

Quadcopter drones are most stable with their four propellers arranged in a square configuration, with one prop at each corner of the square when viewed from above. Such a setup does make it difficult for the aircraft to fit through tight spaces, however. That's where the Quad-Morphing drone comes in.
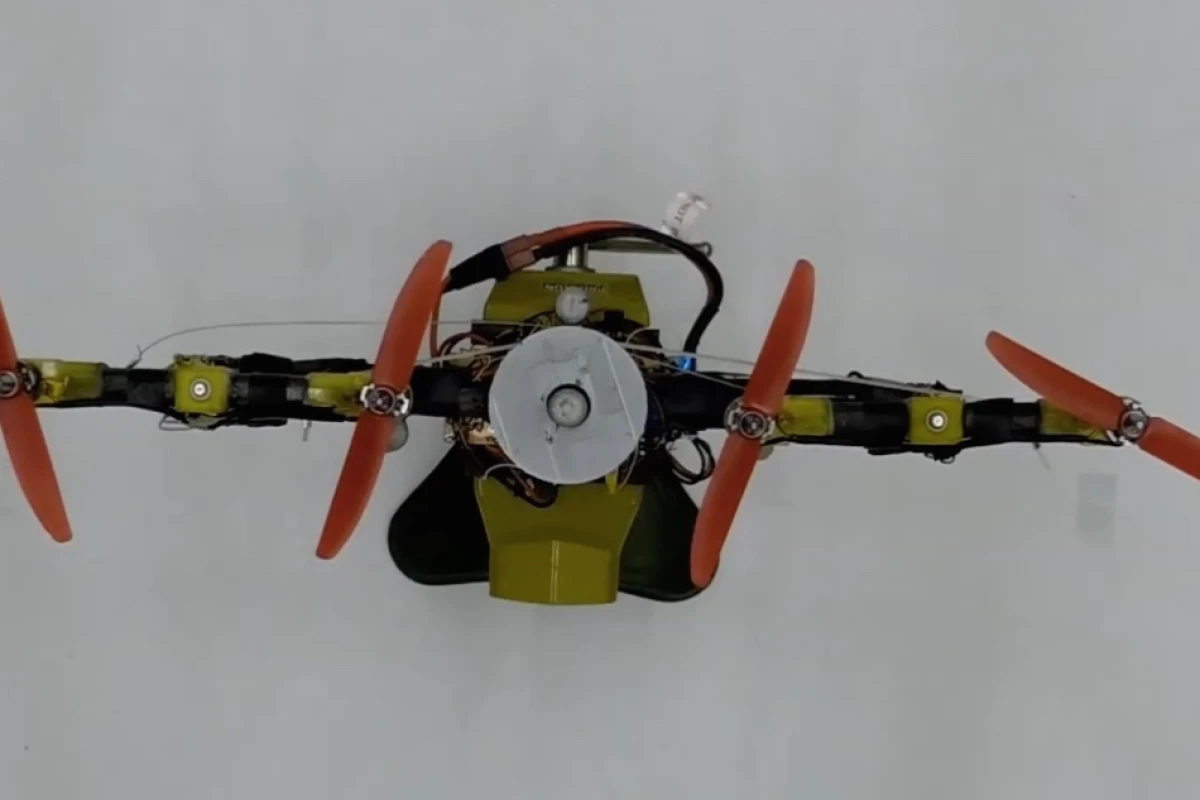
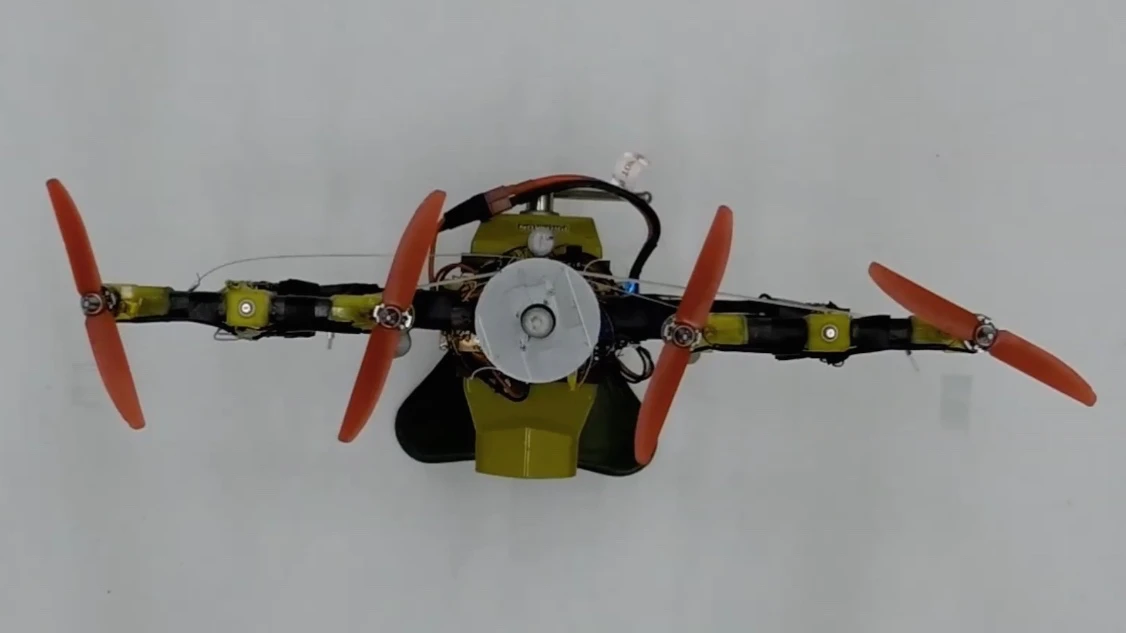
Created at France's Étienne Jules Marey Institute of Movement Sciences (which is affiliated with the French National Center for Scientific Research), the copter is equipped with two horizontal arms, each one with an upwards-facing propeller at either end. In regular flight, those arms sit perpendicular to the drone's central axis, positioning the four props in the traditional square – or in this case more rectangular – arrangement.
