



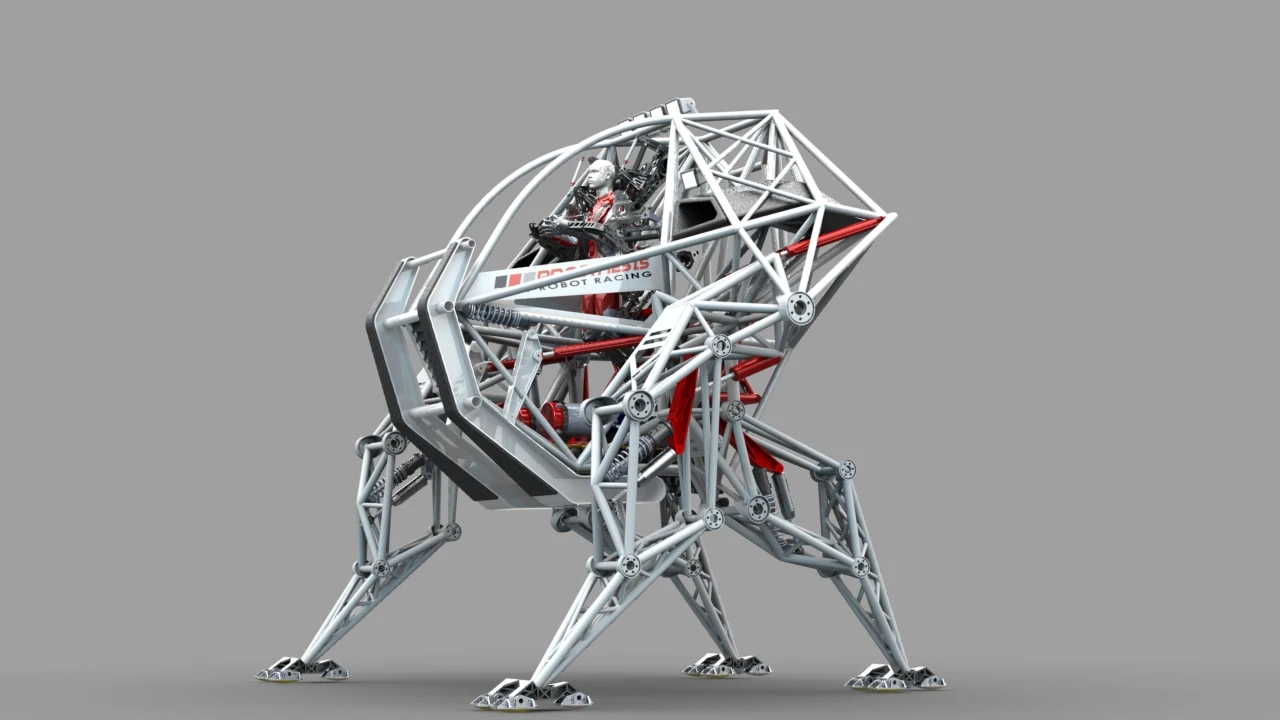















Who wouldn't want to slip into Iron Man's armor or try out the gigantic Jaegers that saved the world in the movie Pacific Rim? Wearable exoskeletons currently being built, from the military-based TALOS, XOS 2 and HULC to rehabilitative models like the ReWalk, MindWalker and X1, all have one thing in common; they are all robotic automated body suits designed to enhance or assist people. Is there a place for a skill-oriented, non-robotic walking exoskeleton, that a person would have to master physically by feel, much like how one might master riding a bicycle or using a skateboard? Jonathan Tippet thinks so. He and his team of volunteers are building Prosthesis, claimed to be the world's first human-piloted racing robot. It's a 5-meter (16-ft) tall behemoth that will rely entirely on the pilot's skill to balance itself or walk or run.
"I can't believe a human-piloted giant mech racing league has not happened yet," Tippett, a Vancouver-based artist and part-time biomedical engineer at Evasc Medical Systems, tells Gizmag. "We've raced every other type of moving technology we've ever made ... where are the racing robots?".
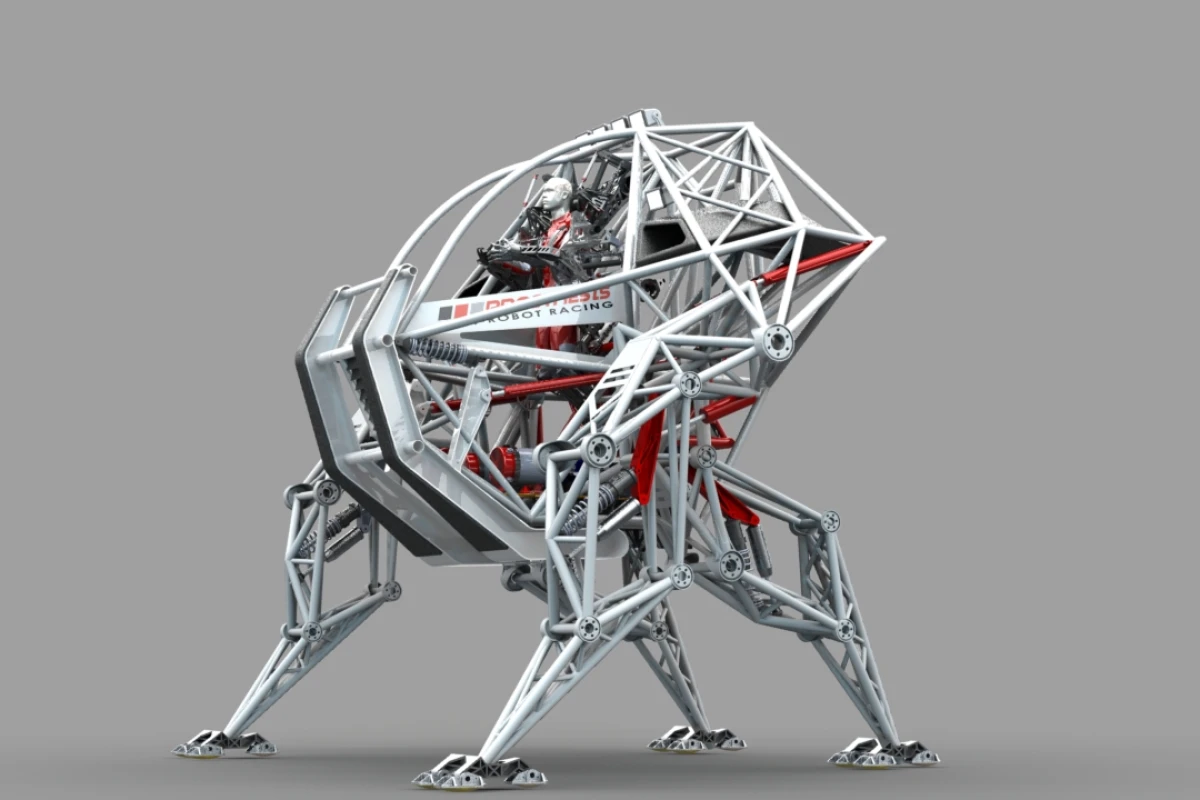
