
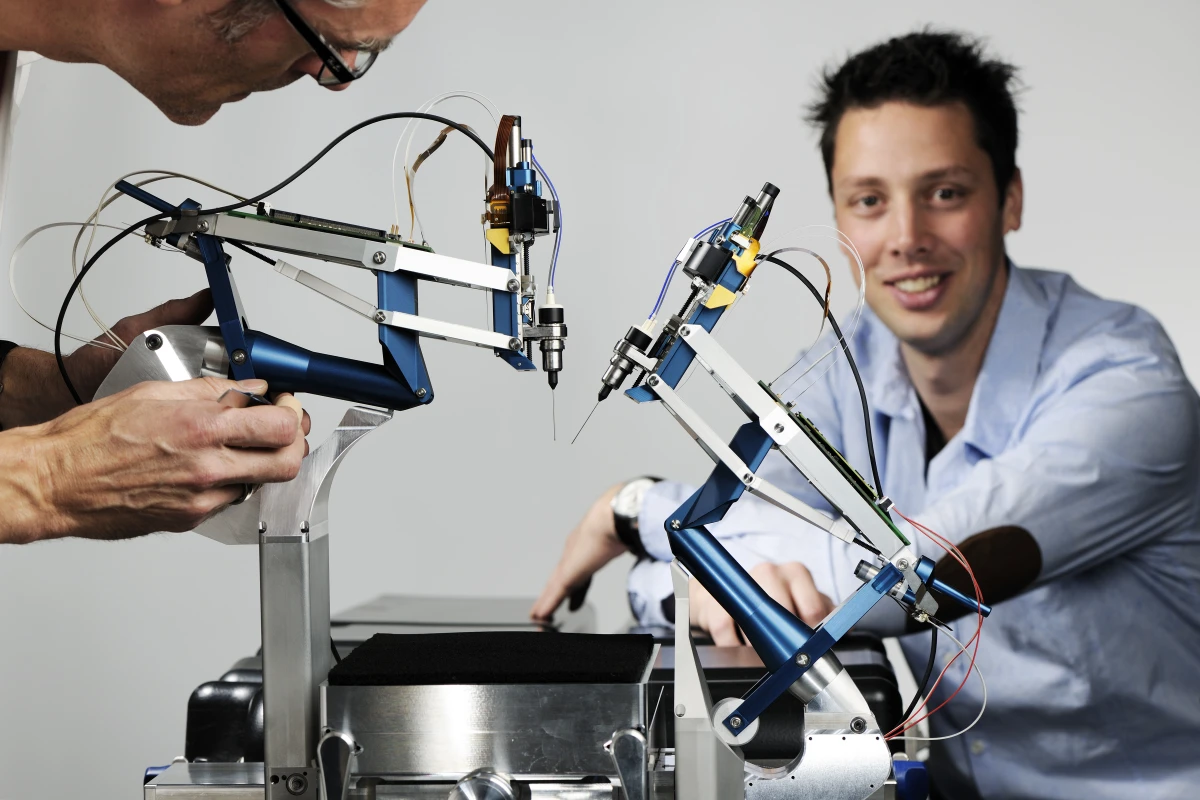
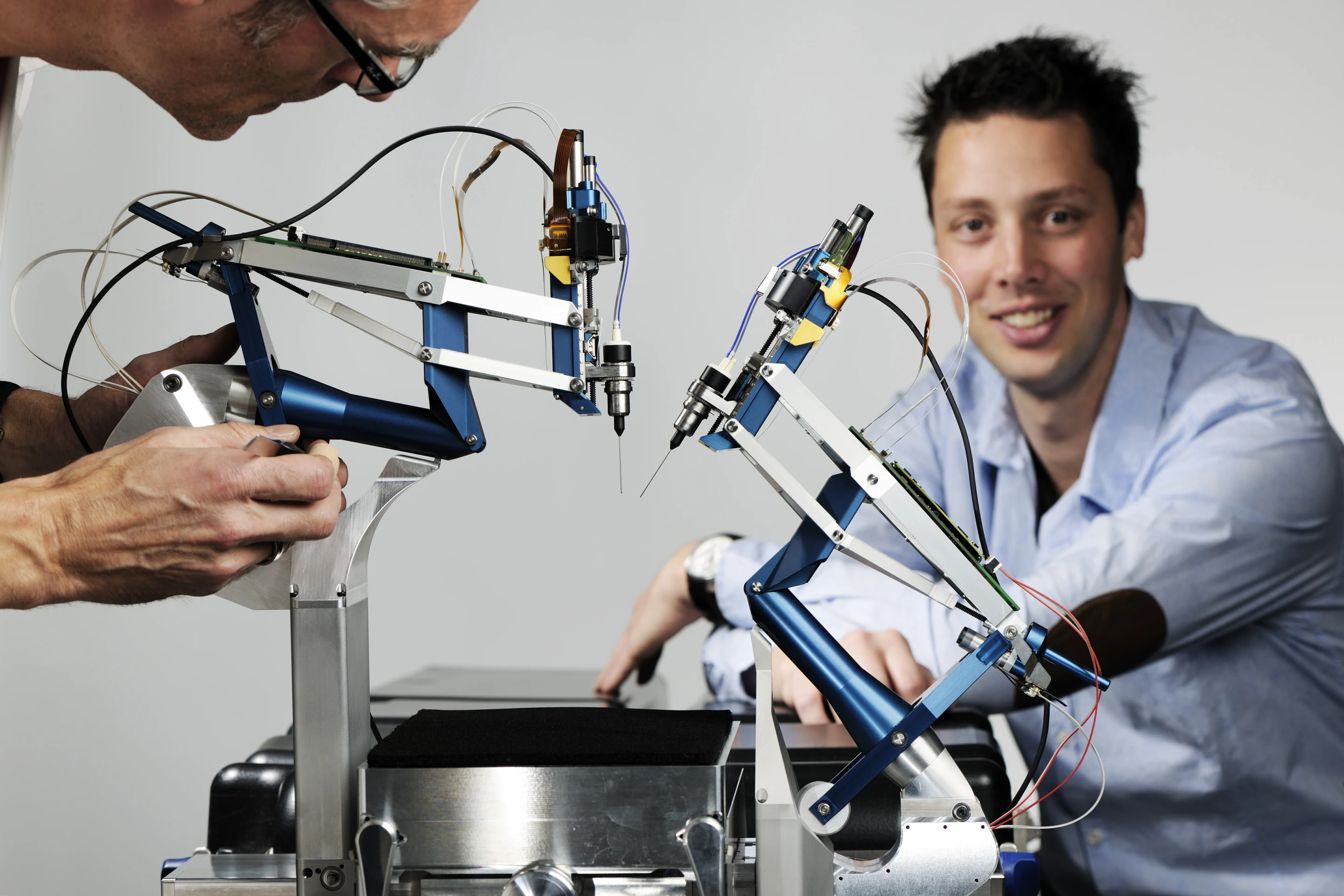
By now, many readers are probably familiar with the da Vinci robotic surgery system. It allows a seated surgeon, using a 3D display and hand controls, to operate on a patient using robotic arms equipped with surgical instruments. Not only does the system allow for more laparoscopic surgery (in which surgical instruments access the inside of the patient's body through small incisions, instead of one large opening), but it even makes it possible for the surgeon and the patient to be in separate geographical locations. Now, a researcher at the Netherlands' Eindhoven University of Technology has developed a similar system, designed specifically for operations on the eye.
