



Japanese researchers have built on last year's disaster relief excavator to create a remotely-operated construction prototype with two arms that can rotate 360 degrees around its central pod, giving it multitasking capabilities. The team has also developed a four-fingered "hand" that should help the robot get to grips with heavy duty construction work.
Developed to solve remote operation and mobility problems of existing heavy construction equipment used in disaster relief, the prototype features two hydraulic arms able to swing 360 degrees around a shared central axis. This setup is reported to give the robot a "high degree of stability" during high load, heavy duty work while also allowing for operational flexibility, as shown below.
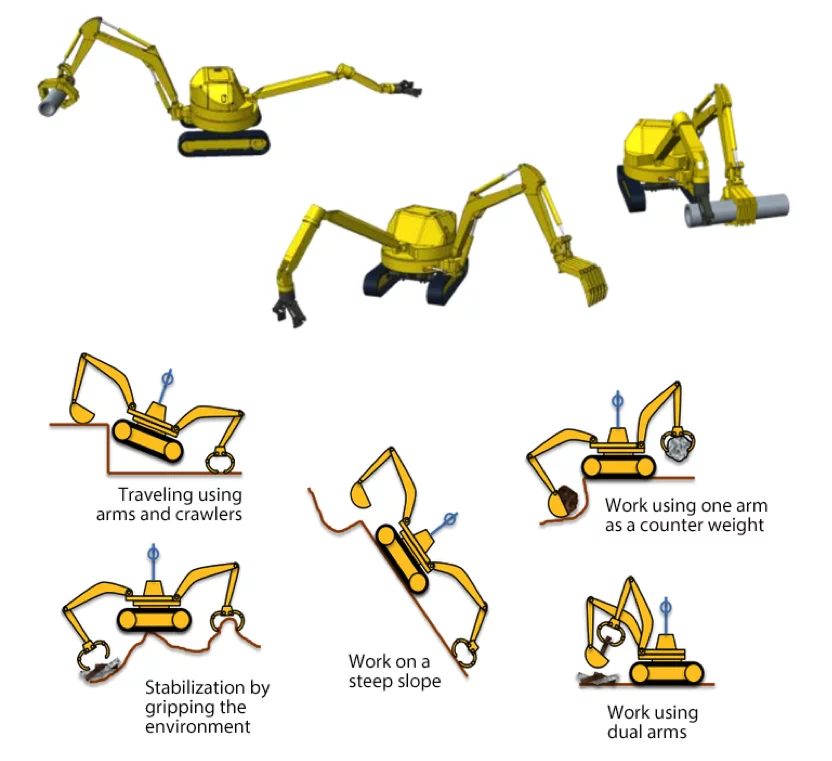
The team has developed a dual-function, four-fingered attachment for the construction robot, which can operate as a gripper for picking up debris or as an excavator to shovel out rubble. The operator can dial in different grip strengths and its shape can be altered to suit the task at, erm, hand.
As with the previous robot, force feedback gives the operator a sense of touching target objects. An view from above and around is also supplied by a multi-rotor drone that feeds live video to the controller, meaning there's no need for cameras to be mounted on the robot itself.
The prototype was developed under the Tough Robotics Challenge of the Impulsing Paradigm Challenge through Disruptive Technologies Program by a team comprising members from Osaka University, Kobe University, Tohoku University, Tohoku University, The University of Tokyo, and Tokyo Institute of Technology.
The next step is to further improve and refine the design prior to its introduction into the disaster relief toolkit.
Source: Osaka University





