
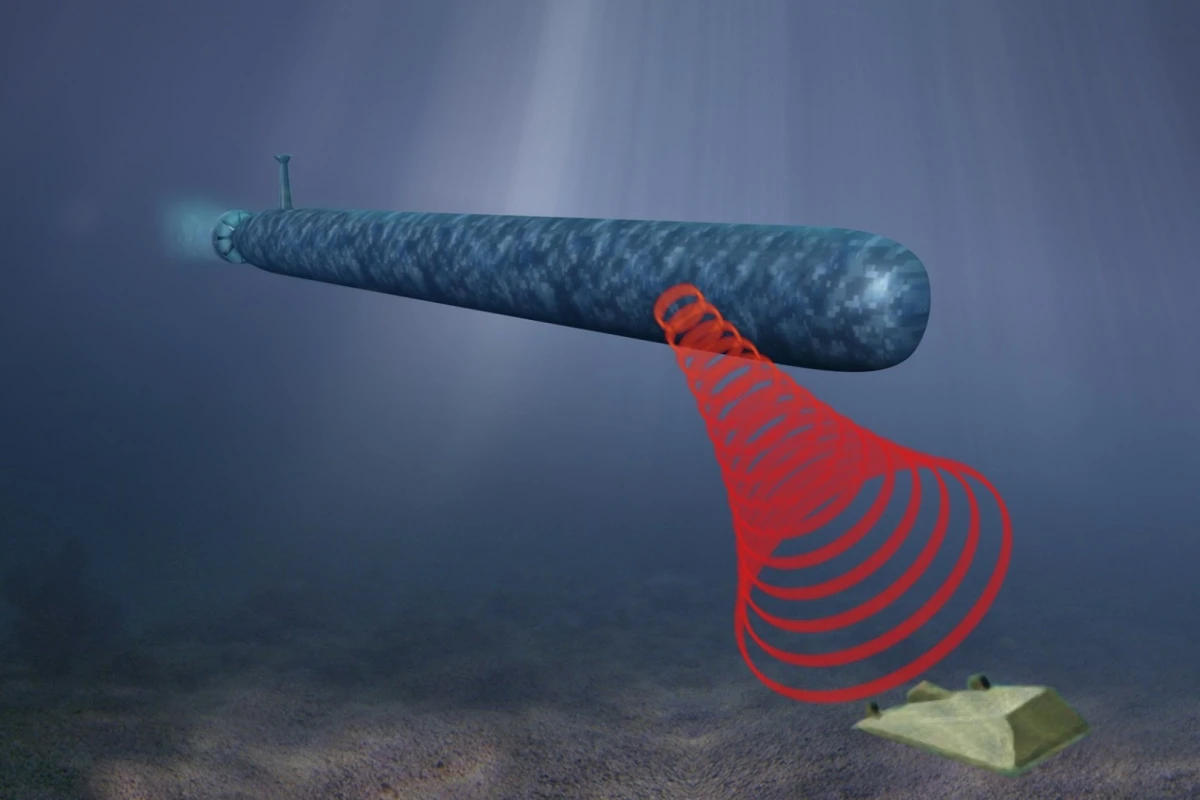

Underwater mine-hunting is one job you don't mind a robot taking away from you, which is why General Dynamics Mission Systems in developing the Knifefish robotic mine-hunter. The unmanned undersea vehicle (UUV) recently completed evaluation tests with the US Navy in a dummy minefield off the coast of Boston, Massachusetts, demonstrating its ability to detect and classify mines submerged at various depths.
