
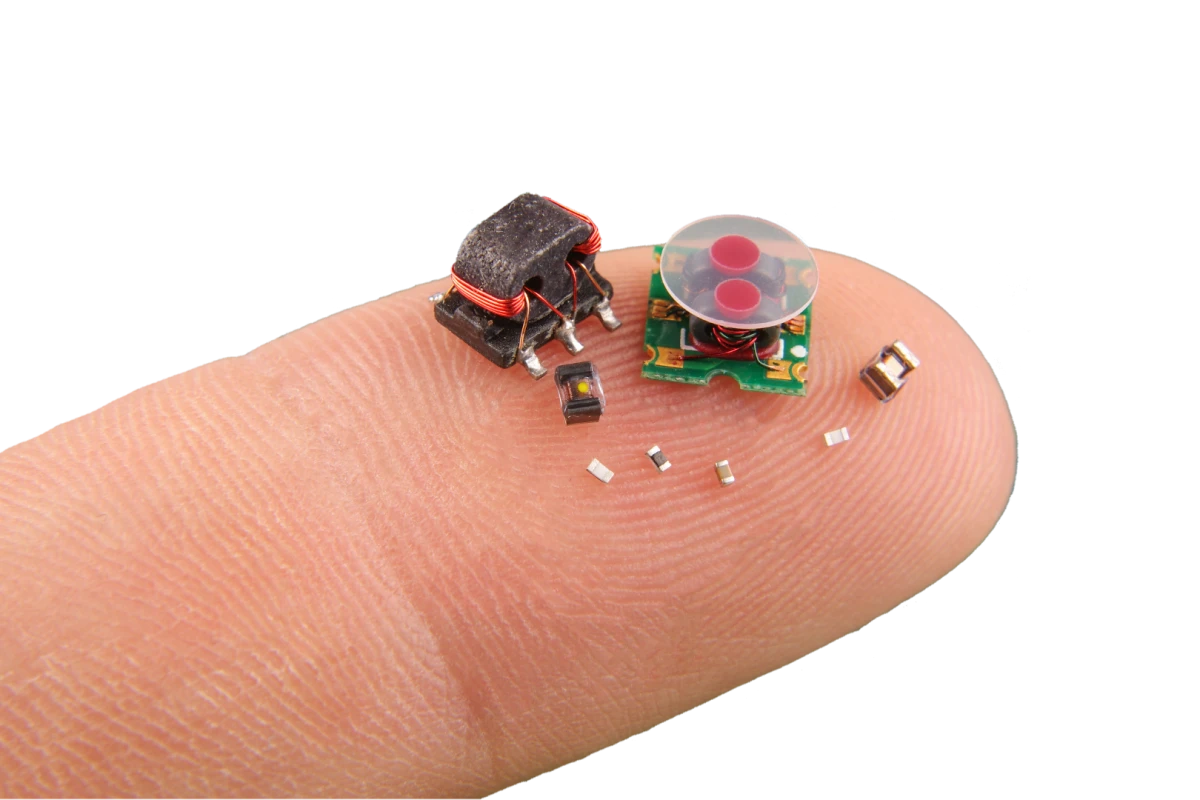
Sometimes big problems require little robots, so DARPA has instituted a new program to advance the technologies needed to build micro-robots on the millimeter to centimeter scales. The goal is to produce new power, navigation, and control systems that would allow such microbots to enter and search the holes and crevices left by natural and manmade disasters that are too small and dangerous to be dealt with by human responders or larger robotic platforms.
Modern robots have already sparked a mini revolution, finding their way into everything from the battlefield to the burger bar, but there is literally no one-size-fits-all solution when it comes to using robots in disaster areas. True, large robots can go into areas that are too hazardous for humans and carry out useful work like clearing debris or closing off valves, but if they cannot get to where they're needed, then they might as well be scrap metal.
One way of getting robots to the right place is to make them smaller so they can squeeze through tiny cracks and crevices in rubble. Though one microbot might not be able to accomplish much, a swarm of tiny robots designed to carry out various tasks can potentially do a lot. However, by shrinking robots, they don't just become simpler, they also encounter some significant technical barriers.
According to DARPA, microelectromechanical systems (MEMS) have already advanced the case for the microbot as engineers now have 3D printing, piezoelectric actuators, and low-power sensors to play with. Unfortunately, microbots still face problems in the fields of power, navigation, and control due to size, weight, and power (SWaP) constraints.
In hopes of overcoming these limitations, DAPRA has established the new SHort-Range Independent Microrobotic Platforms (SHRIMP) program to develop multi-functional micro-to-milli robotic platforms by working on new power sources, new materials, and mechanisms for actuators to improve the strength, dexterity, and independence of microbots.
For actuators, SHRIMP looks to boost the strength-to-weight ratio to improve load bearing and endurance. This way, microbots will be able to carry out complex, gruelling tasks for longer periods of time.
Because most microbots currently rely on tethers for power, control, and data processing, SHRIMP is seeking to develop more energy-efficient, high-voltage power conversion circuitry, as well as batteries and other power storage devices to make the microbots more independent, yet have the ability to support more powerful actuators. One particular goal is to produce power converters that can handle frequencies in the tens of Hertz range with exceptional efficiency.
To achieve these goals, SHRIMP will be modelled on the National Institute of Standards and Technology (NIST) Robotics Test Facility, with development teams competing in "Olympic-style evaluation" to test each microbot's various capabilities, including mobility, capacity to maneuver on level and inclined surfaces, load bearing, and speed.
"Whether in a natural disaster scenario, a search and rescue mission, a hazardous environment, or other critical relief situation, robots have the potential to provide much needed aide and support," says Ronald Polcawich, a DARPA program manager in the Microsystems Technology Office (MTO). "However, there are a number of environments that are inaccessible for larger robotic platforms. Smaller robotics systems could provide significant aide, but shrinking down these platforms requires significant advancement of the underlying technology."
Source: DARPA






