
Tiny quadcopter drones, or micro air vehicles (MAVs), have notoriously short battery lives. So, if they can "perch" somewhere instead of hovering in mid-air, more power to them. A new gripper mechanism has been designed with that in mind.
Developed by a team of engineers at Colorado State University, the device is mounted on top of a third-party MAV. It has a vertical plunger-like pad in the middle, which is mechanically linked to two diagonally raised folding arms, one on either side. At the top end of each arm is an inward-facing gripper pad.
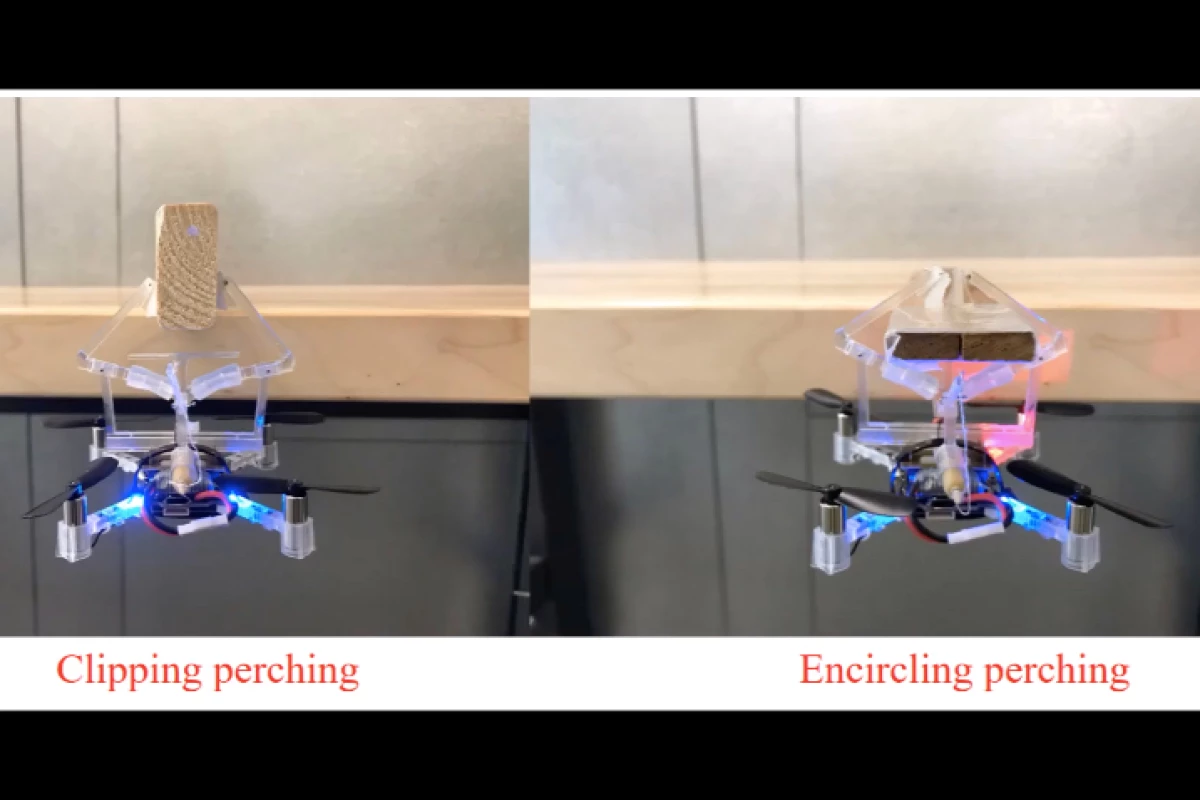
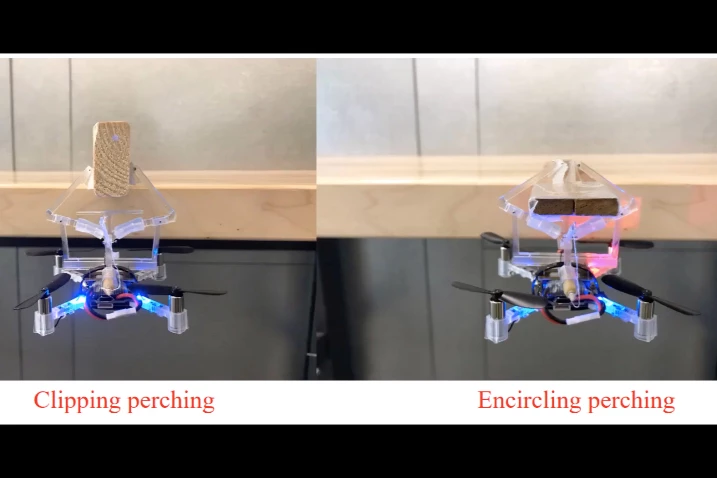
When the MAV flies up against the underside of a horizontal object such as a tree branch, pipe or railing, the force of impact pushes the pad down. This in turn causes the two arms to fold inward, clasping the object, and holding the drone in place. Its propeller motors can then be turned off until it needs to fly again.