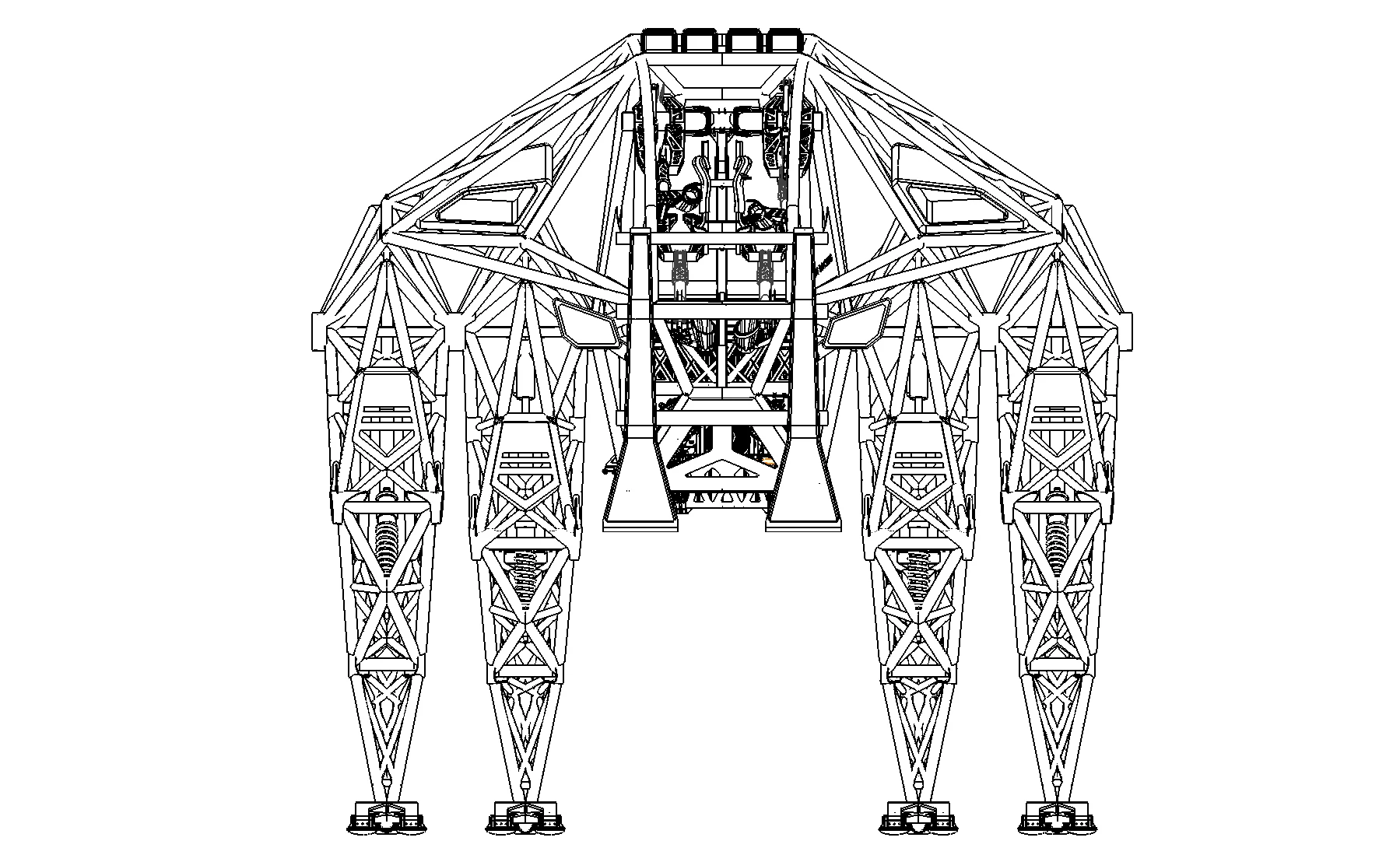
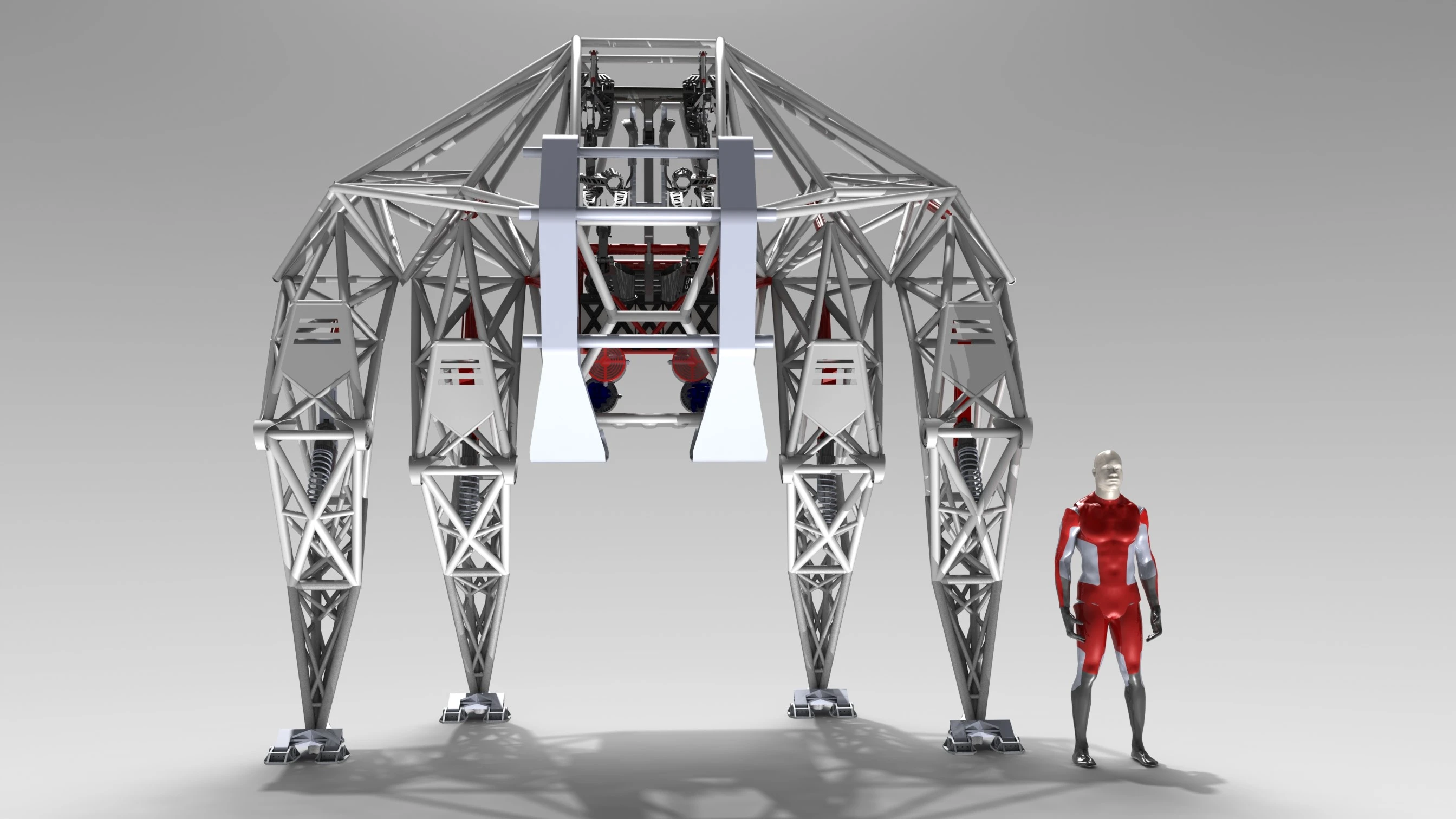
Describing it as a cross between a gorilla, a T-rex and an excavator, the aptly-named Anti-Robot, Prosthesis, is Tippett's idea of a wearable sports machine where the pilot acts as the athlete, controlling the machine by using their entire body. To do this, the pilot climbs into the 3,500-kg (7,700-lb) mechanical quadruped, using a retractable ladder built into its front.
Once strapped into the seat with a five-point harness, the pilot will be able to slide their arms and legs into a full body exo-skeletal interface. Gripping the controls with the hands will lock the pilot into the interface and activate the control system. The entire setup will leave the pilot free to move both arms and legs, enabling control of the machine and even becoming one with it, in a sense.
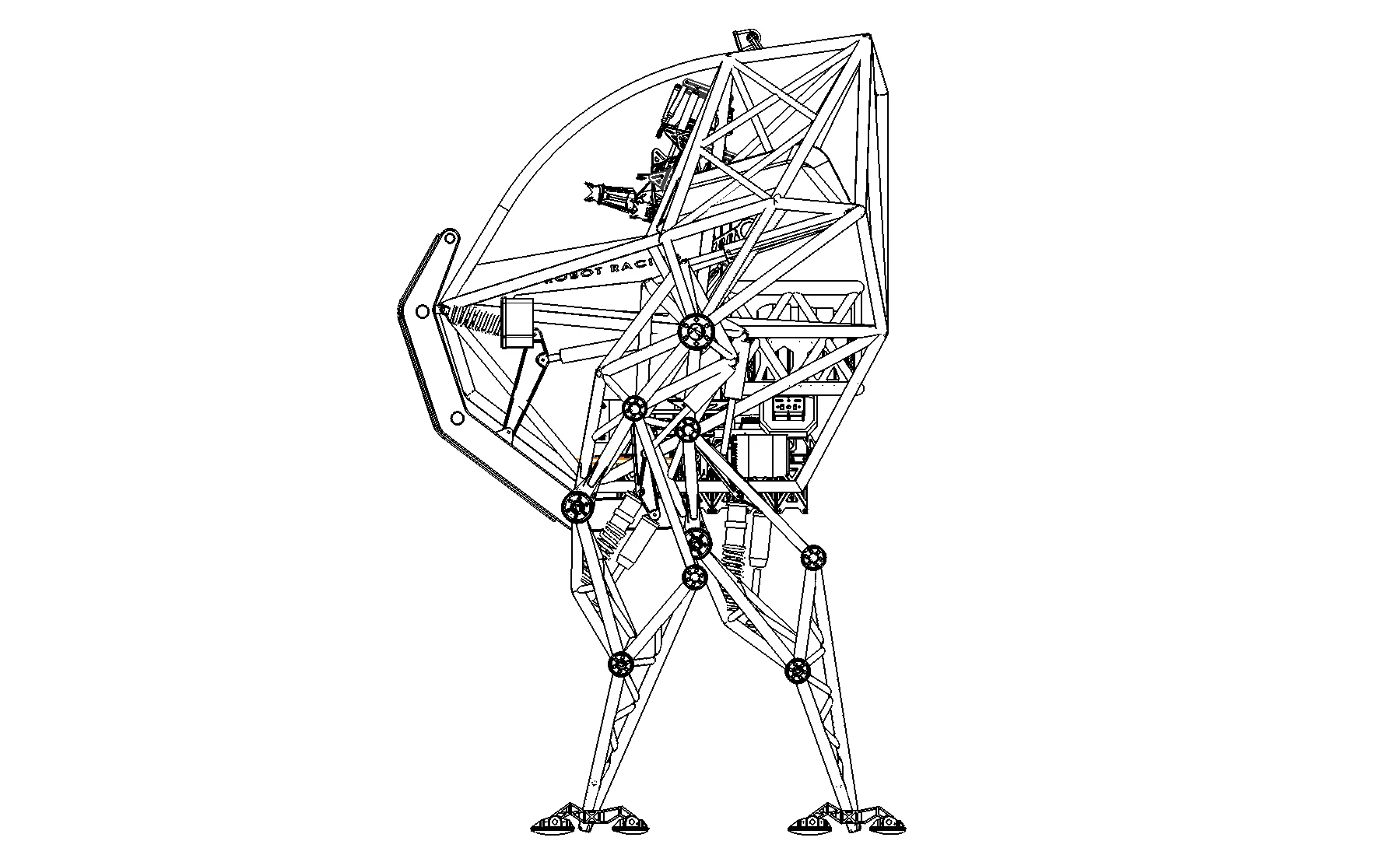
"Prosthesis will directly follow the movements of the pilot's limbs," explains Tippett. "Their arms control the outside legs and their legs control the inside legs. The machine will lope like a gorilla."

