


Quadcopter drones may be agile but they're also relatively wide and delicate, limiting their potential uses. The Morphy drone addresses these drawbacks with flexible propeller arms which allow it to basically just squeeze its way through narrow spaces.
Currently in functional prototype form, the Morphy was created by Kostas Alexis, Morten Christian Nissov and Paolo de Petris at the Norwegian University of Science and Technology's Autonomous Robots Lab.
At first glance, the custom-built aircraft looks much like any other compact quadcopter that's equipped with wraparound propeller protectors. Each of the drone's propeller arms, however, is connected to the main body via a 3D-printed elastomer joint. Inside each of those joints is a 3D Hall-effect sensor.

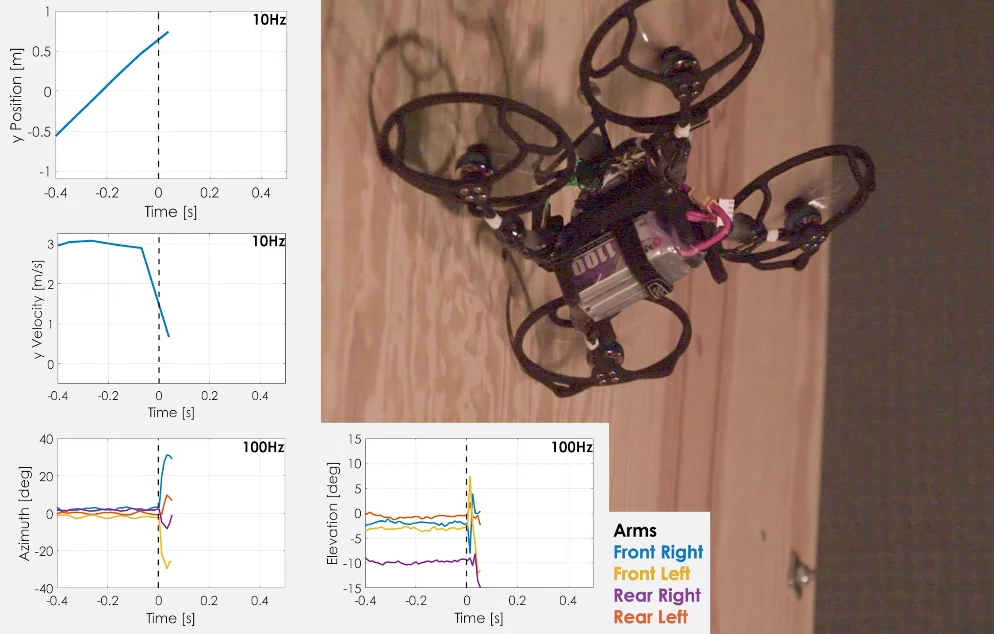
When any of the propellers come into contact with an unyielding surface, the joint in the prop's arm allows it to bend back instead of breaking. The sensor in that arm measures the direction and extent of the bend, and relays that data to the Morphy's onboard 8-core microprocessor. That processor responds by adjusting the thrust of all four propellers to compensate for the deformation, keeping the aircraft stable and airborne.
This functionality lets the copter squeeze through both horizontal and vertical gaps which are narrower than its own body. As an added bonus, the drone can also withstand impacts with walls or other obstacles at forward speeds of up to 3 meters (9.8 ft) per second.
"Collisions that previously had to be avoided have now become acceptable risks, while areas that are untraversable for a certain robot size can now be negotiated through self-squeezing," state the researchers. "These novel bodily interactions with the environment can give rise to new types of embodied intelligence."
Previously developed experimental drones have taken a decidedly different (and likely more mechanically complex) approach to getting through gaps, by folding their propeller arms inward to make themselves narrower.
In its present form, the Morphy drone weighs 260 g (9.2 oz), is 252 mm wide (9.9 in), and can fly for over 12 minutes and 30 seconds per battery-charge. Along with its Hall-effect sensors, it's also equipped with both optical and time-of-flight depth-sensing cameras.
You can see it in action, in the video below.
Source: Autonomous Robots Lab via IEEE Spectrum