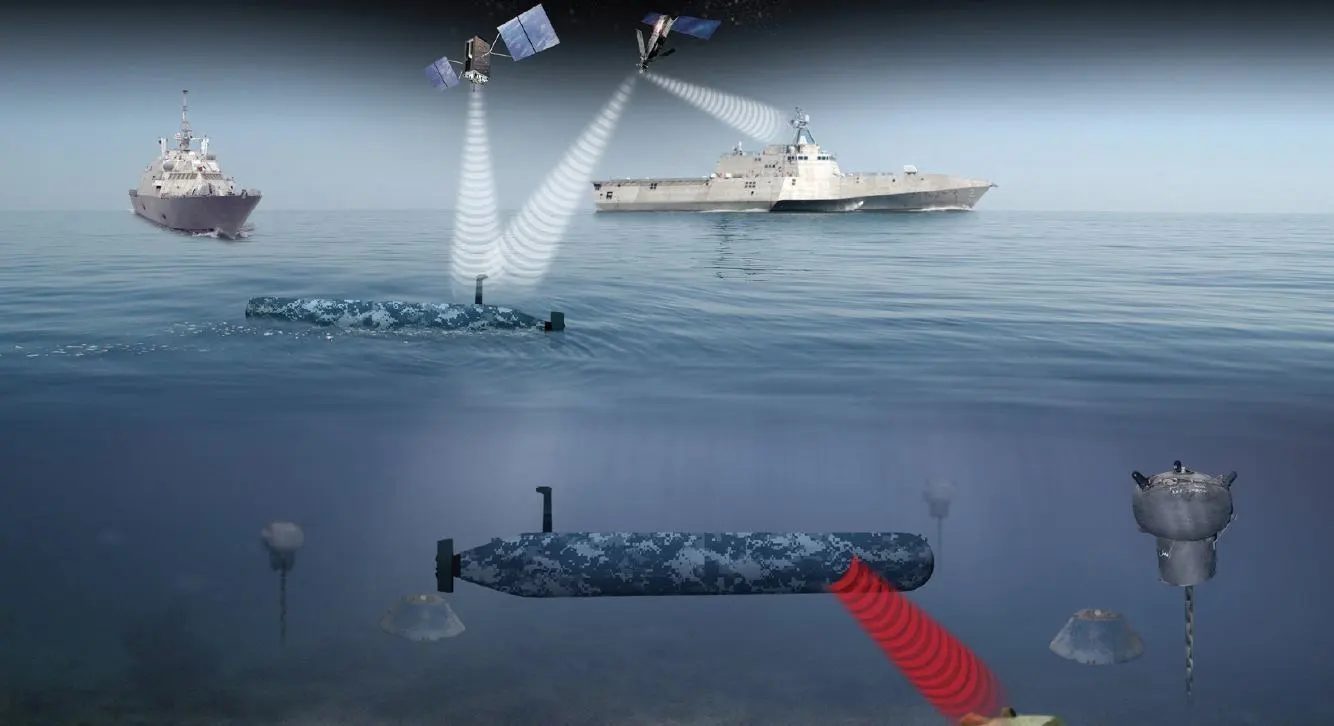
The Knifefish is a heavyweight-class autonomous Surface Mine CounterMeasure (SMCM) UUV and is based on the General Dynamics' Bluefin Robotics Bluefin-21 deep-water AUV. It is being developed for use by the US Navy's Littoral Combat Ship (LCS) as part of a Mine Countermeasure (MCM) mission package.
The sensor-laden robot is designed to seek out mines while its human supervisors and command ship remain at a safe distance. It can detect, identify, and classify mines, even in cluttered environments, and boasts an open-ended architecture and "plug and play" modular platform designed to allow it to be easily upgraded or quickly modified for various missions. Knifefish is also designed to pass on information to and operate with other mine warfare systems.

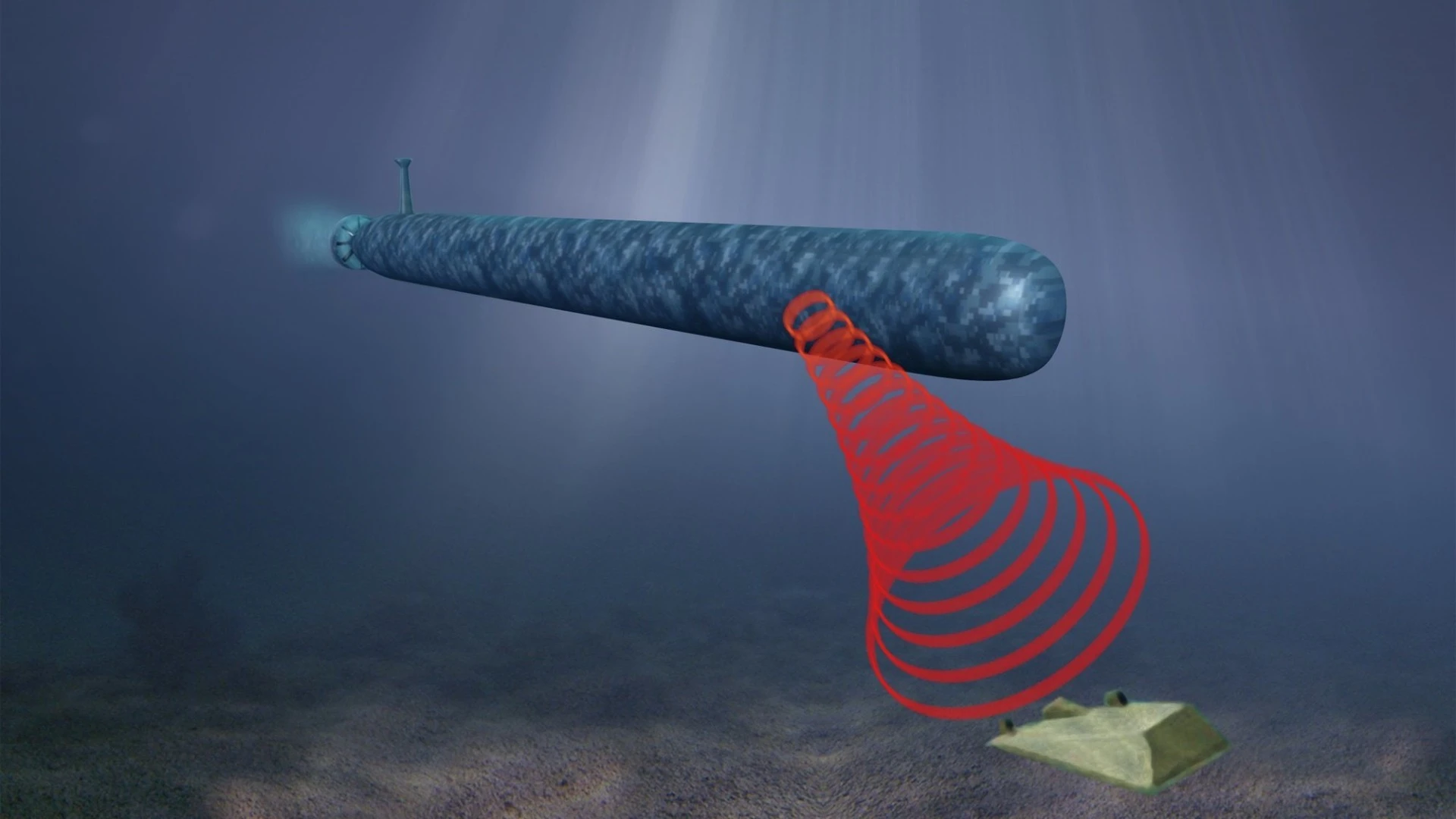
In the recent tests, the Knifefish proved successful in locating and classifying dummy mines submerged at various depths and also sitting on the seafloor. It's also designed to locate and identify mines buried under the seafloor. With the tests being hailed a success, further at-sea testing will be conducted this year ahead of anticipated formal System Acceptance Testing with the US Navy.
"The Navy continues to work with its industry partner, General Dynamics Mission Systems, to develop, test, and deliver the needed Knifefish capability to the fleet," says Captain Jon Rucker, Program Manager for the Navy's Unmanned Maritime Systems Program Office. "The system performed well against a variety of surrogate targets and we are confident we will refine its performance to support the planned schedule in 2017."
