




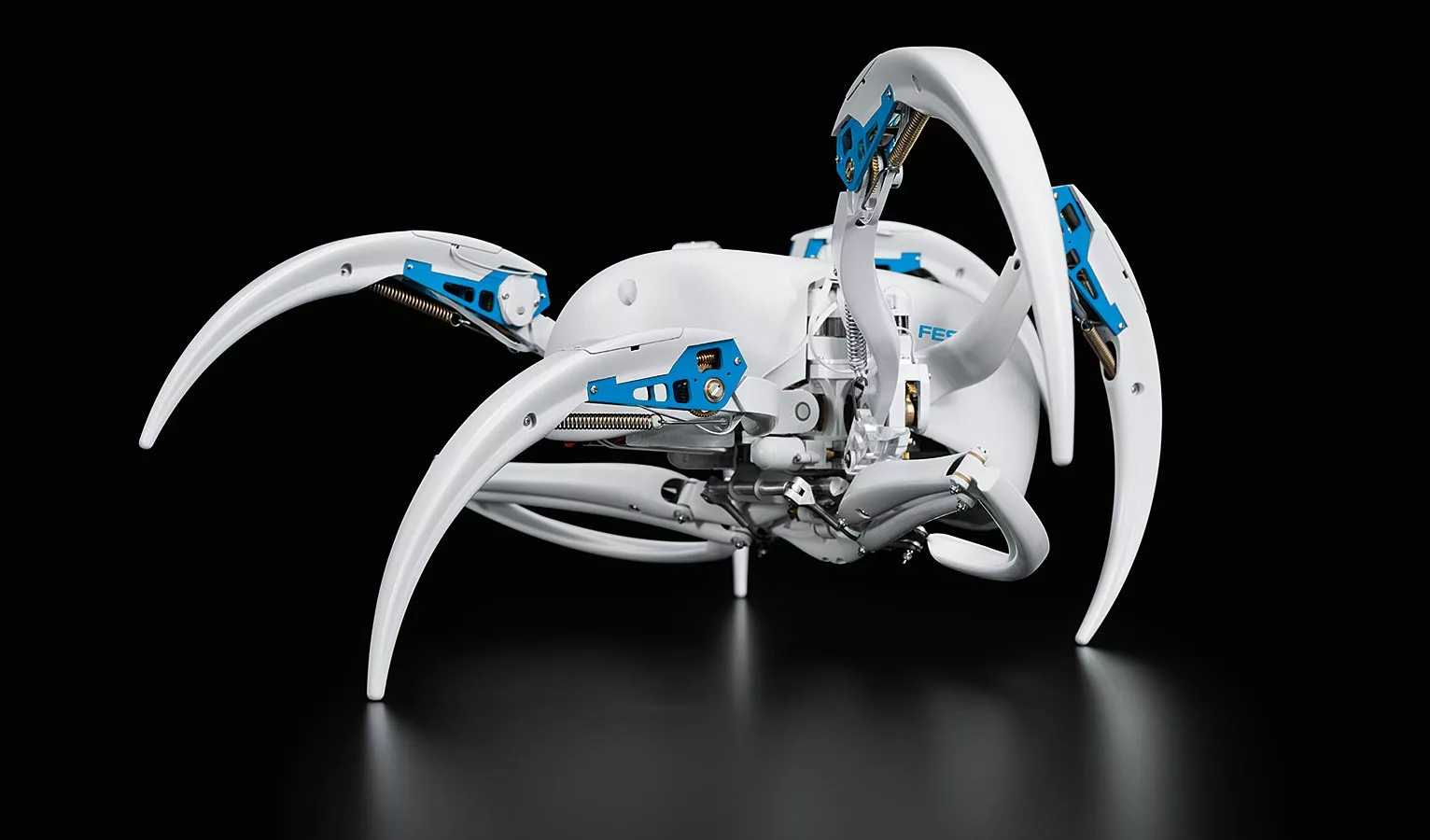








Festo, the German electrical automation company that previously brought us a robotic dragonfly, kangaroo and penguin, is back with a couple of new creations – a spider that can roll like a wheel, and a bat that flies by autopilot.
Reminiscent of the Star Wars battle droids, the BionicWheelBot robotic spider was actually inspired by the flic-flac spider (cebrennus rechenbergi). In its native Sahara Desert habitat, that spider walks normally on uneven ground, but rolls/somersaults across smooth terrain – doing so is twice as fast as walking.
Ingo Rechenberg, who is a professor of bionics at the Technical University of Berlin, first discovered the spider in 2008. Since then, he has designed various robots that utilize its form of locomotion. For the BionicWheelBot, he collaborated with members of Festo's bionics team.

Equipped with 15 motors and remotely-controlled via a tablet, the robot moves along on six of its spring-loaded legs when in walking mode, with the other two folded up beneath its body. When it's time to roll, those six walking legs fold to transform into two "wheels," while the two previously-folded legs extend out to either side to push the rolled-up robot along – an onboard inertial sensor allows it to know what position it's in, so it knows when to push off again.
In this configuration, like its biological counterpart, the BionicWheelBot can travel much faster than it can while walking.

Festo's BionicFlyingFox, as its name implies, was inspired by the flying fox (aka fruit bat). Weighing just 580 g (20.5 oz), the robot has a 3D-milled foam body and a carbon fiber skeleton.
Its wings fold independently, and are covered in one continuous "wafer-thin" membrane. That layered membrane is made up of two airtight films and a knitted elastane fabric, which are spot-welded together at about 45,000 points. The fabric has a honeycomb pattern that prevents small cracks from propagating, meaning that the robot can still fly even with minor damage to the membrane.
A human operator manually performs the BionicFlyingFox's take-offs and landings via remote control. While it's in flight, however, an autopilot system takes over. This incorporates two ground-based infrared cameras, which automatically pan and tilt to follow four infrared LEDs located on the robot's legs and wing tips.

Images from the cameras are sent to a central master computer, which in turn acts like an air traffic controller. Based on the robot's current orientation and its location within the flight space, the computer plans a flight path and transmits commands to the BionicFlyingFox. The wing movements required in order to carry out those commands are calculated by the robot itself, using onboard electronics.
Both of the Festo robots can be seen in action, in the following two videos.





