

In order for robots to operate safely around humans, they need to see that people are approaching and they need to know when they make physical contact with those people. A new system allows them to do both, using cameras located inside their arms.
Known as ProTac (Proximity and Tactile sensing), the technology is being developed by Prof. Van Anh Ho, Dr. Quan Khanh Luu and colleagues at the Japan Advanced Institute of Science and Technology (JAIST). It's been incorporated into a cylindrical robotic arm segment called the ProTac link, although it could also be used in other body parts.
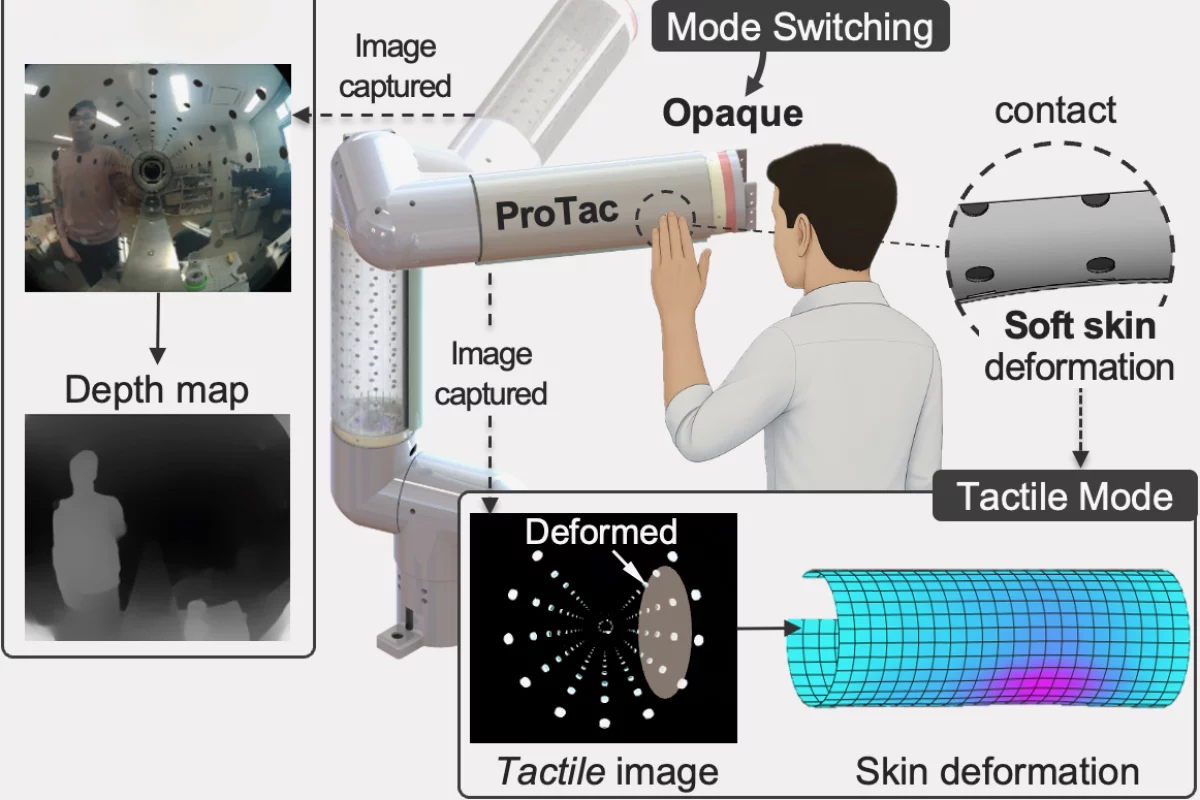
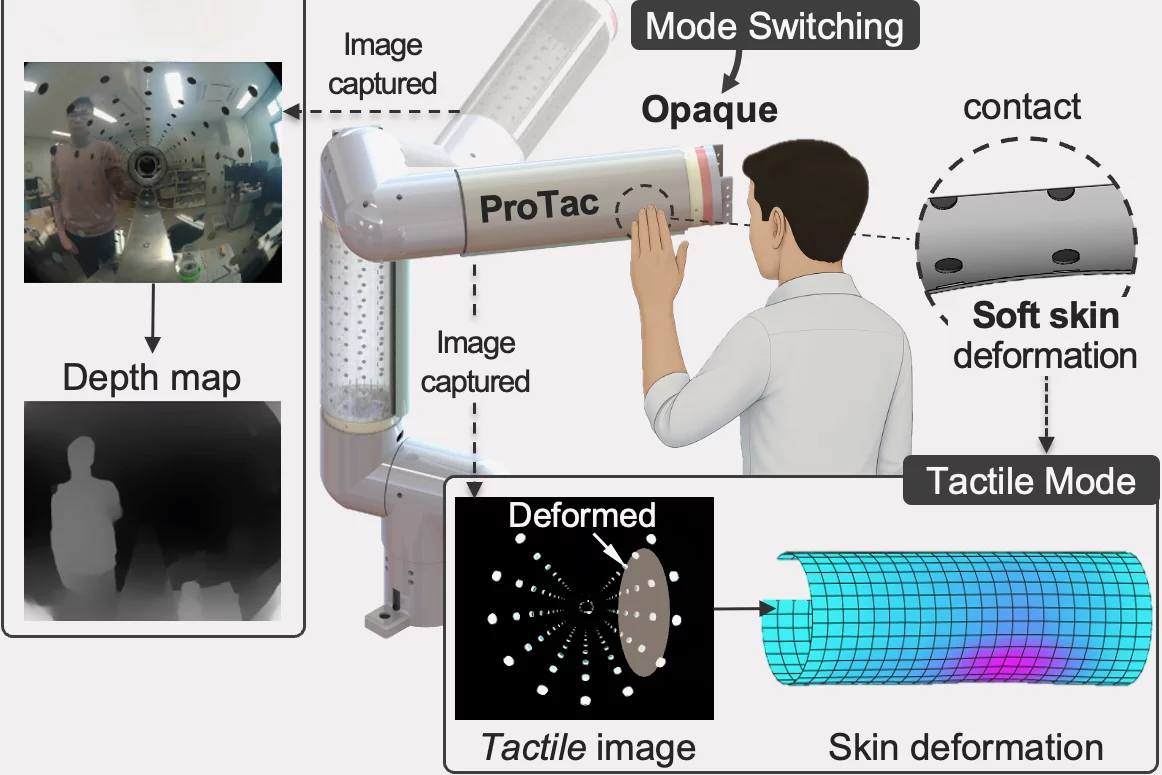
The hollow appendage has a soft, transparent polymer skin, which is covered in a flexible layer of polymer-dispersed liquid crystal (PDLC) material. By applying voltage to the PDLC, it can be quickly switched between transparent and opaque states. On the inside surface of the PDLC is an array of spaced marker dots, which stay opaque at all times.
Two stereoscopic cameras are located inside the arm – one at either end – where they look down the length of the inside of the appendage.