When the aircraft has to squeeze through a gap, though, a system of flexible and rigid wires rotates the arms so that they're sitting parallel to the drone's central axis. This puts the four propellers all in a row, halving the wingspan.
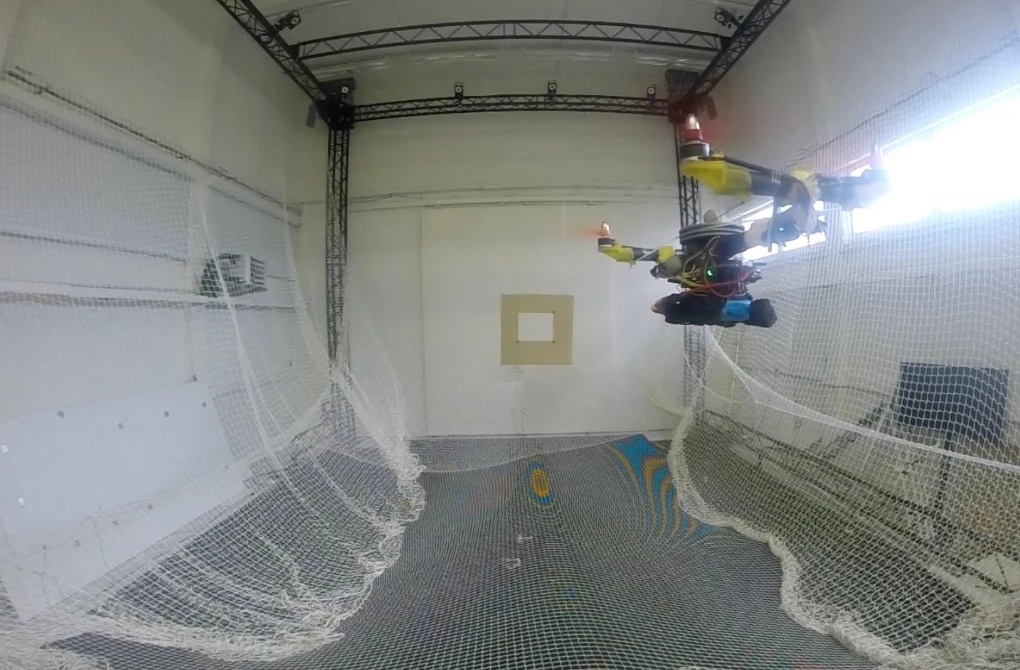
Although this configuration offers less stability and control, all it really has to do is keep the quadcopter moving forward as it goes through the gap at a speed of 9 km/h (5.6 mph). Once it's through, the arms rotate back out again.
In the current indoor testing setup, the arm-rotation is triggered by a 3D localization system incorporating an array of 17 stationary cameras that track the drone as it flies. The copter is also equipped with an onboard miniature high-speed camera, however, which should ultimately allow it to independently assess gap sizes and rotate its arms as needed.
A paper on the research was recently published in the journal Soft Robotics. You can see a video of the Quad-Morphing drone in flight via the link below.
Source: CNRS





