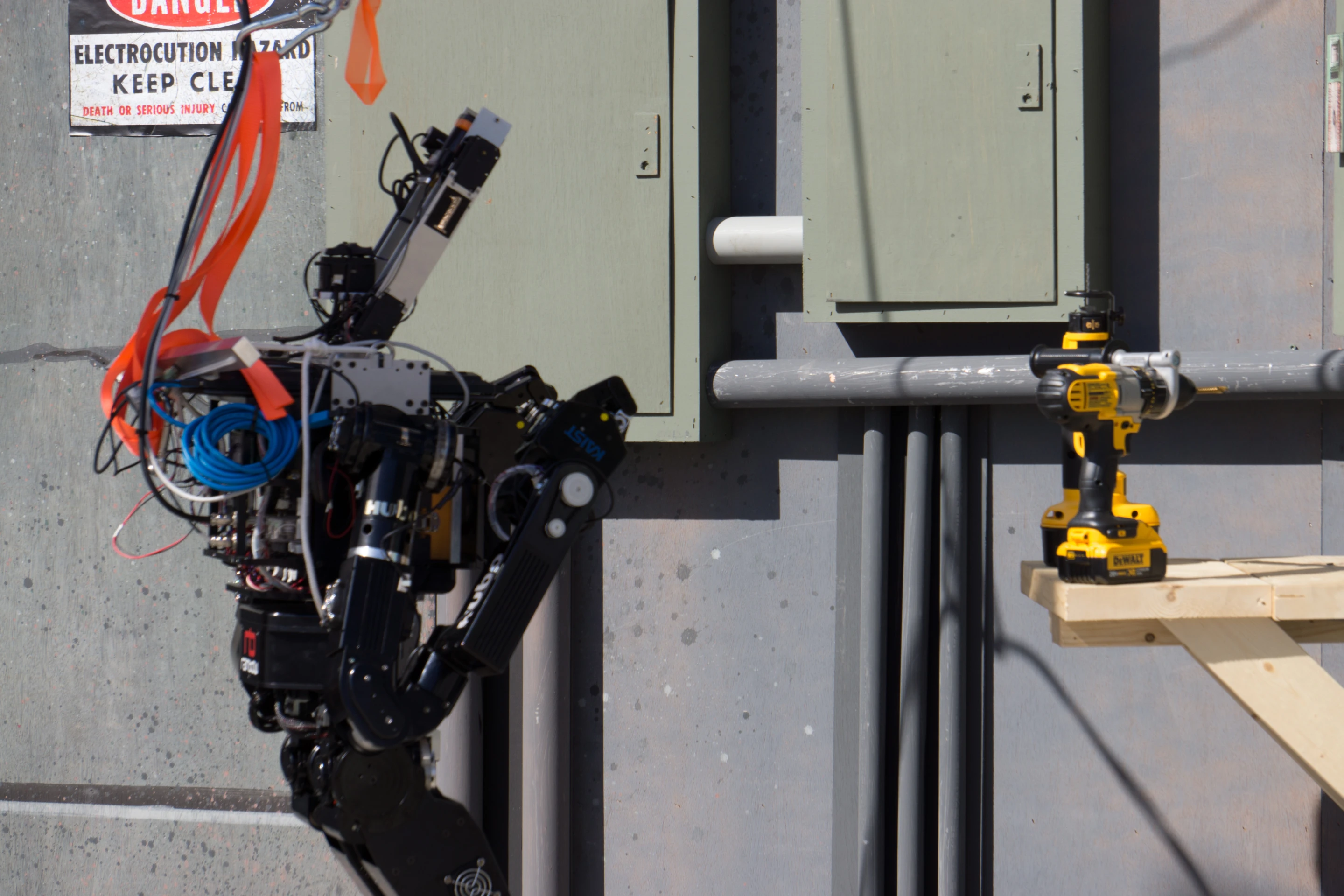
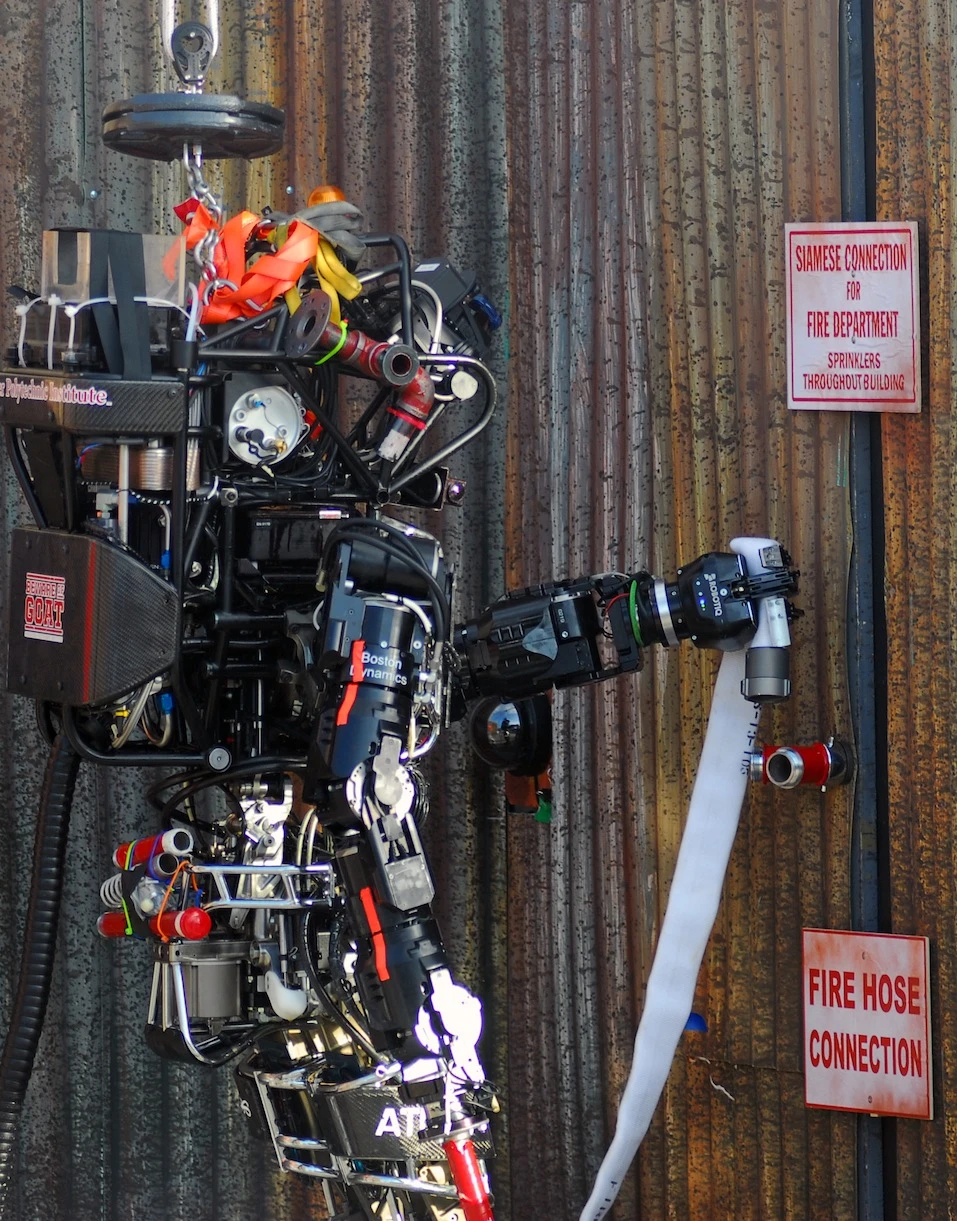
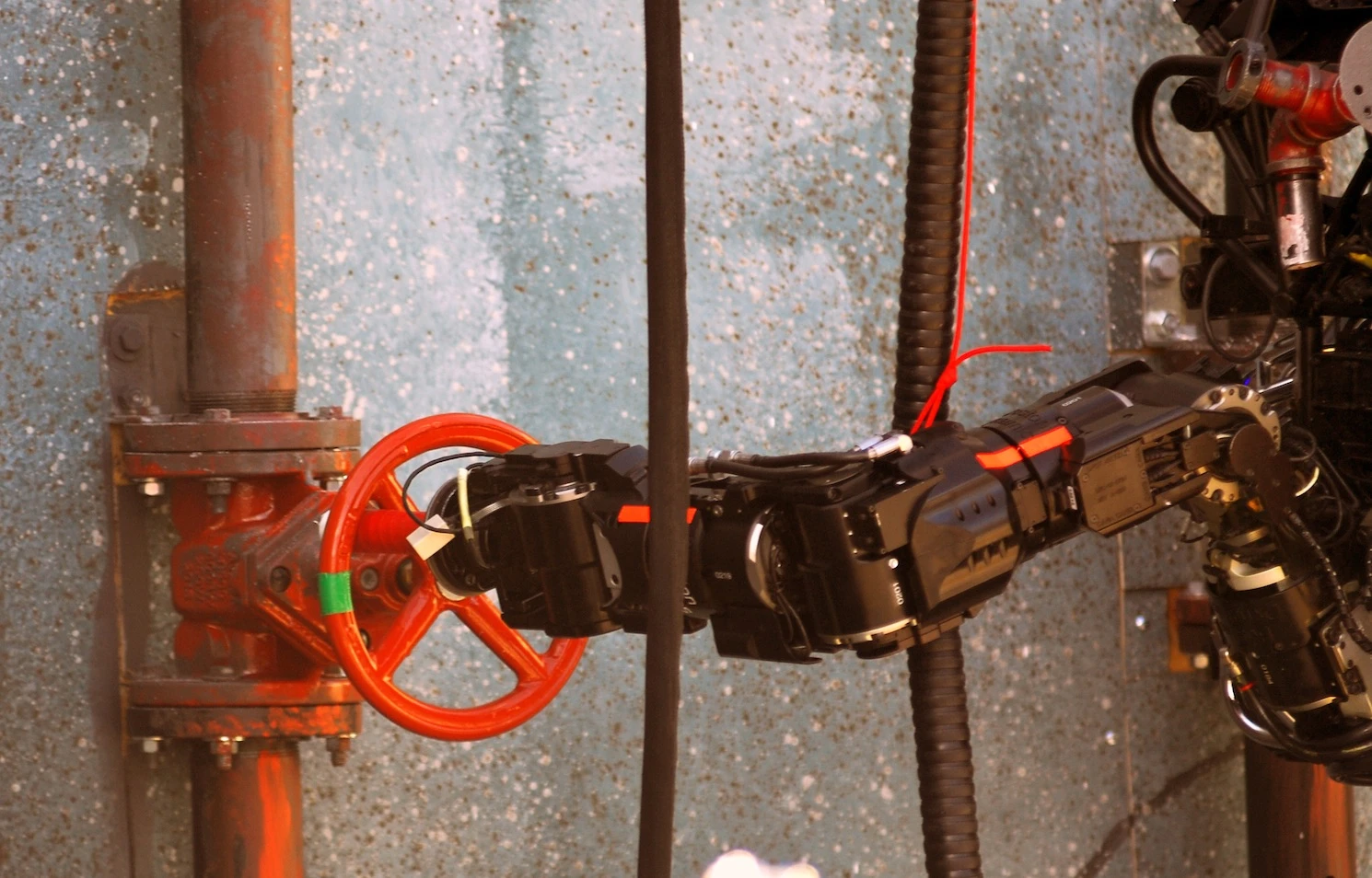
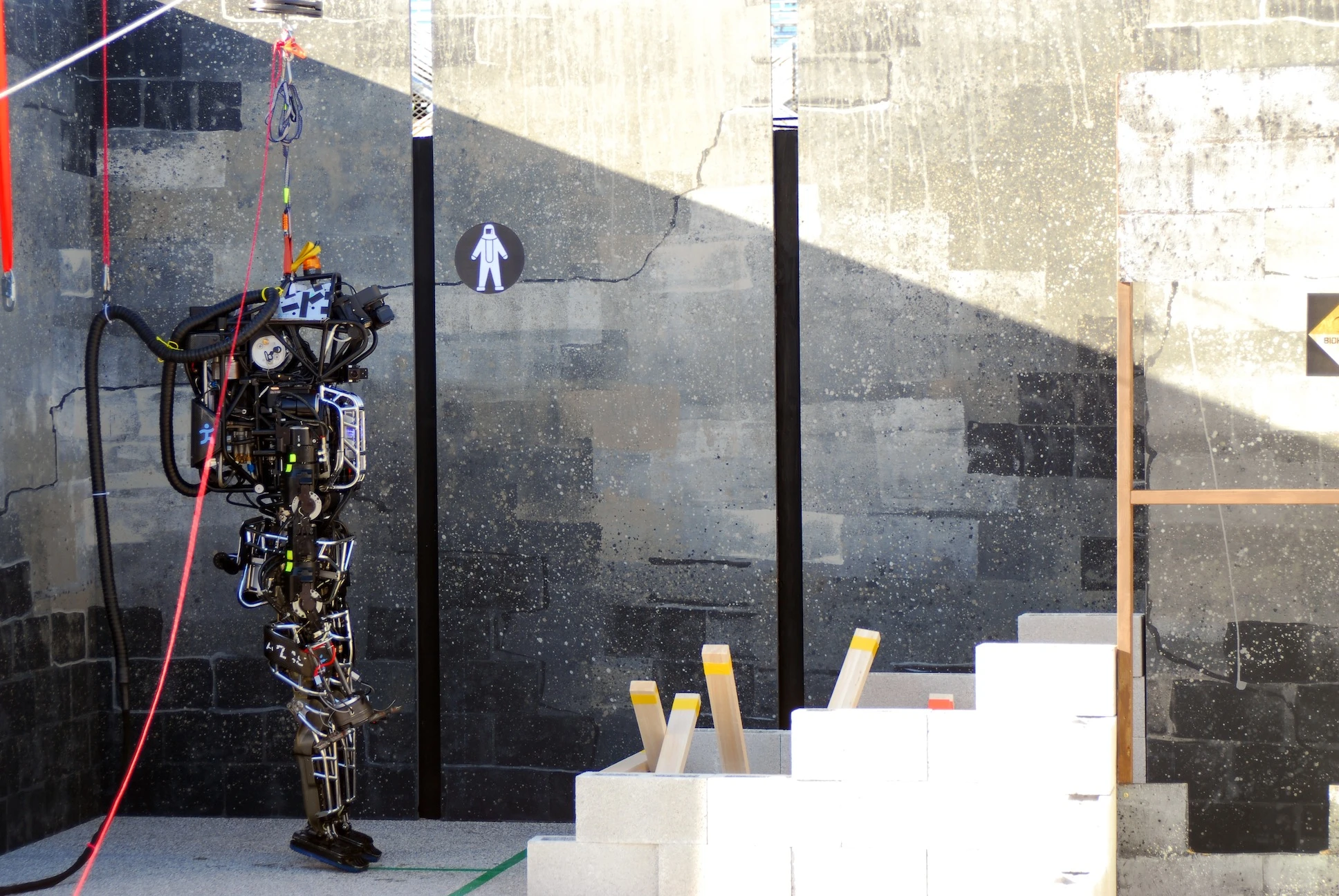
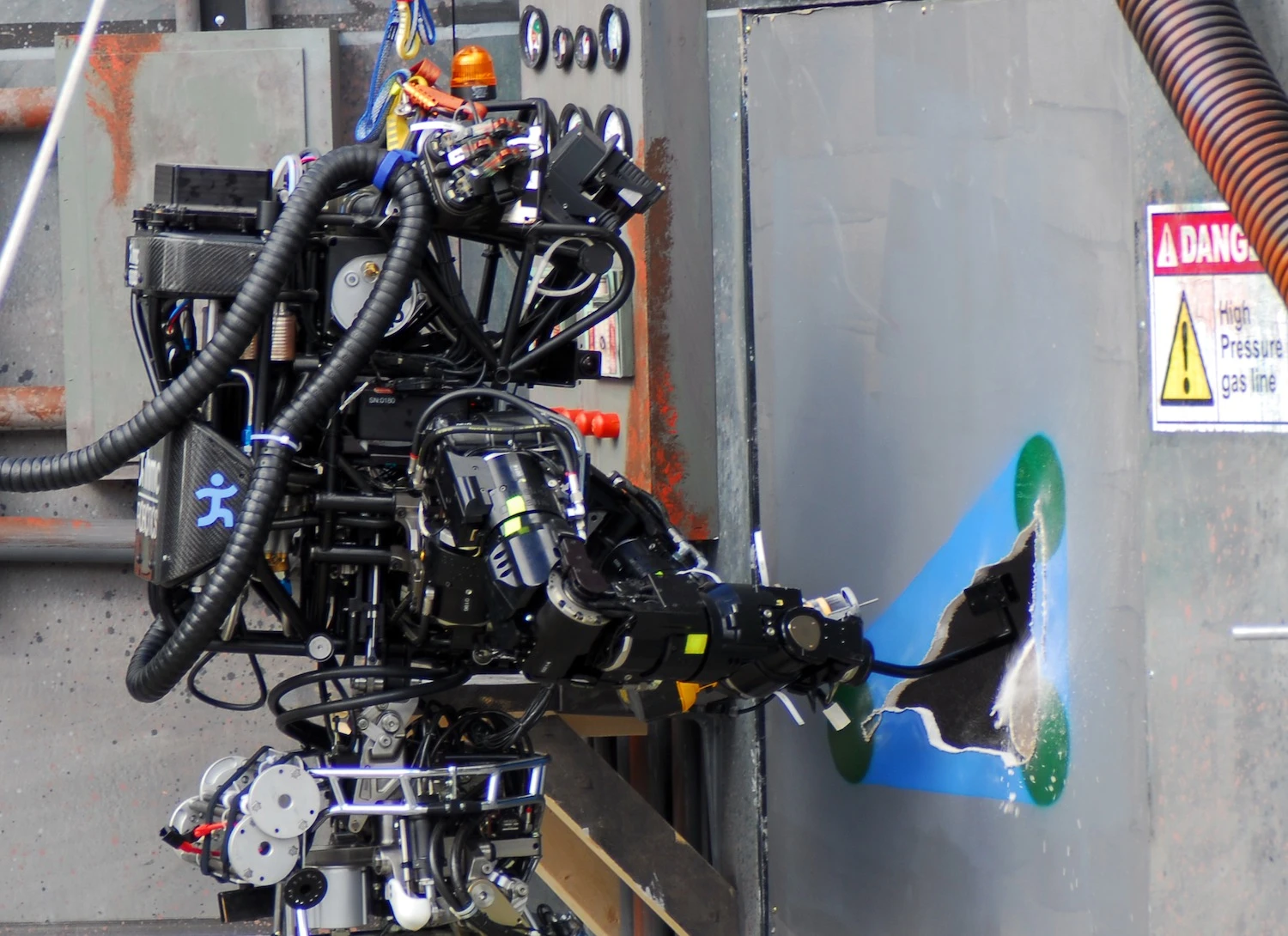
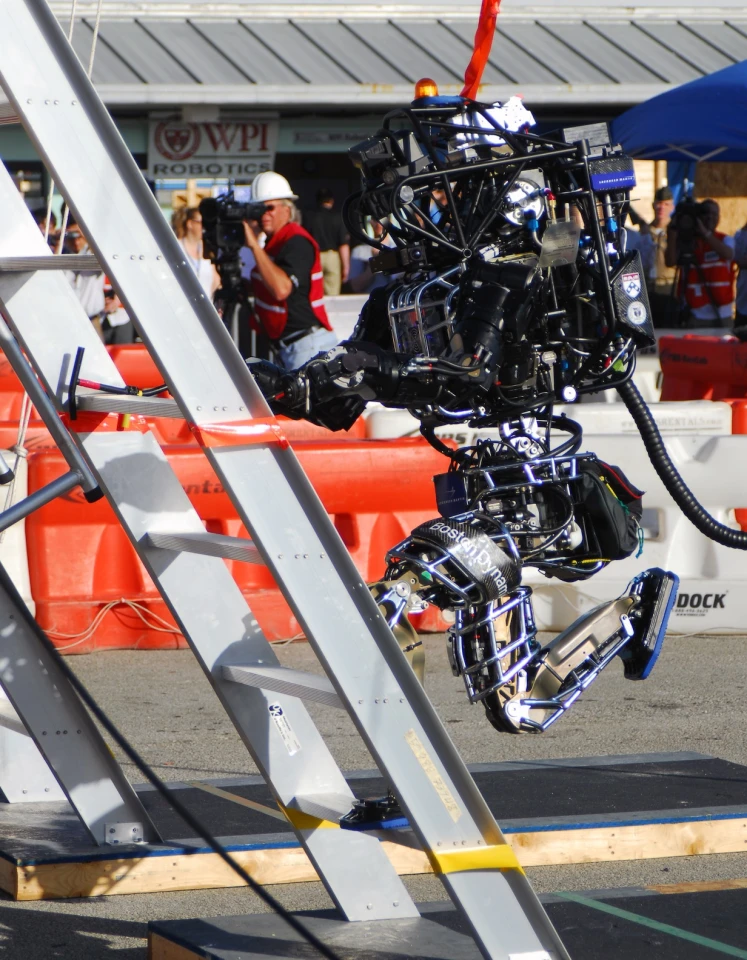
The next test was to walk across rough terrain, represented by ramps and piles of breeze blocks. Then