

Submarine combat may seem like an obsolete relic from World War II films and Cold War thrillers, but the past 20 years have seen a growing number of increasingly quiet diesel-electric submarines turning up in some very unfriendly navies. In order to counter this threat, the Defense Advanced Research Projects Agency (DARPA) has awarded a contract to the Science Applications International Corporation (SAIC) of McLean, Virginia to develop unmanned submarine hunters capable of operating for months on end without human intervention.
Diesel-electric submarines are a growing worry for the maritime nations of the world. At first glance, they seem no match for their nuclear counterparts that never need refueling and can remain submerged for months at a time, but the diesel boats do have their advantages.
For one thing, they are extremely quiet when running under battery power because they don’t need to run the pumps and other gear needed for a nuclear boat. Unlike older versions, modern diesels can remain submerged for days. Though they have very short ranges, they can operate in shallow coastal areas where nuclear submarines can’t go. And they are much cheaper than nuclear boats.
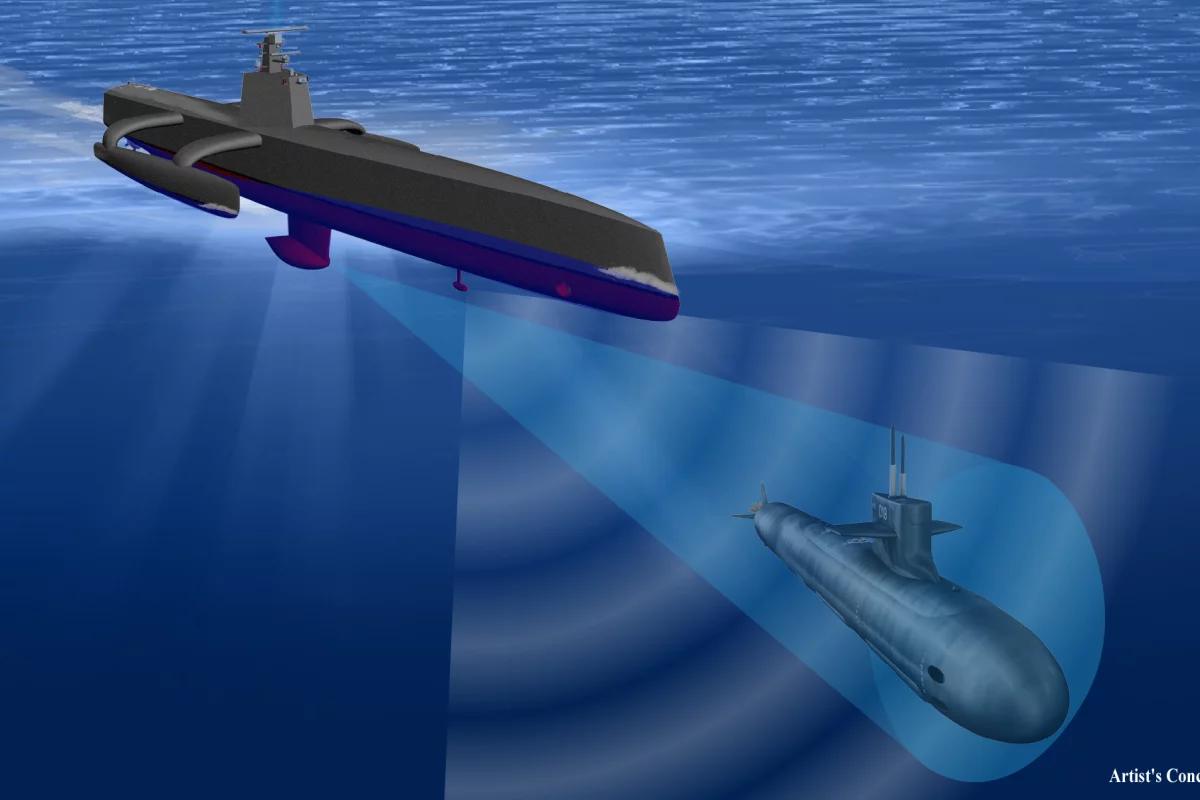
With Western navies shrinking and unfriendly diesel fleets growing, something is needed to fill the gap. DARPA’s Anti-Submarine Warfare (ASW) Continuous Trail Unmanned Vessel (ACTUV) program aims to do this by developing a robot ship that can acquire and track submarines for thousands of miles over a period of months without supervision. Not only that, but it can do so operating safely and in accordance with maritime laws.
Requiring new sensors and advanced autonomous systems as well as propulsion systems capable of outrunning a diesel sub, the ACTUV poses challenges, but also provides new opportunities. Not needing a crew, the robot ship will be much cheaper to build and operate – perhaps a tenth of the cost of a conventional sub hunter. It also means that since it has no crew, it can operate in seas that would be too dangerous for sailors, and it doesn’t need a conventional ship’s dynamic stability and reserve buoyancy.
The ACTUV program is in four phases. Phase 1, already completed, evaluated the concept and performed a risk assessment. Phases 2-4, which SAIC has been contracted to complete, cover the design, construction and demonstration of the vessel. DARPA also hopes that the technology will be applicable to other unmanned ship operations.
Source: DARPA