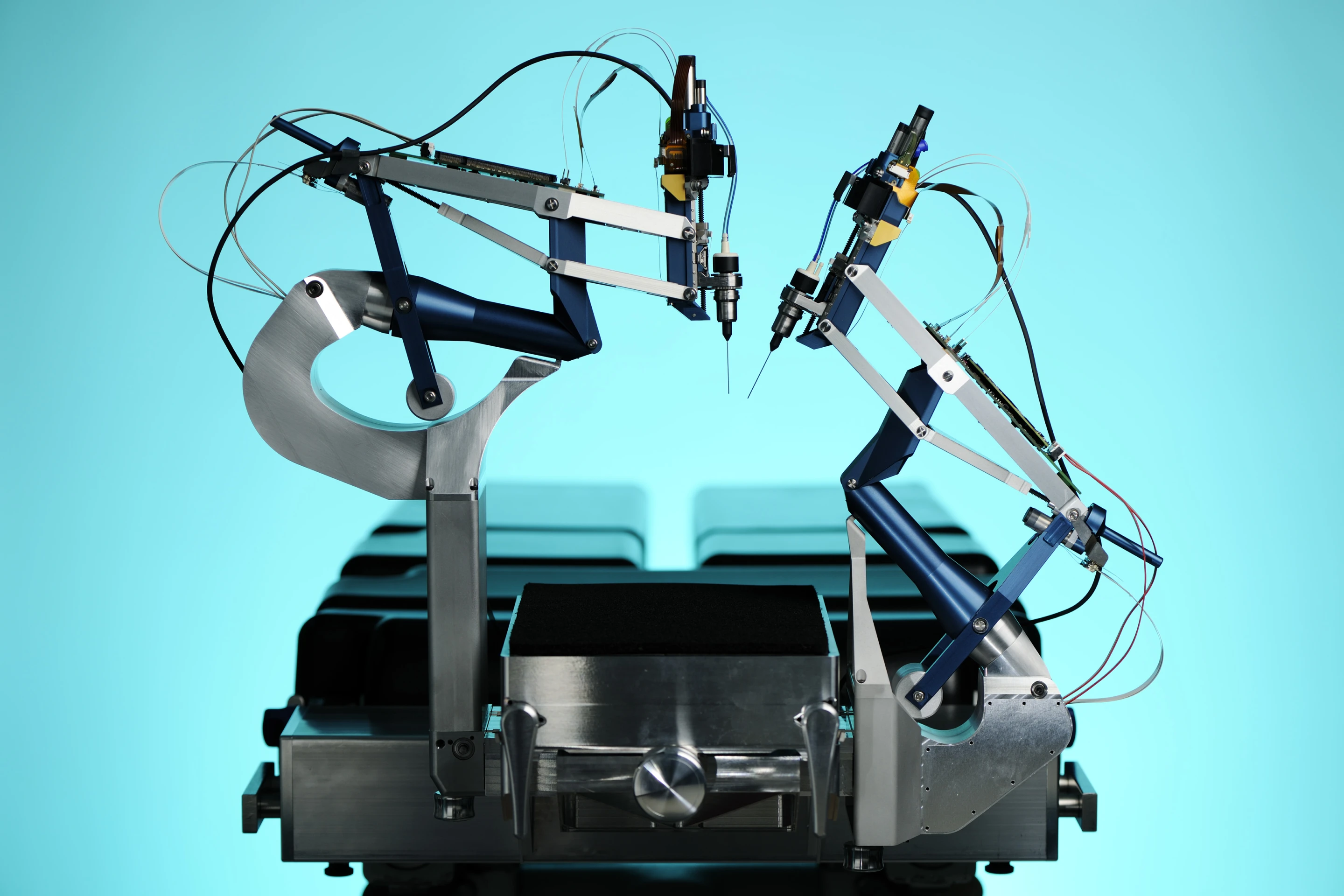
PhD student Thijs Meenink created his robot with procedures on the retina and the vitreous humor in mind. Such eye surgery requires a particularly steady hand - something that surgeons tend to lose as they get older. Consisting of a previously-developed dual-joysticked "master" control unit and Meenik's two-armed "slave" robotic module, the system filters out hand tremors. This is achieved through its scaling down of the operator's hand movements. If the surgeon's hand were to twitch by a centimeter, for instance, the corresponding surgical tool would only twitch by one millimeter. This should result in surgeons being able to keep performing such procedures farther into their careers.
