

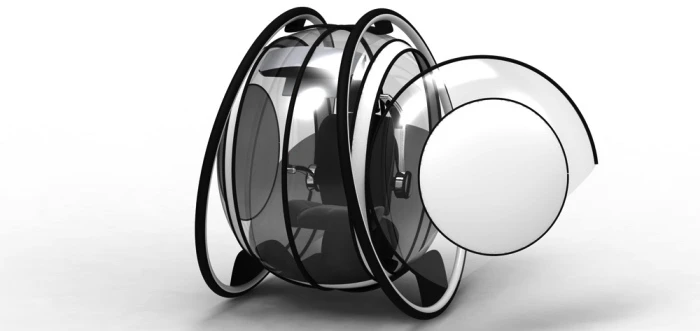





Very little is known about this "single person transport system" concept dreamed up by the enigmatically-named product design student Sanu K R from Ernakulam on India's west coast, but one thing is clear: it's a head-turner.
What's obvious is that the vehicle encases a lone passenger inside a transparent bubble, propelled by two wheels either side of the cockpit. The side-by-side arrangement of the wheels means the vehicle would need to be self-balancing, so perhaps its designer envisages fluid- and gyroscope-based sensors like those employed in Segways.
The vehicle seems to be controlled by a small joystick located on the right armrest (strongly reminiscent of electric wheelchair controls), while there appears to be a large, chrome brake lever to the left of the driver's seat. At least one side of the vehicle opens up for access.
We've reached out to Sanu K R to tell us more about the concept. At this point it's unclear to what extent this is a visual portfolio piece, or whether the designer has specific technologies in mind that could, theoretically at least, turn the SPTS (hey, why not?) into a reality.
Source: Sanu K R portfolio, via Yanko Design
Update, April 13 2012: Sanu K R got back to us with a few morsels of information about the design. Make of them what you will. We're told the transportation system relies on the principle of the inverted pendulum. "Gyroscopic sensors and fluid-based leveling sensors are used to detect the shift of weight and the balance of this system, [and] the change in its center of mass," Sanu K R told us.
This is used to establish and maintain a forward or backward velocity. "This transportation system has powered by two electric motors. "It balances with the help of a processing unit, tilt sensors, and gyroscopic sensors," he added. "The servo drive motors rotate the wheels forwards or backwards as needed for balance or propulsion."
Sanu K R additionally confirmed that steering of the vehicle is by means of a joystick. So there you have it.





