
From leaping over obstacles to pulling objects thousands of times their own weight, robots are great at many things. What they're not so good at is working as an autonomous team in an unfamiliar setting – until now, that is. A team of researchers from MIT has developed an algorithm that streamlines the way robots collaborate on construction tasks, significantly cutting down planning time.
The problem with the way that robots usually tackle construction tasks, is their insistence on getting it right the first time. Existing algorithms dictate that the machines have to complete tasks in a single step without dropping components. This leads to a lot of wasted time while the optimum spot to grip components is calculated, and with more complex tasks, a no-drop solution is sometimes impossible.
The new algorithm is designed to deal with a situation where the robots in question must perform an assembly operation that requires multiple steps, some of which require two of the robots to work together to complete. None of the robots are given specific tasks, with the decisions as to which machine does what being made on the fly.
The MIT team's algorithm takes a different approach to existing methods, deferring difficult grip-related decisions until the easier parts of the task are complete. It starts by completely ignoring the grasping problem, devising a plan that would see the robots pick up and subsequently drop everything after every assembly stage.
It then looks at each robot's task at hand to determine whether there's an obvious grasping solution that won't interfere with what the other machines are up to. If there isn't one, it'll stick with the pick-up-and-drop plan. Once all the easy gripping decisions have been made, the algorithm returns to postponed decisions.
This method leads to the robots putting down components and picking them up again to complete the next stage of the process, but that takes far less time than that required to compute a single-step solution.