Each massive leg has two joints and can move either forward or backward. Controlling all of the eight joints spread out across its four legs will require the pilot to use their entire body. To make racing with Prosthesis as thrilling as possible, Tippett decided to have the machine physically interact with the pilot and vice versa. The special exo-skeletal interface, or exo-frame, will give pilots direct physical feedback on the machine's condition through its suspension systems, allowing them to operate it on an intuitive physical level.
"The force on each foot will be transmitted directly, mechanically to the pilot's arms and legs through the exo-frame for every step," Tippett tells us. "Not violently or ever in a way that could hurt the pilot, but the pilot will know by feel, just exactly how much weight is on each foot at all times."
The real-time, user-controlled suspension allows the pilot to instantly stiffen the suspension of each leg independently. For instance, if the machine is leaning too far in one direction, the pilot can simply stiffen that side. With practice, they can even anticipate when one leg needs to be stiffer and adjust things before the impact even occurs, kind of like bracing for a big step at the end of a flight of stairs.
The position of the machine's four limbs will mirror the pilot's four limbs and the machine will amplify the pilot's movements by 60 to 100 times their original force. In time, pilots won't need to think about where the machine's legs are, they will just feel it, much like how one doesn't need to look at the wheels when they ride a bike. Tippett says that this is essential, since the pilot won't have a clear view of the machine's legs most of the time and will need to be much more focused on what they are about to step on next.
Gaining the skills to ace moving or racing with Prosthesis will depend on how well the pilot masters the innovative air spring mechanism built into the hand grips, that controls valves in the suspension system. Each of the four triggers at the pilot's fingertips corresponds to one of the four legs. Pilots will be able to optimize the machine's walking efficiency on-the-fly and fine-tune its performance by changing the suspension response of every leg.
"The trigger can be pulled just before impact to prepare for a big hit, half-way through to adapt to an impact mid-way, or at the end, to store impact energy and return it when you need it, like when the legs are behind you," explains Tippett. "The timing of these triggers will be like playing an instrument and will allow the pilot to subtly adapt the machine's response to terrain with every step."