Source: General DynamicsUnderwater mine-hunting is one job you don't mind a robot taking away from you, which is why General Dynamics Mission Systems in developing the Knifefish robotic mine-hunter. The unmanned undersea vehicle (UUV) recently completed evaluation tests with the US Navy in a dummy minefield off the coast of Boston, Massachusetts, demonstrating its ability to detect and classify mines submerged at various depths.
The Knifefish is a heavyweight-class autonomous Surface Mine CounterMeasure (SMCM) UUV and is based on the General Dynamics' Bluefin Robotics Bluefin-21 deep-water AUV. It is being developed for use by the US Navy's Littoral Combat Ship (LCS) as part of a Mine Countermeasure (MCM) mission package.
The sensor-laden robot is designed to seek out mines while its human supervisors and command ship remain at a safe distance. It can detect, identify, and classify mines, even in cluttered environments, and boasts an open-ended architecture and "plug and play" modular platform designed to allow it to be easily upgraded or quickly modified for various missions. Knifefish is also designed to pass on information to and operate with other mine warfare systems.
In the recent tests, the Knifefish proved successful in locating and classifying dummy mines submerged at various depths and also sitting on the seafloor. It's also designed to locate and identify mines buried under the seafloor. With the tests being hailed a success, further at-sea testing will be conducted this year ahead of anticipated formal System Acceptance Testing with the US Navy.
"The Navy continues to work with its industry partner, General Dynamics Mission Systems, to develop, test, and deliver the needed Knifefish capability to the fleet," says Captain Jon Rucker, Program Manager for the Navy's Unmanned Maritime Systems Program Office. "The system performed well against a variety of surrogate targets and we are confident we will refine its performance to support the planned schedule in 2017."
Source: General Dynamics