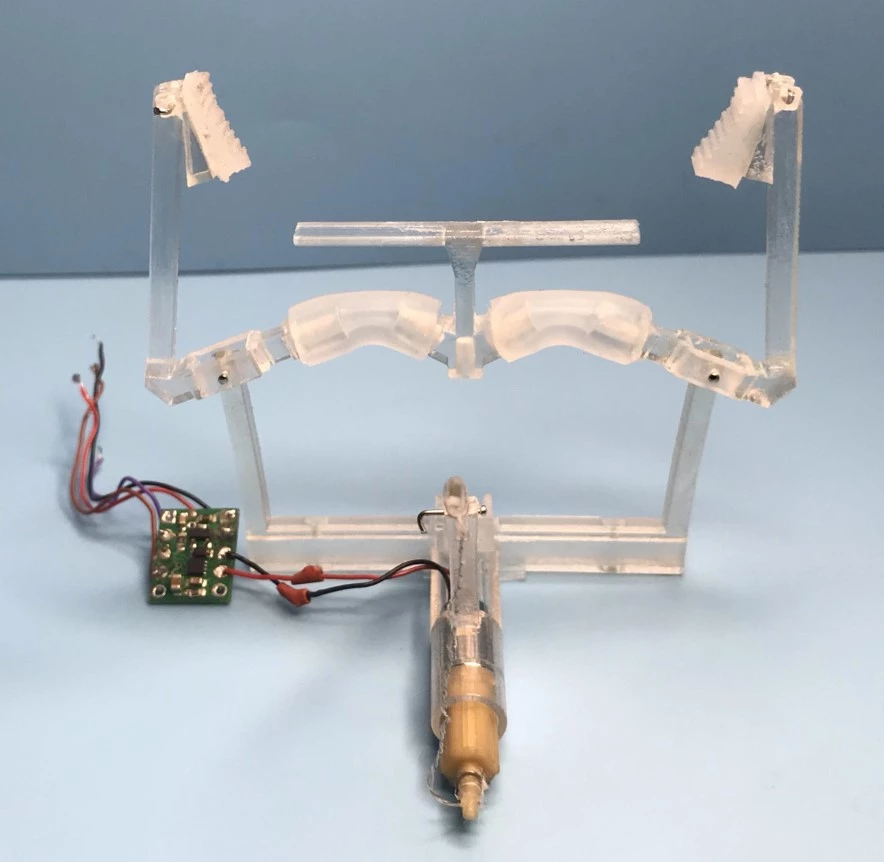
Depending on the diameter of the object, the arms can either grasp it on either side with their gripper pads, or encircle it and meet together on top. In either case, the grasping action is entirely mechanical, requiring no electricity. A small amount of power is required to move the arms back apart, when it's time to drop down and resume flight.
"Although our bistable gripper is used with a palm-size quadcopter, the design strategy can also be applied to large-size MAVs for both energy-efficient perching and aerial grasping," says team member Dr. Jianguo Zhao.
The gripper is demonstrated in the video below, and is described in a paper that was recently published in the journal IEEE Explore.
And this certainly isn't the first drone-perching technology we've seen. Other examples have included systems that allow MAVs to land on wires, cling to walls, or even set down on a human hand.
Source: Colorado State University