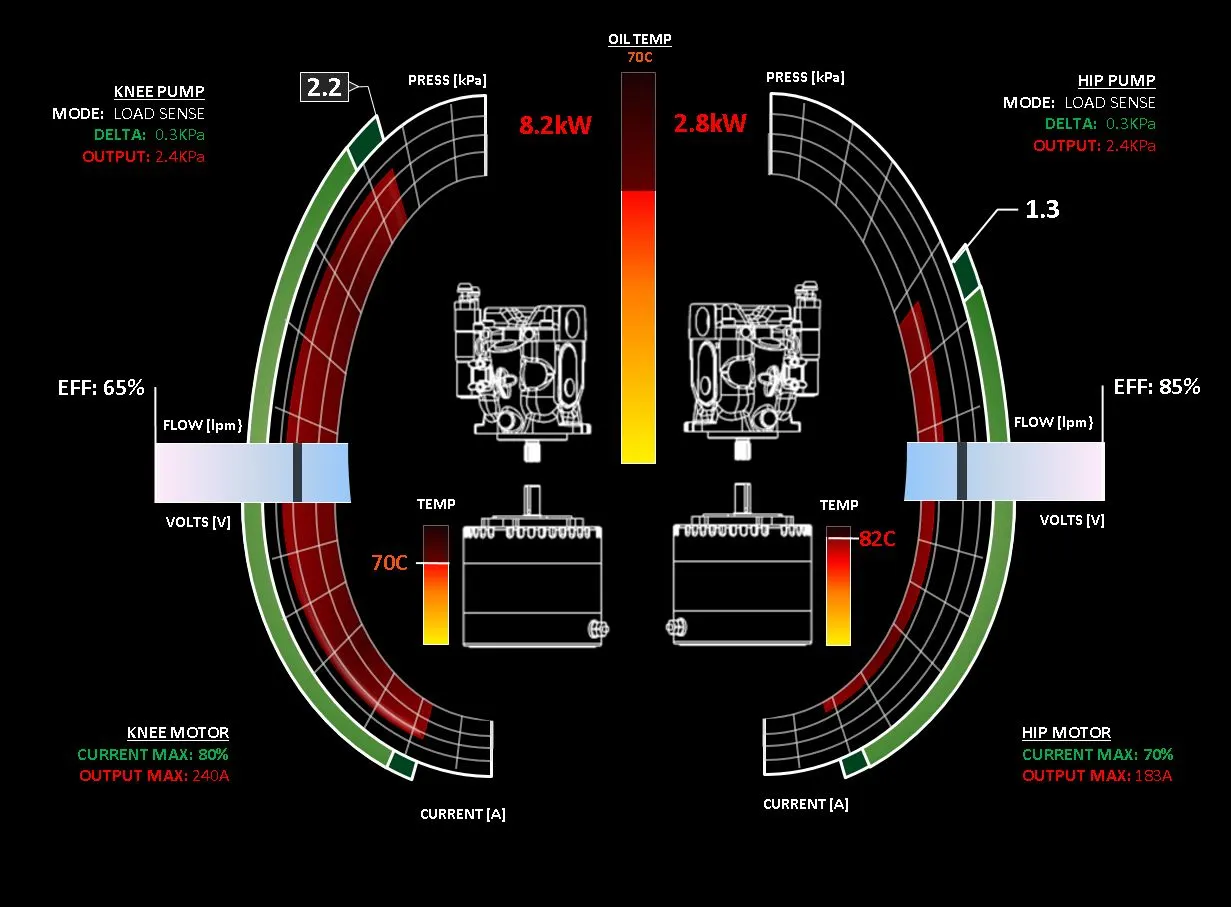
To accelerate pilot learning, Tippett plans to map the machine's activity to audio and visual outputs, providing the pilot with enhanced sensory feedback. Multiple sensors will detect pressure, temperature, voltage, current and other critical data that will be translated into sounds and light patterns for the pilot to hear and see. Pilots will hear harmonious sounds when the machine is being operated well, and dissonant ones when it is being overloaded; the visible lights will reflect how hard its parts are working.
According to Tippett, simply listening to the soundtrack of a skilled pilot will help new pilots to understand how to operate the machine, without needing in-depth knowledge of how it works. Should they want to know more, a head-up display will give the pilot detailed technical information, which can also be ported to any network-enabled device; a person can interact with it through a custom-made touchscreen-based graphical user interface.
When developed, Prosthesis will race at a top speed of 30 km/h (19 mph), which is about how fast an average person can sprint, says its designer. Power is provided by a custom-engineered, 100 percent electric power plant that uses lithium-ion batteries to supply up to 230 kW (300 hp) to the hydraulic pumps.
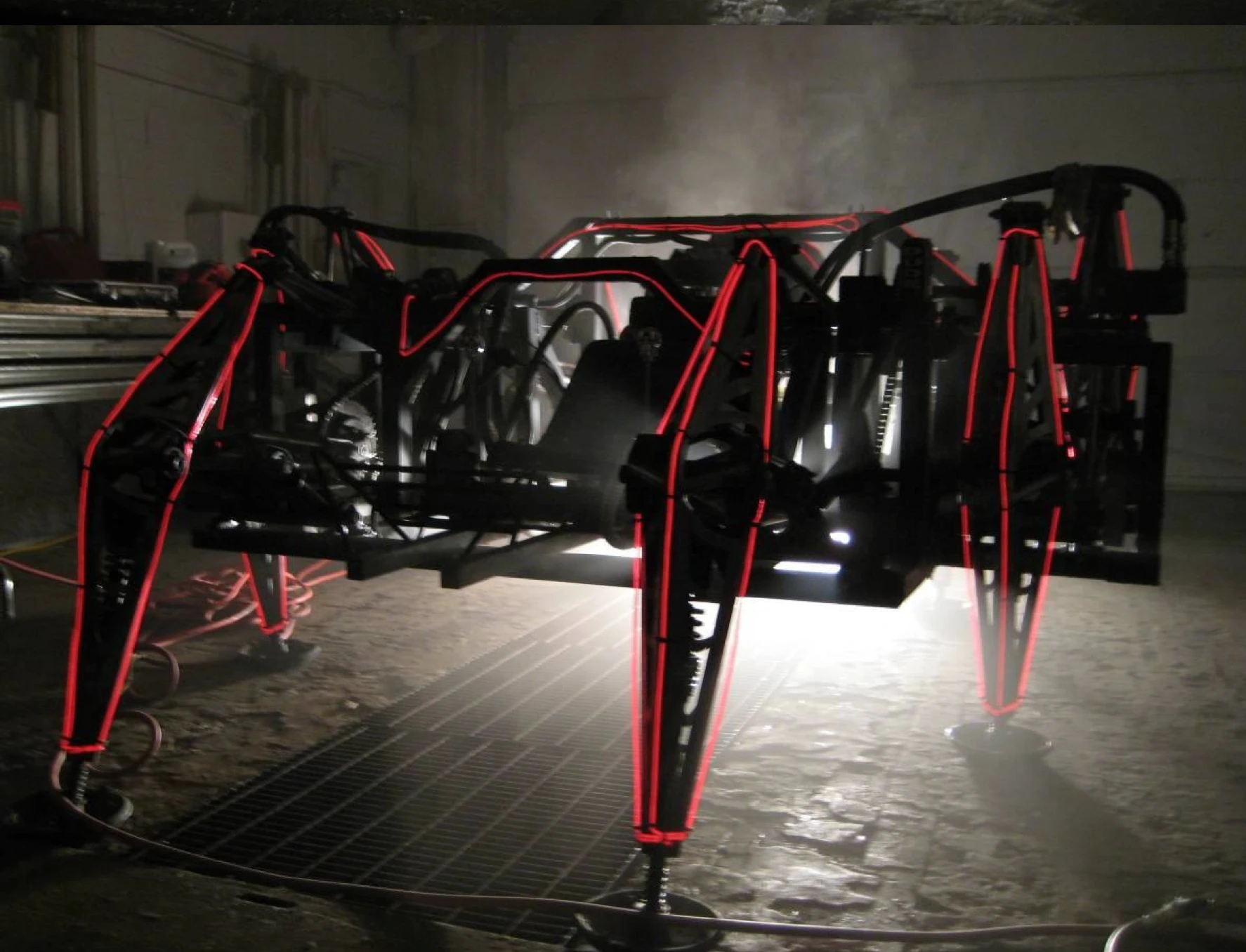
Prosthesis isn't Tippett's first wearable "mech suit." An earlier collaborative project resulted in the Mondo Spider – a giant, electric-powered, eight-legged mechanical spider, operated by a human pilot, that's being exhibited at schools, fairs and trade shows to get people interested in the technology.