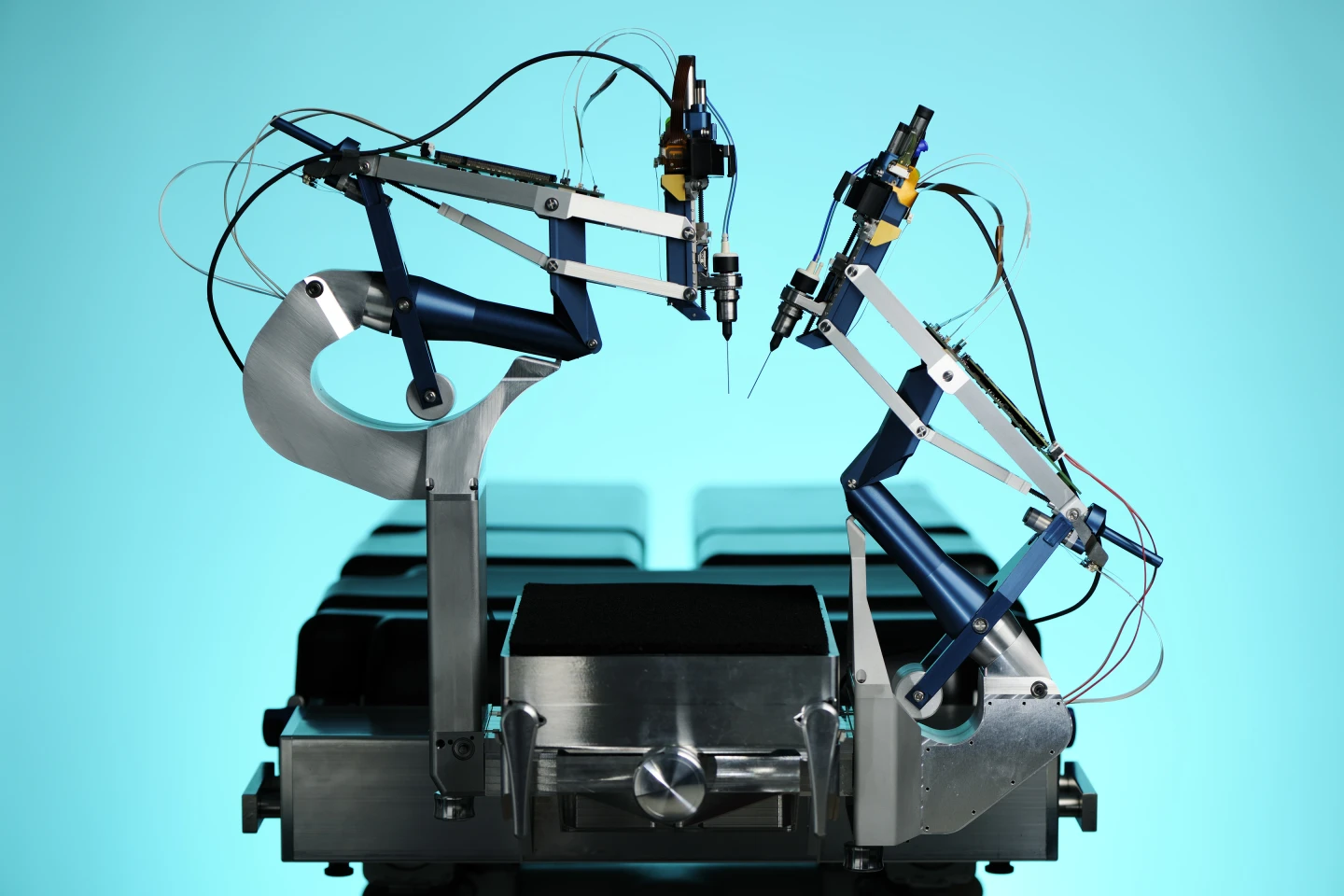
The robot's selection of needle-like instruments are only half a millimeter wide, and include forceps, surgical scissors and drains. They can be interchanged within seconds, which is an important consideration, as one eye operation can reportedly involve up to 40 instrument changes. Due to the precision made possible by the system, those instruments can also enter the patient's eye repeatedly in exactly the same spot, minimizing damage to the eye tissue.
Meenik's system additionally provides haptic feedback through the joysticks. This means that the surgeon is able to feel an approximation of the resistance that the instruments are meeting as they work on the eye, and can proceed accordingly. The procedure should also be physically easier on the surgeon, as they can be seated in an upright position, instead of standing hunched over the patient.
Thijs believes that the first use of the Eindhoven system on a human subject should occur within five years. In the meantime, he is looking into commercializing the technology.





