


Building a robot, it's probably safe to assume, is a daunting project. It would doubtless be considerably easier if designers didn't have to build everything from scratch, but could instead use pre-built modules. That's where the iMobot comes into play. Designed by University of California, Davis alumnus Graham Ryland and professor of mechanical and aerospace engineering Harry Cheng, the modular iMobot is a small robot in its own right, but could also be used as part of a larger robotic system.
Ryland and Cheng first began work on the iMobot when Ryland was studying for his master's degree in mechanical engineering in Cheng's Integration Engineering Laboratory.
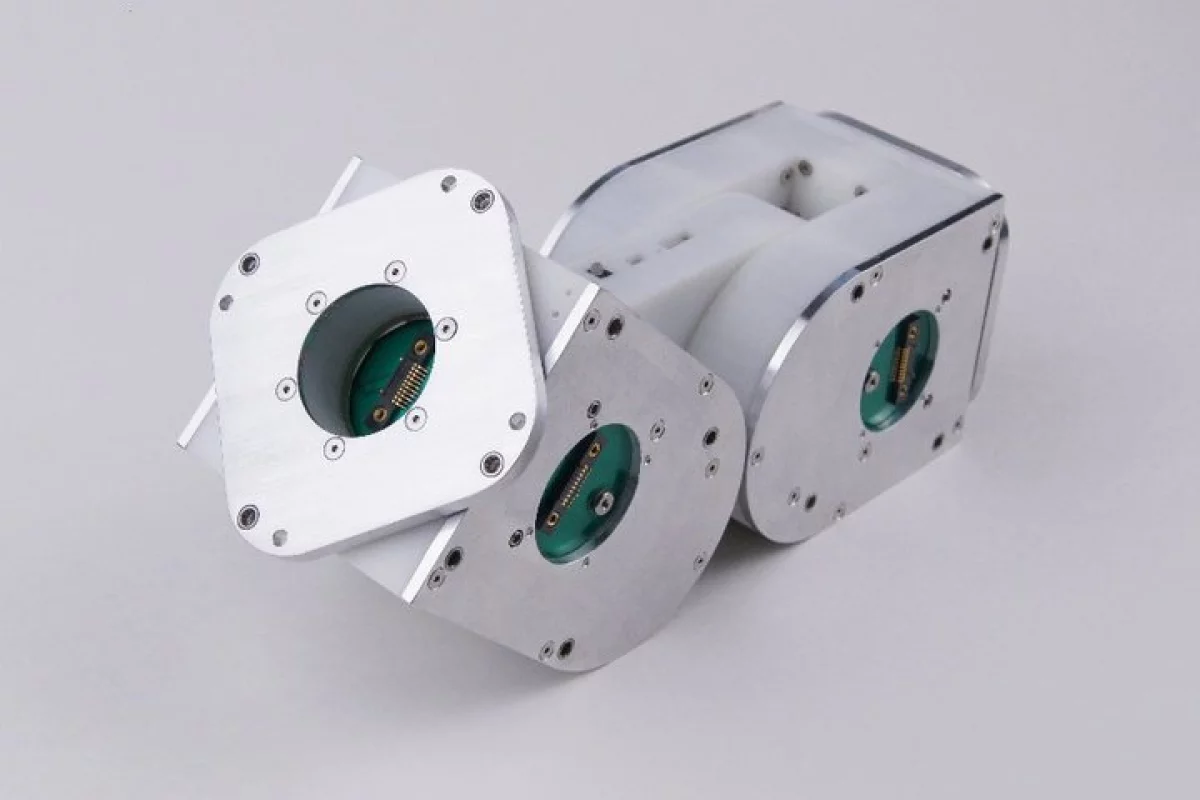
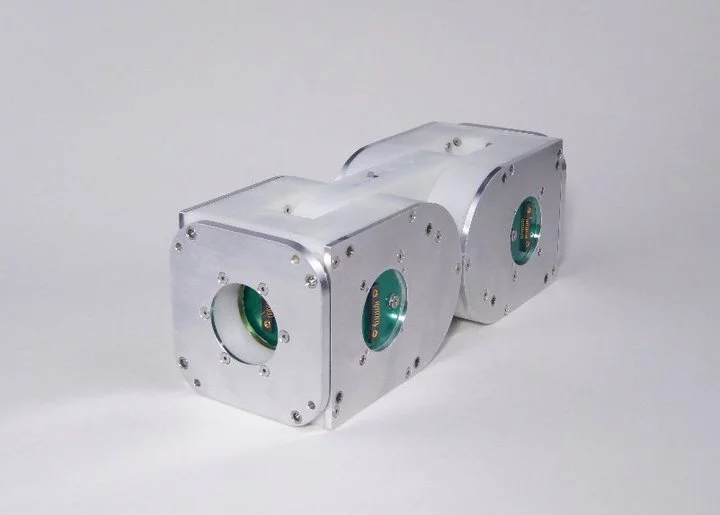
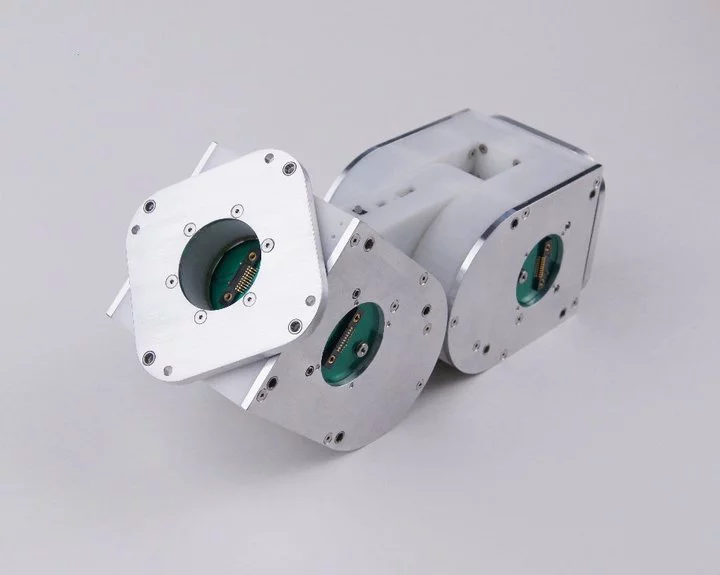
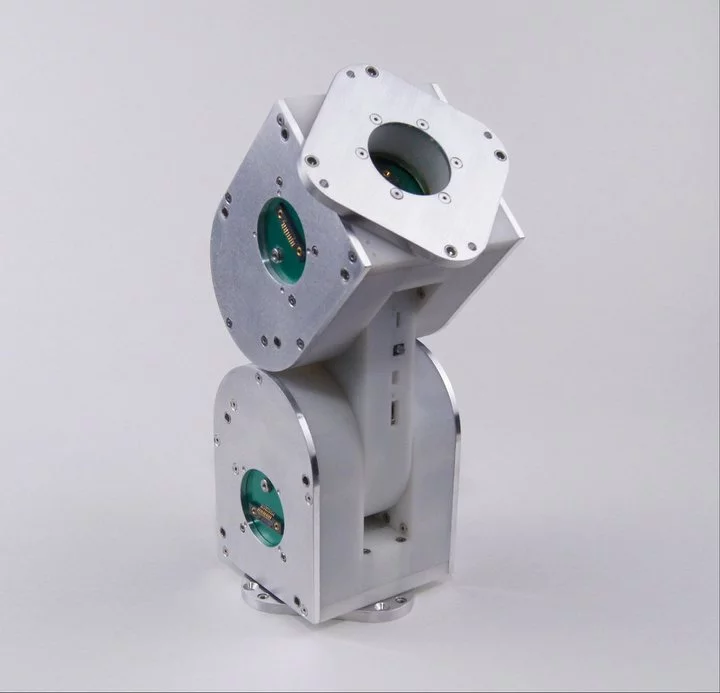
Each intelligent module/robot has four controllable degrees of freedom, with two joints in the center section and one wheel at either end of its body. They can move along the ground on their two wheels, in either a flat or arched stance, crawl forward and backward like an inchworm, or squirm sideways. They can also serve as a camera platform, by standing up on one end, and swiveling their top section around.
It is envisioned that multiple modules could possibly be joined together into a snakelike train, for accessing confined spaces – not unlike the existing HyDRAS construction robot – or put together into a wheeled robot designed to travel on smooth surfaces. They could also be used as research tools, such as for engineers developing control systems for individual robots or swarms of robots.
"We wanted to create a robot that was modular and could be assembled together, but was also mobile and useful by itself," said Ryland. "We feel this hardware platform could drastically speed up university and industry research in the field of robotics."
It's somewhat reminiscent of Willow Garage's open source PR2 project, in which groups utilizing the multi-purpose PR2 robot share their developments in software and hardware with one another.
Ryland and Cheng are now working on commercializing the iMobot, through their UC Davis spin-off company, Barobo. They hope to have it on the market by the end of the year.