the robots had to remove debris from in front of a doorway and go through the door. Next was opening and going through a series of doors, then climbing an industrial ladder, cutting through a wall, carrying and connecting a fire hose, and, finally, closing three valves.
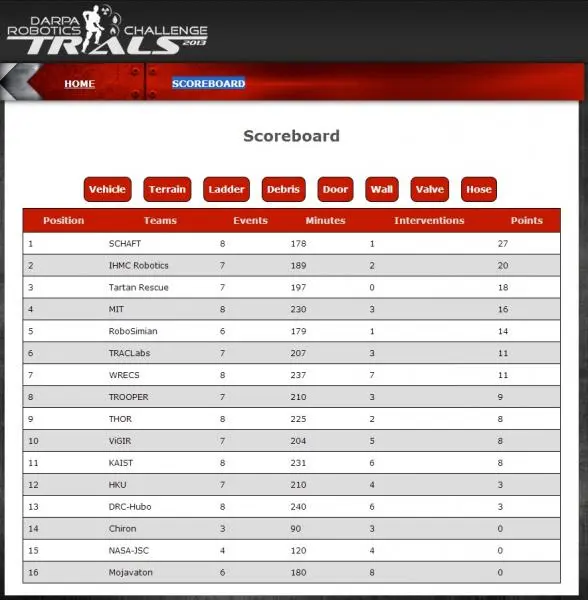
After day two was completed, the results were released:
- Schaft: 27 points
DARPA says that the point of the competition is to provide a baseline from which to develop robotics for disaster response. Events such as the 2011 Fukushima nuclear disaster demonstrate that robots have a part to play in relief operations. The massive earthquake and tsunami in Japan, which not only damaged the reactors, but made it impossible for crews to respond in time. DARPA believes that robots that could navigate the ruins and work in radioactive environments would have been of great help.
The problem is that current robots aren’t up to task. Specialized robots can’t be built to deal with the unpredictable, while full telepresence control is neither practical nor desirable, and most robots tend to be a bit on the delicate side. What’s needed is a robot that can work on its own, use tools and vehicles at hand, deal with the unpredictable, and is durable and agile enough to operate in the ruins of a building.
That’s where DRC comes in. DARPA will use the results of the competition to draw a baseline that will benefit engineers working on the next generation of robots. For now, the top eight of the teams go on with DARPA funding to compete in the Robotics Finals event late next year, for a US$2 million prize.
The video below is a recap of the second day of the trails.
Source: DARPA Robotics Challenge Trails 2013