When the PDLC is transparent, the computer-vision-enabled cameras are able to see through it and perceive the outside world. If an object such as a person is seen to be closing in, a robot using the ProTak link could either stop moving so as not to hurt that person, or move out of the way to avoid contacting them.
When the PDLC is opaque, the cameras just see the array of dots suspended over a black background. If someone touches the flexible skin, the pressure causes the spacing between the dots to change at that location. Therefore, when the cameras see such deformations taking place, they're able to determine where the arm is being touched, and with what amount of force.
As an added bonus, ProTac can be set to a "flicker mode" in which the PDLC continuously (and rapidly) switches back and forth between its transparent and opaque states. This allows the system to likewise switch back and forth between proximity- and tactile-sensing, so it can both track moving people and know when they touch the arm.
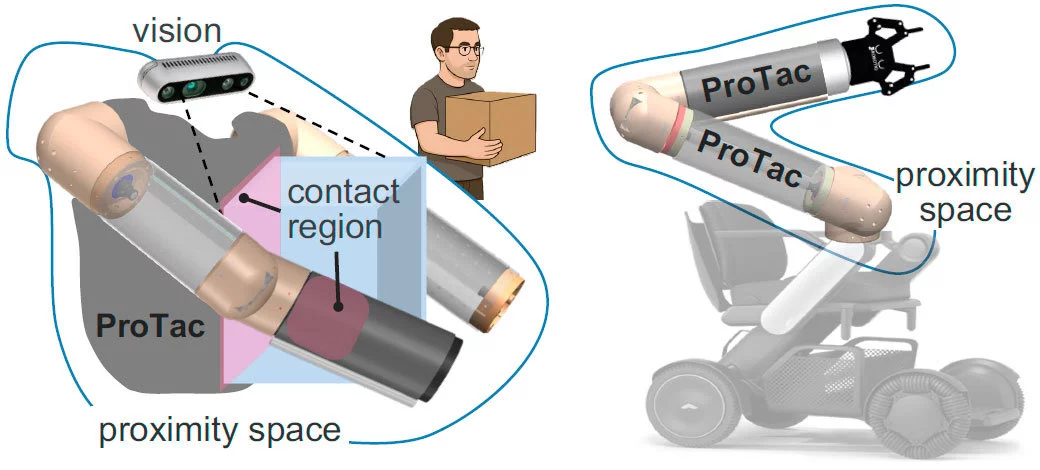
"ProTac can be applied to dexterous robotic manipulation in various domains where safety and delicate physical interaction are critical," says Dr. Luu.
A paper on the research was recently published in the journal IEEE Transactions on Robotics.
Source: JAIST