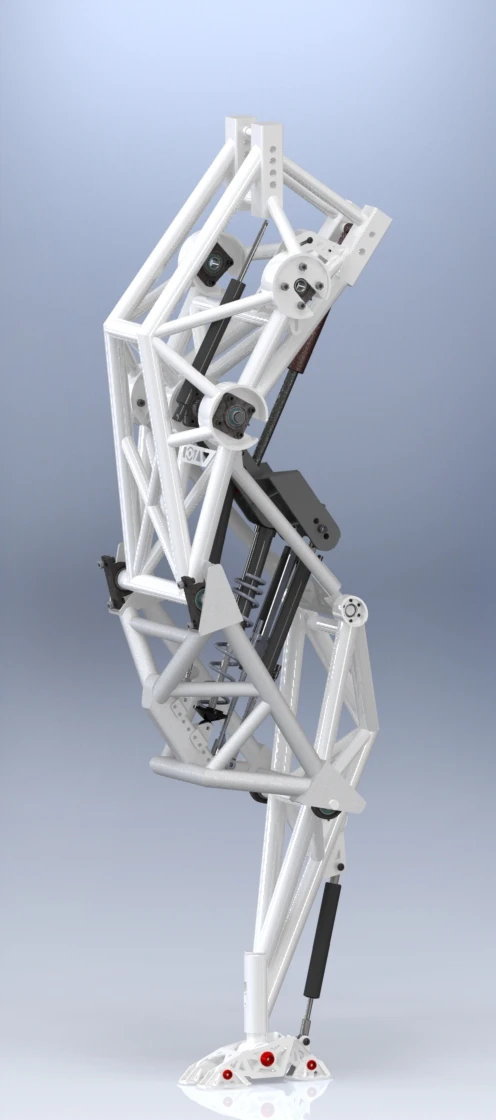
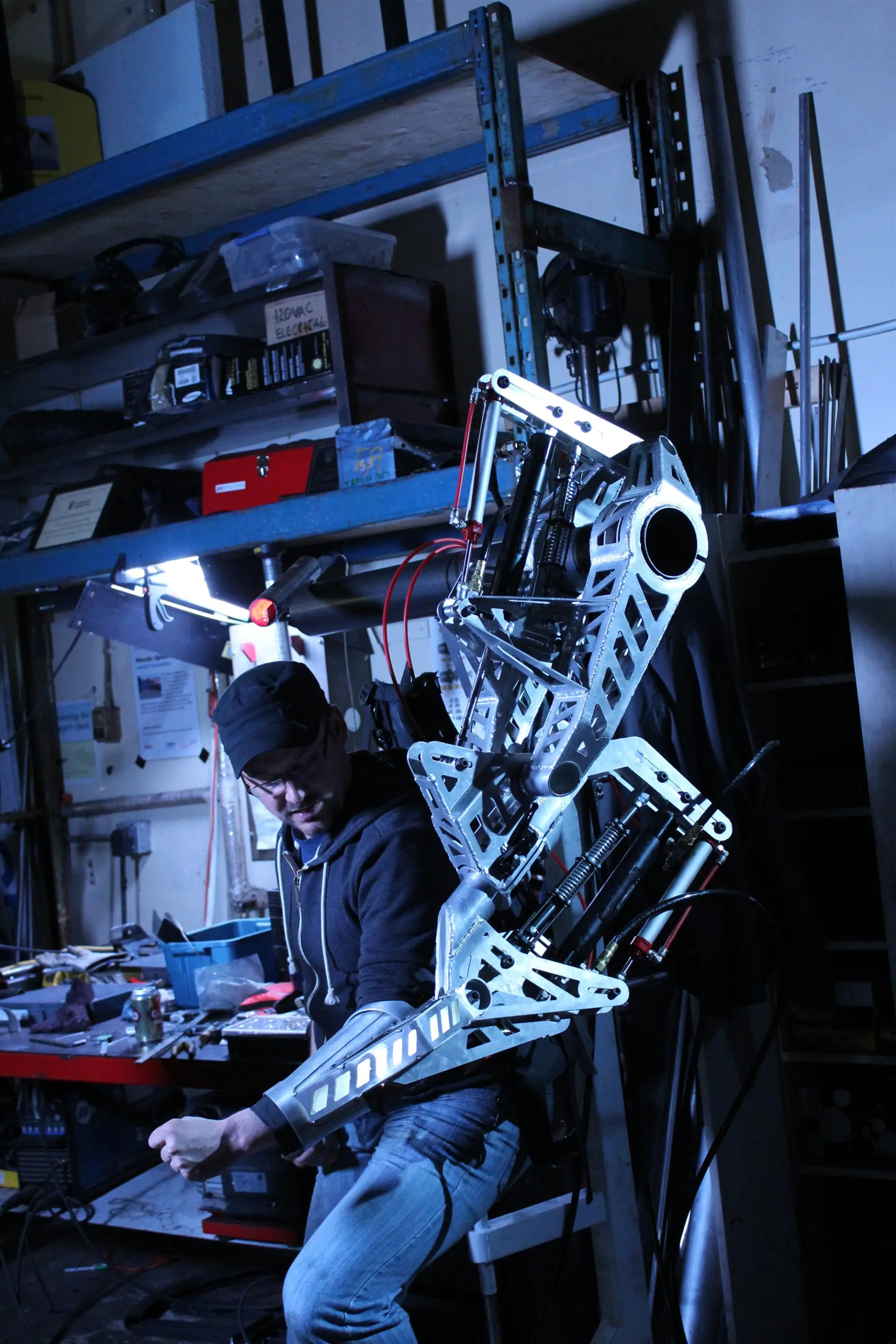
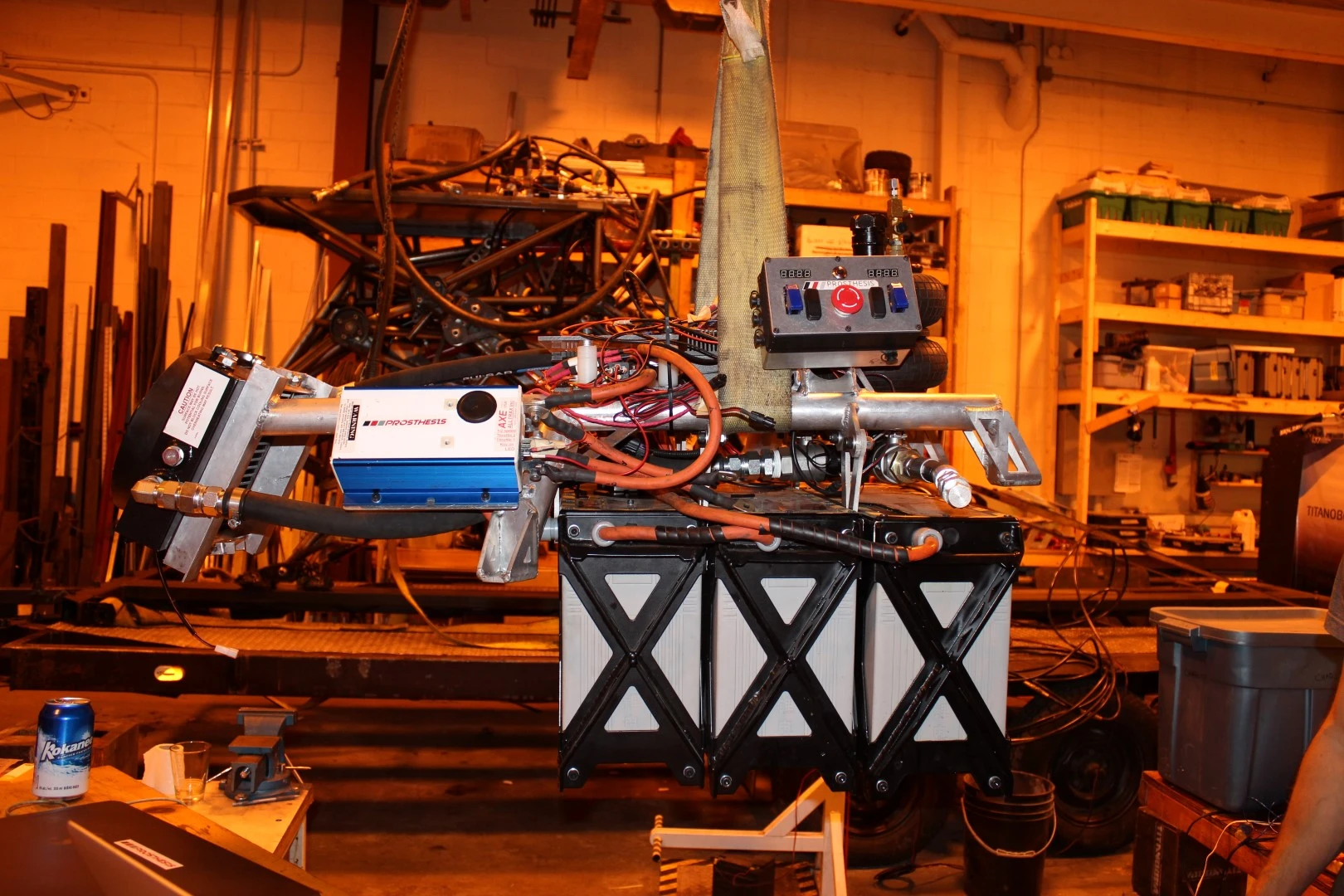
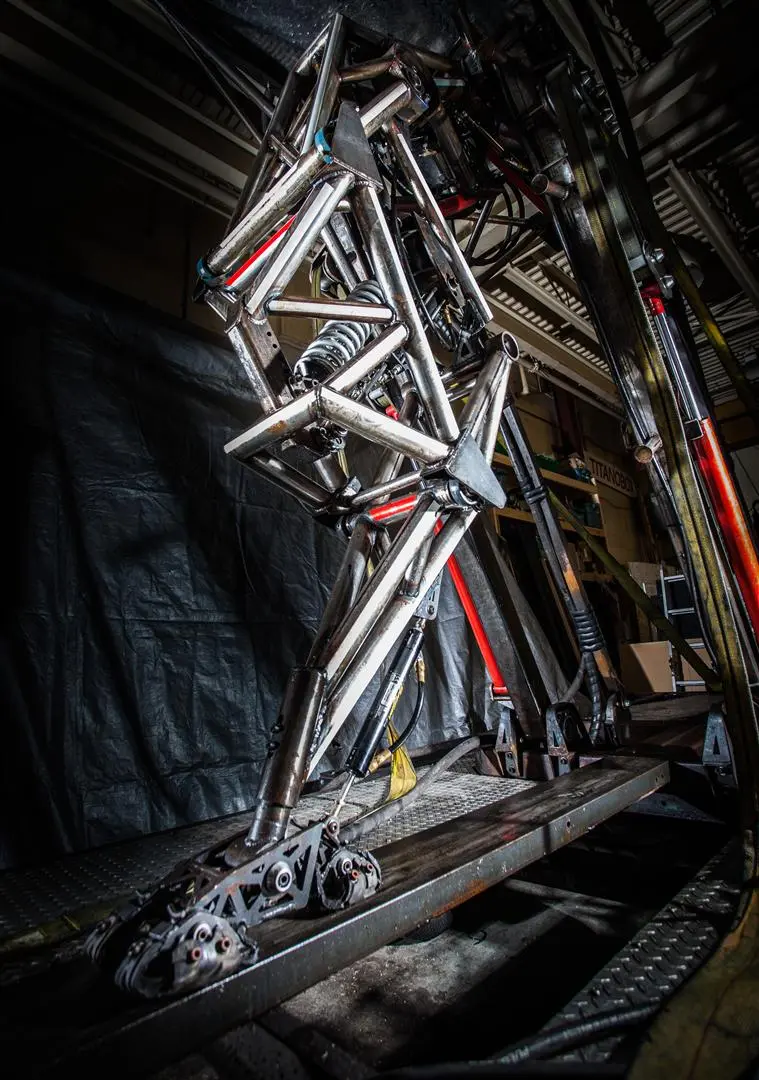
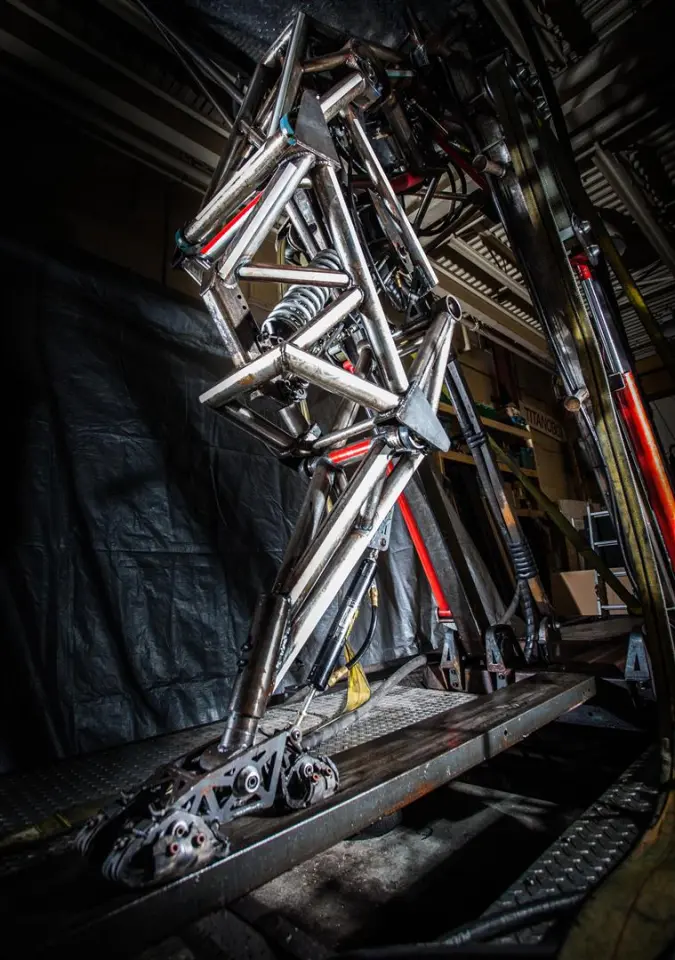
Over a period of three years, Tippett and his team have been developing the underlying technology for Prosthesis with input from more than 65 students and professionals. They've built the Alpha Leg, a functional 2:3 scale prototype of one of the machine's legs, which helped them resolve engineering problems and refine the hydraulics, suspension and control systems.
Tippett is currently seeking funding to complete building Prosthesis on Indeigogo. If successful, the plan is to have Prosthesis available for early backers to pilot by late 2015. If the project receives enough support, he hopes its completion could spawn an entire racing league of Anti-Robots, with different weight classes, power classes, four legs, six legs and more. "Personally, my next machine will be a cat-like machine, the size of a bus, with the pilot suspended face down from its belly," he enthuses.
However advanced the Anti-Robots might get, they'll still all be purely human-controlled creations designed to push the envelope of mastering a physical skill. Creating an entirely new, automation-lacking sport might seem daunting to some, but Tippett isn't fazed.
"For sure Prosthesis could be automated, rendered nothing more than a harmless amusement park ride, or even operated remotely through a simulator," Tippett says. "So could your snowboard, your bicycle or your bungee chord. There is no shortage of human effort going in to automating and virtualizing everything we do. Prosthesis is a two-story tall counterpoint to that entire branch of human development. A reminder that it's the greatest challenges make you feel the most alive."
Check out a video of Prosthesis and the Alpha Leg below.
Sources: Anti-Robot, Indiegogo





