




June 30, 2006 Each year the place to be for anyone in computer graphics, animation and virtual reality is the SIGGRAPH conference which will be held in Boston (July 30-August 3) this year and some of the incredible exhibits planned are just beginning to come to light. One that really captures our imagination is this set of powered shoes developed by Hiroshi Tomioka and Hiroaki Yano at the University of Tsukuba in Japan. The University of Tsukuba is a hotbed of research with a lot of development of virtual reality interfaces underway. The Powered Shoes are just one of a number of projects designed to enable a person to realistically move through a virtual world without needing to move from the spot. Working like reverse roller-skates, the Powered Shoes effectively cancel the horizontal displacement of the user as they are driven from electrical motors in a backpack worn by the user, enabling omni-directional walking while maintaining the wearer's position. As such, the powered shoes are an important advancement in the world of entertainment and simulation and are the only viable alternative we have seen capable of emulating the capabilities of the landmark Virtusphere,
Recognising that the proprioceptive feedback of walking is not available to the user in most virtual environments, the Powered Shoes were developed so that the wheels on the roller-skate-like devices roll backwards to cancelsthe displacement of the walker.
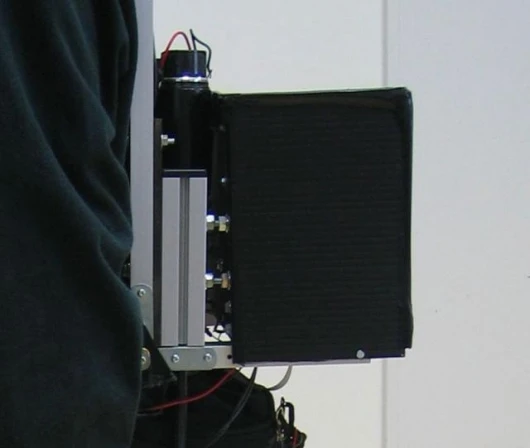
Existing locomotion interfaces employ motion floors to create the feel of traversing infinite distances in a virtual environment. Powered Shoes employs active roller skates instead of a motion floor. The skates have three rollers, two of which are connected by a timing belt and driven by a motor. The diameter of each roller is 16mm, the overall height of the mechanism is 20mm, and the overall weight is 700g (the same as hiking shoes). The mechanism allows the user to walk at a pace of 60cm/s.
More information soon.
