
For anyone who worries about being caught in a cave-in, you'll be glad to know that tunnels such as those found in subways or mountain roads are regularly checked for structural degradation. These tests are typically performed using the naked human eye, and require the tunnel to be closed to use for as long as the process takes. With this in mind, the European Union ROBINSPECT program is now developing a robotic tunnel inspection system, that should be both quicker and more thorough than human inspectors.
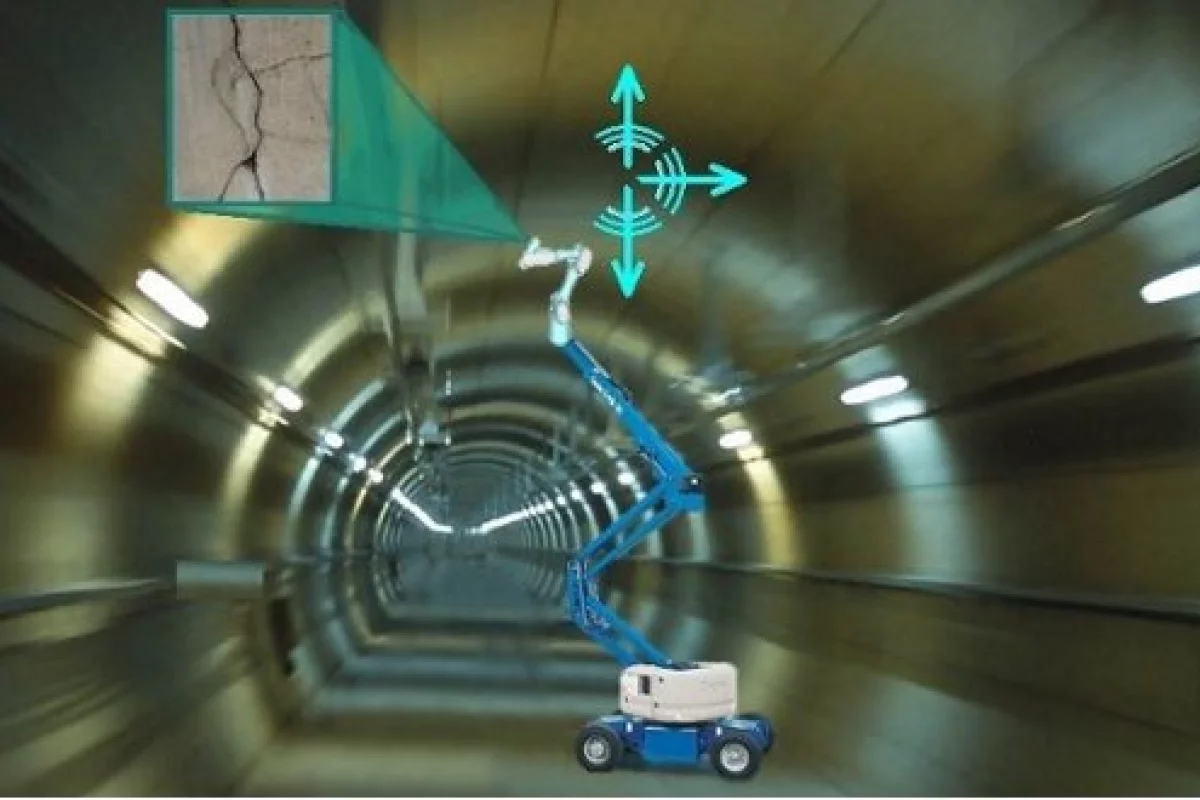
At the heart of the system will be a semi-autonomous robotic unit, consisting of a small unmanned vehicle with a crane mounted on top of it. On the end of that crane will be a robotic arm, containing multiple sensors.
The whole setup will move down the length of a subway, motorway or other tunnel, conducting a complete inspection in one pass. Along with cracks, faults such as rust stains, corrosion, and exposed reinforcements will also be sought out.
At a rate of about one meter per second, the robot will use its computer vision system to rapidly acquire rough 2D images of every inch of that tunnel's walls. When cracks meeting certain minimum criteria appear in those images, the robot will proceed to stop and obtain more detailed 3D images. At this point, ultrasound and lasers will also be used, to ascertain the exact width and depth of the cracks.
Human operators will still be able to remotely issue basic commands such as Advance and Stop, although the robot itself will be able to "learn" both from its own findings, and from accessing an online database compiled by human tunnel inspectors. This will allow it to notify its operators, when it does come across flaws that need attention.
It is hoped that when the three-year project is completed, the finished robot will result in increased safety (both for tunnel users and inspectors), shorter tunnel-inspection closure times, and financial savings as less human workers will need to be paid, and for less hours.
A working prototype is expected to be ready by next year, at which point it will be tested in the London underground, three underground stretches of the Egnatia highway in Greece, and some experimental tunnels in Switzerland.
Sources: ROBINSPECT, Universidad Carlos III de Madrid





