


















The term mad scientist gets thrown around quite a bit, but in the case of one Matt Denton it most certainly applies. His company, Micromagic Systems, has been working steadily over the past four years to design and build a walking robot that's big enough to carry a human passenger. The resulting beast is described as "the biggest, all-terrain operational hexapod robot in the world."
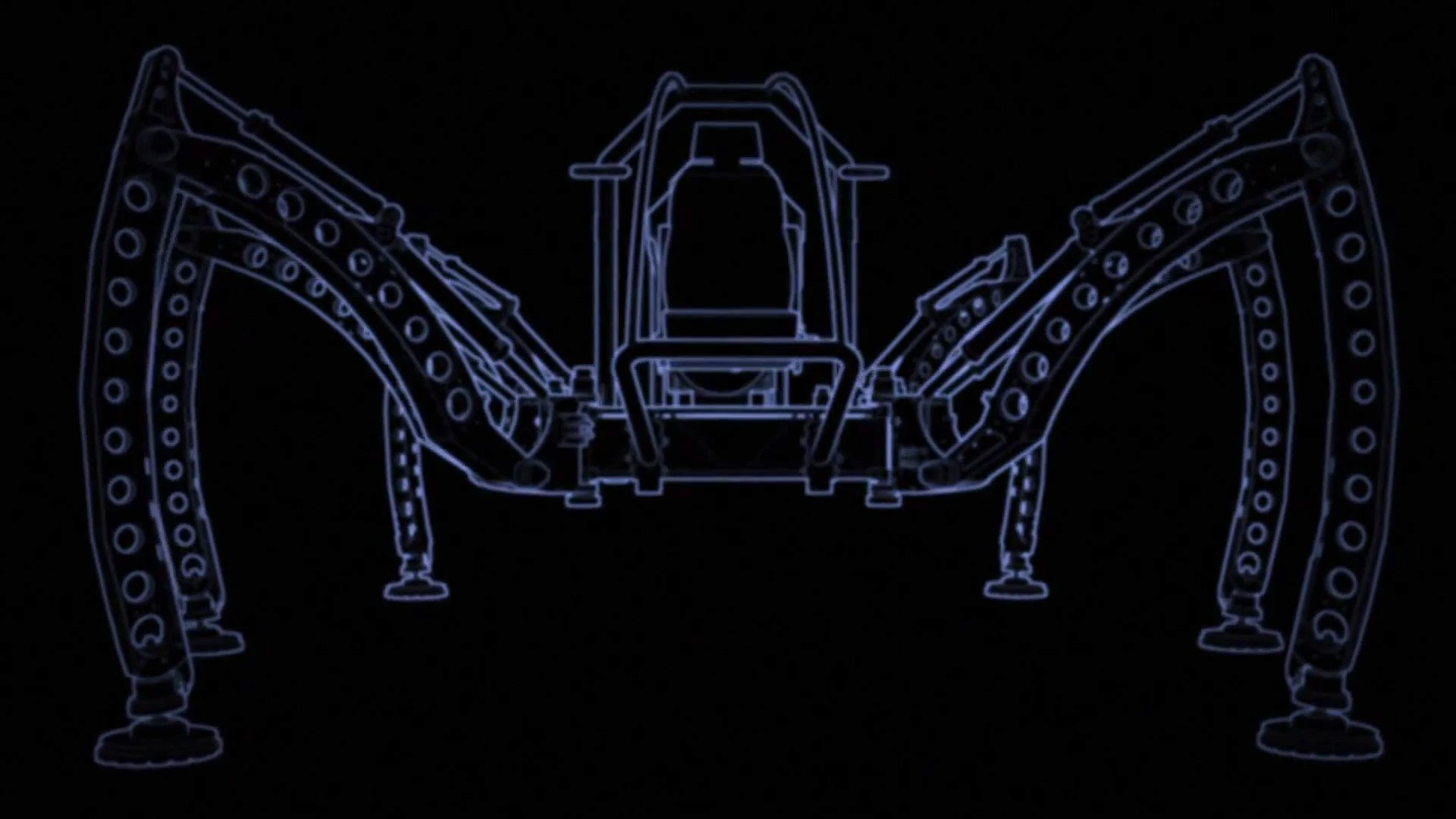
The robot weighs a massive 1,900 kg (4,188 pounds), stands 2.8 meters (9.18 ft) tall, and is powered by a Perkins 2.2 liter turbo diesel engine and hydraulics. It's outfitted with a variety of sensors (including force transducers, angle sensors, and an inclinometer) that help it walk. A Linux PC running HexEngine – software designed to control hexapod locomotion – takes care of the 18 hydraulic actuators in its legs, while a panel PC puts you in the driver's seat.
"This is definitely the largest hexapod we have built so far," says Micromagic founder and Mantis' chief designer Matt Denton. His company, which produces animatronics for the film and television industry, has worked on hexapods before – including one that appeared as a six-legged turtle in the Harry Potter films. Mantis, however, was a passion project that is now being rented for events.

This isn't the only ginormous hexapod robot being built. A team from Massachusetts is working on one of a similar size called Stompy, following a successful Kickstarter campaign last year. However, Matt and his team beat them to the punch with Mantis, which you can see in action in the video below.
Source: Mantis Robot, Mantis Facebook page