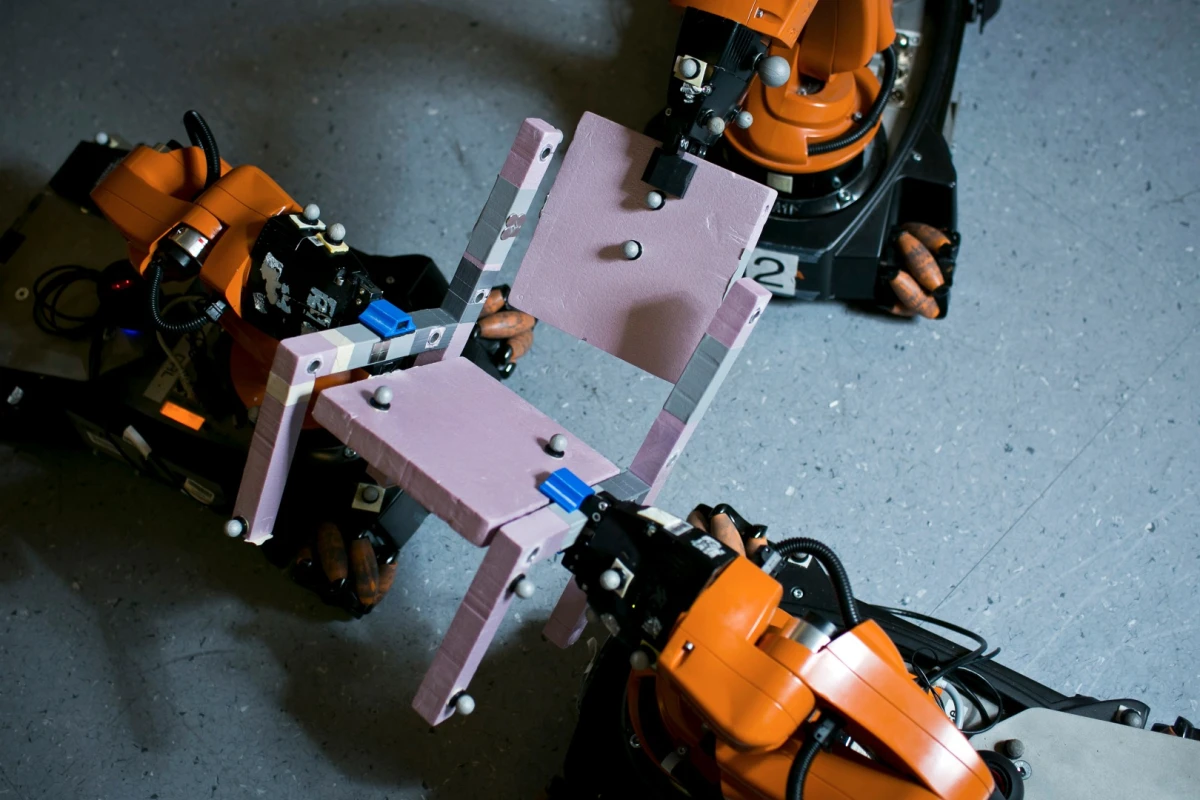
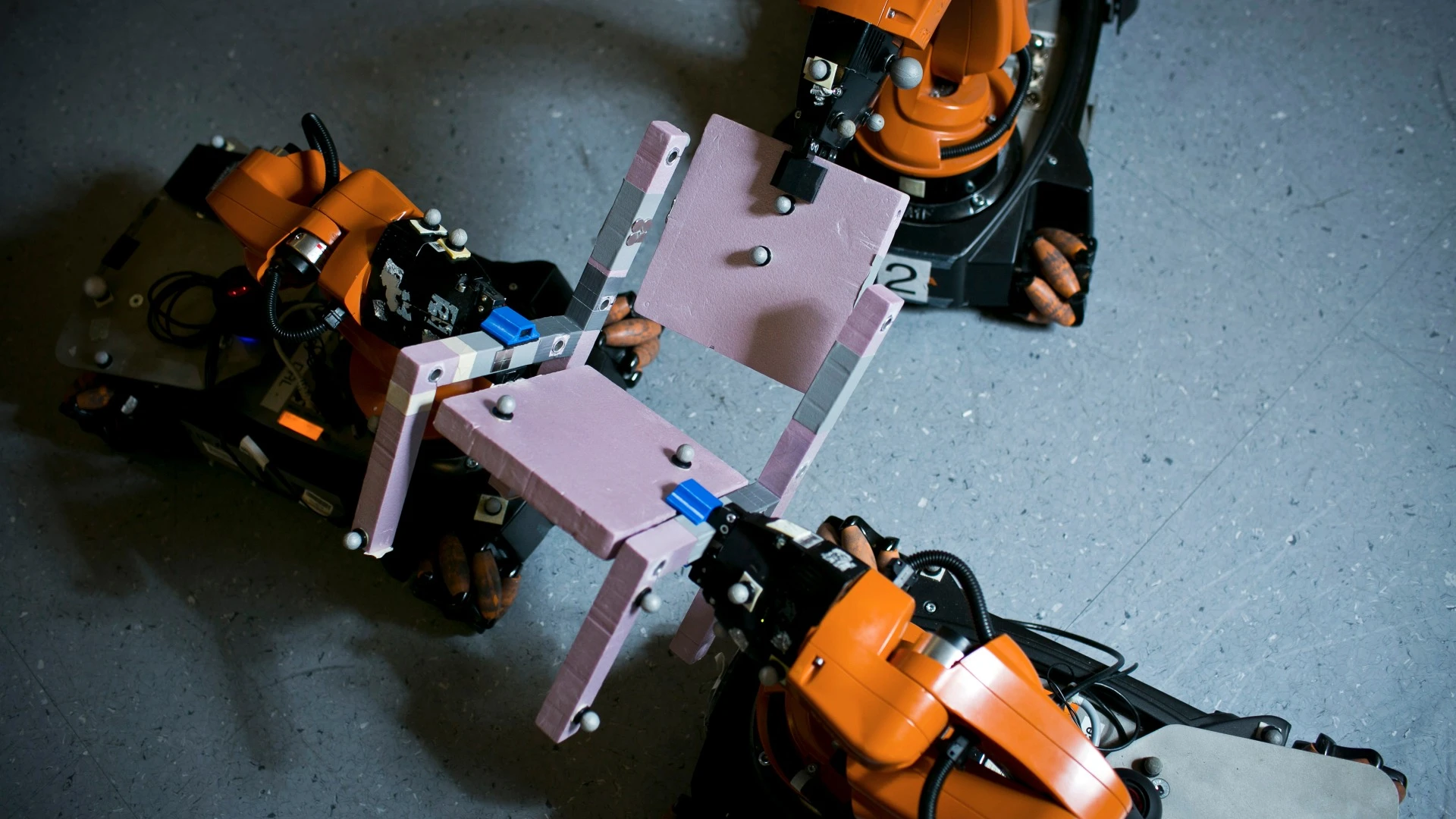
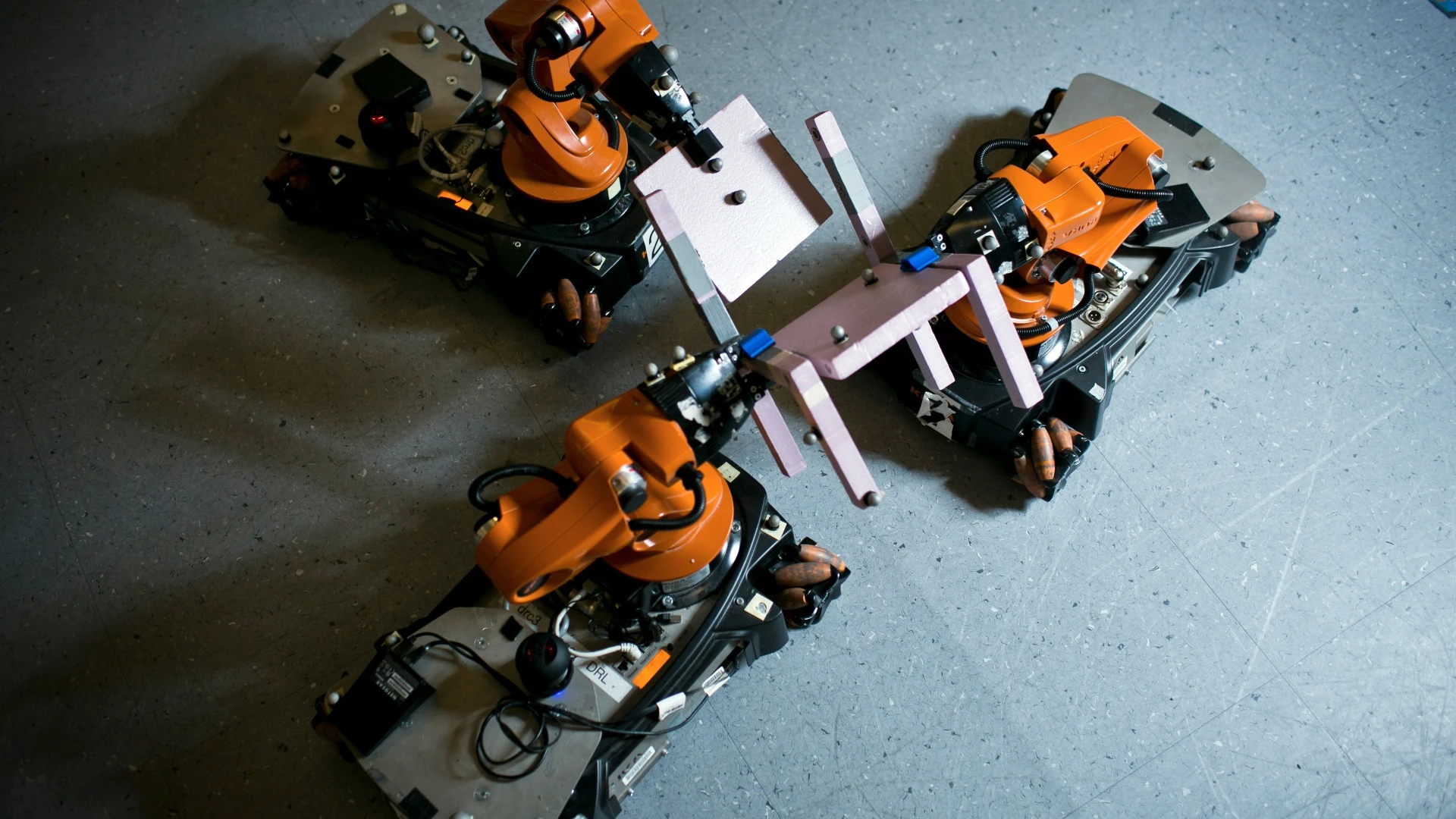
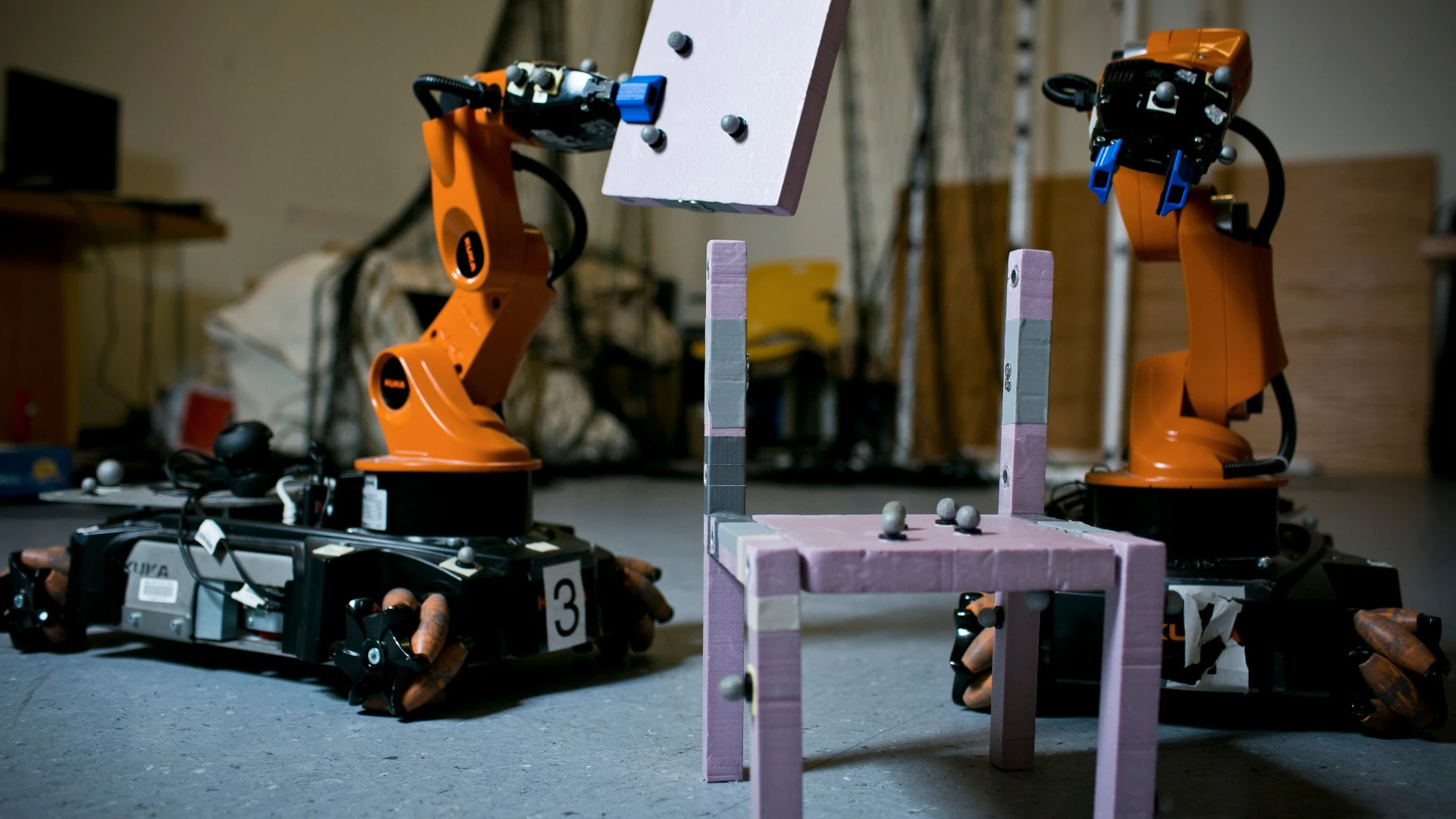
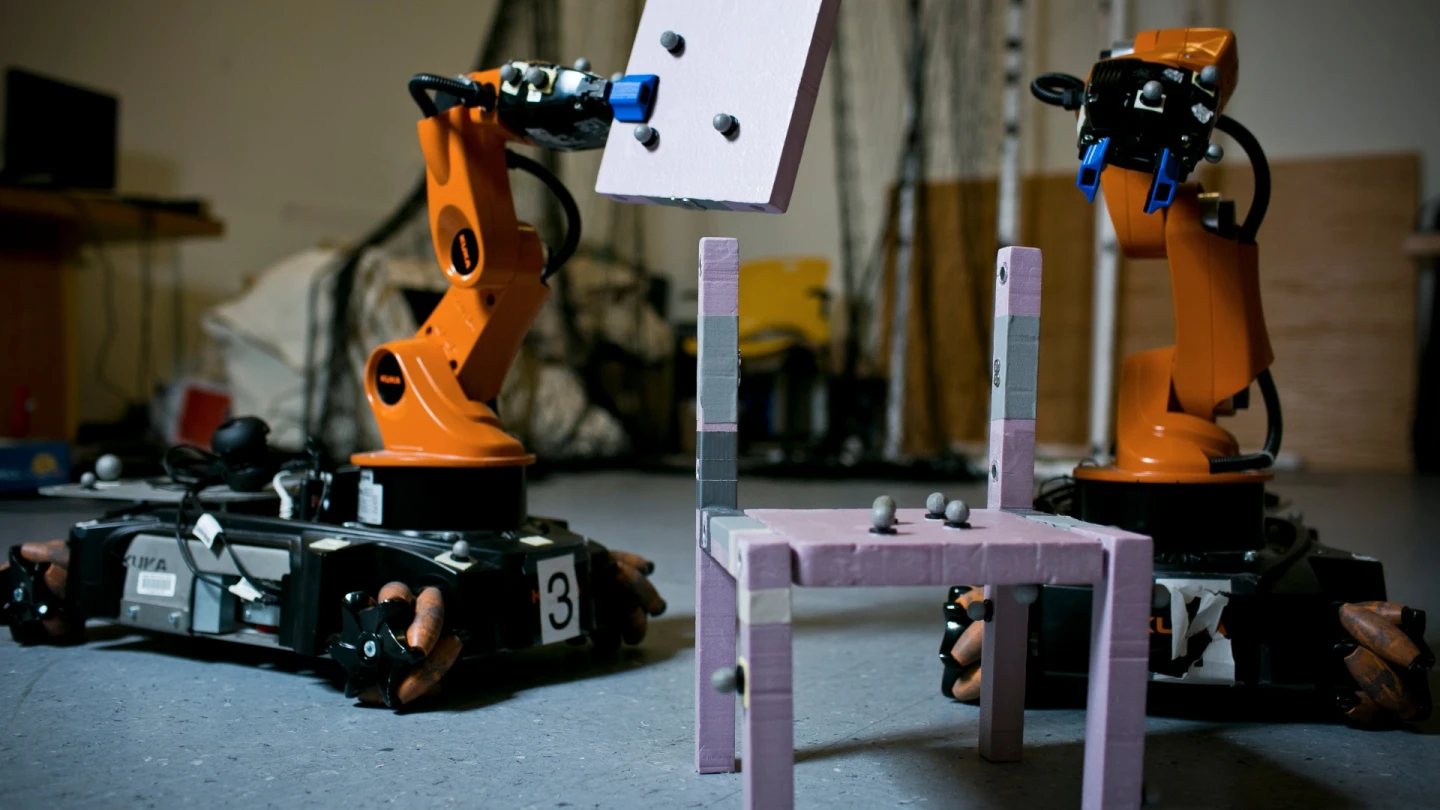
The team tested its new method, using it to guide three robots in the assembly of a chair, with positive results. The team also ran numerous simulations of more complex assembly operations, finding that the new algorithm led to completion of a task in just a few minutes, where a no-drop solution took hours to compute.
Overall, the new algorithm looks like a big positive step towards an efficient robotic workforce.
"We’re really excited about the idea of using robots in more extensive ways in manufacturing," says Daniela Rus of MIT’s Department of Electrical Engineering and Computer Science. "For this, we need robots that can figure things out for themselves more than current robots do. We see this algorithm as a step in that direction."
The team's efforts were recently nominated for two best-paper awards at the Institute for Electrical and Electronics Engineers’ International Conference on Robotics and Automation.
You can check out the video below to see the algorithm in action.
Source: MIT





