
Once again, technology has been inspired by nature. After examining how centipedes traverse rough terrain, researchers created a multi-legged robot that mimics their curved, side-to-side movement, providing greater stability and maneuverability.
Centipedes and millipedes are myriapods, animals with elongated bodies made up of numerous similar segments, nearly all of which have jointed legs attached. Centipedes can move effectively in diverse terrain because their flexible bodies and the number of limbs allow them to adapt their shape to the environment.
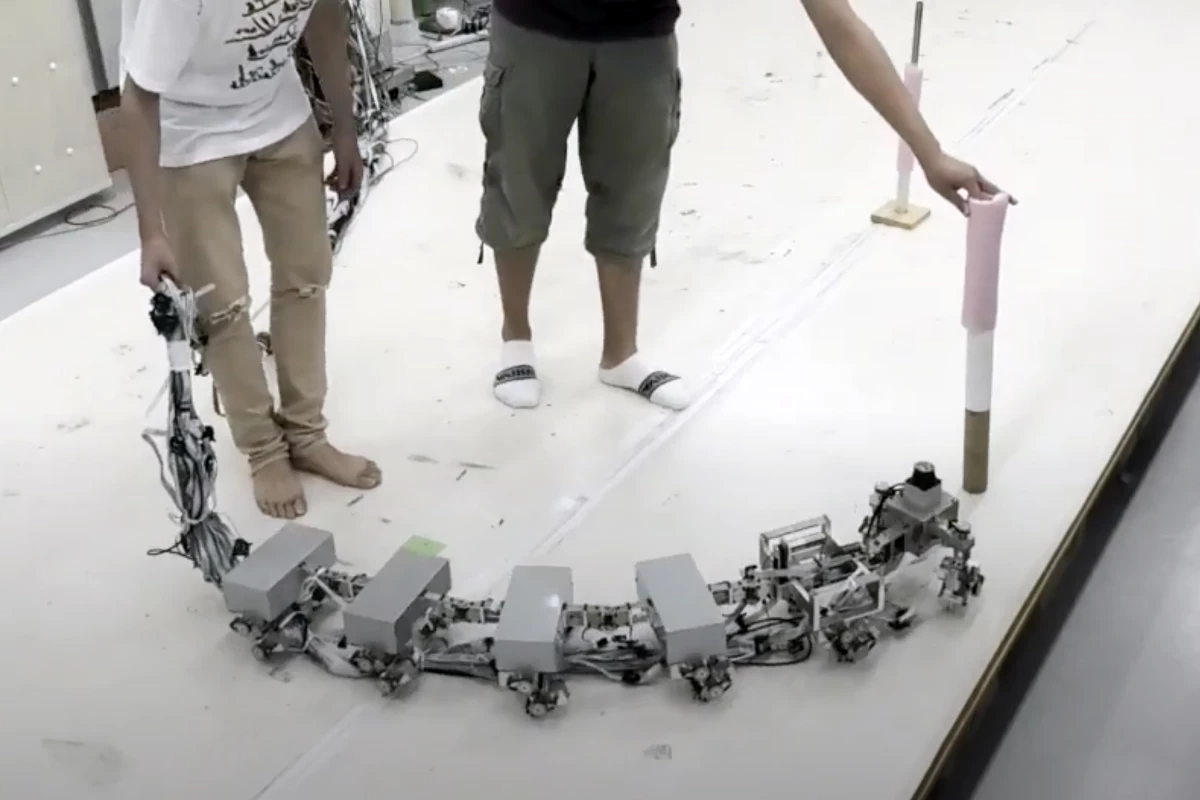
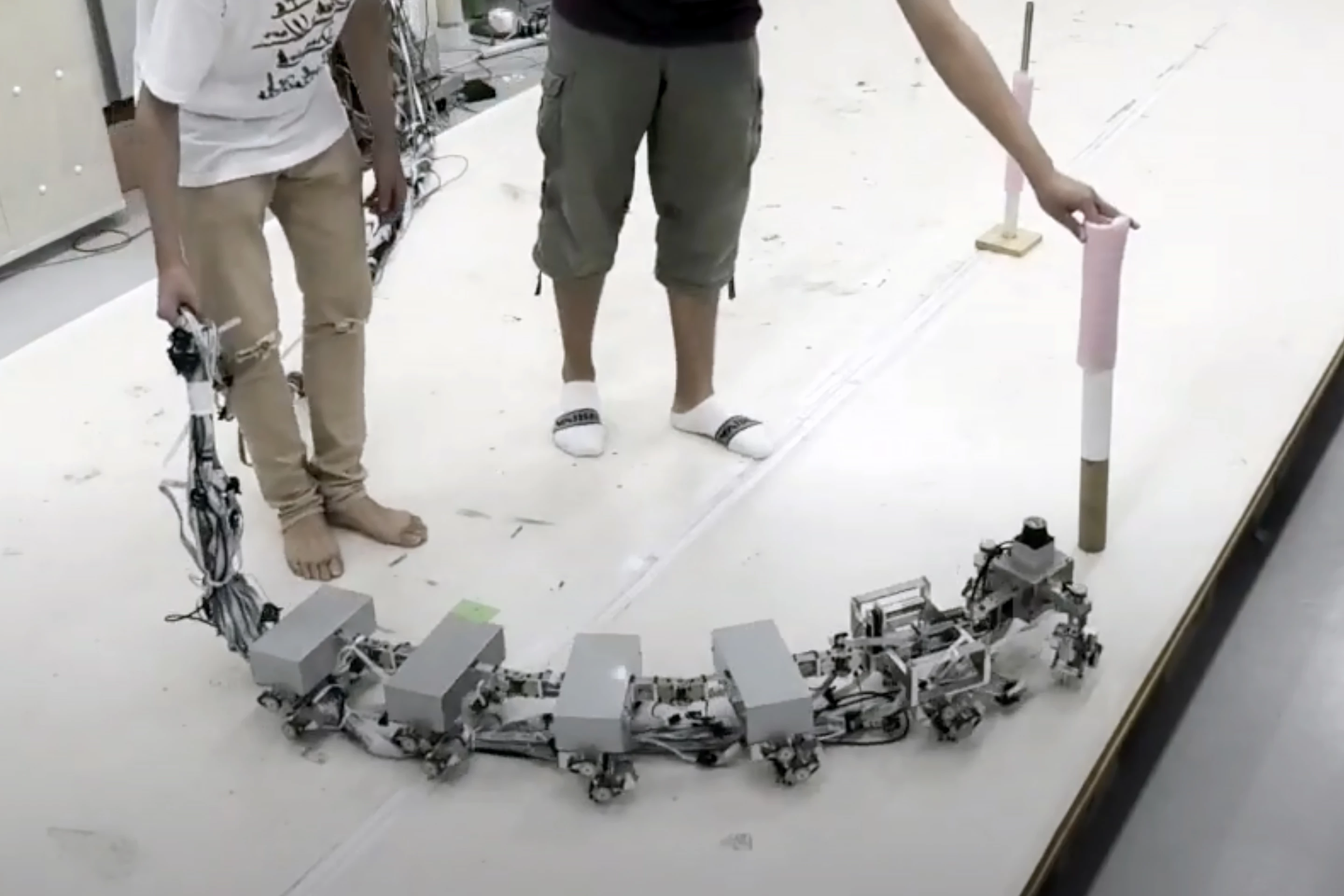
Researchers trying to create biomimetic multi-legged robots have often found that they struggle. When one leg malfunctions due to repeated stress, it can limit the robot’s ability to move. And controlling a large number of legs requires a lot of computer power. Now, researchers from Osaka University in Japan developed their own robotic myriapod with six segments, each containing two legs, and flexible joints.
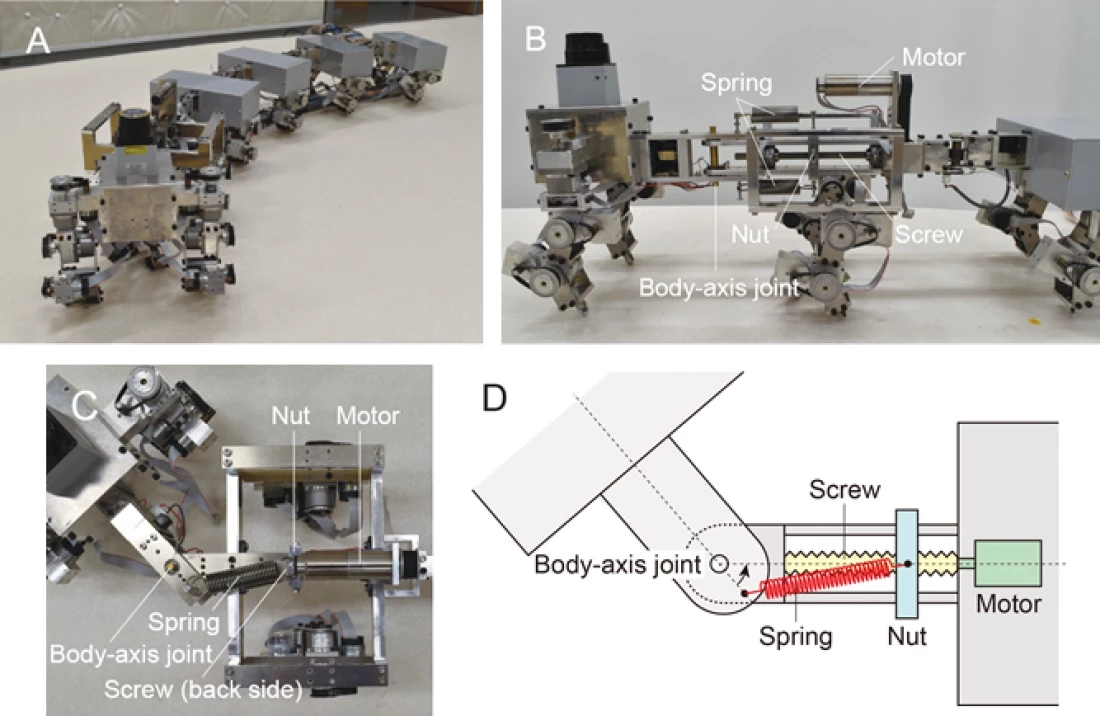
The robot is 53 in (135 cm) in length and weighs 20 lb (9.1 kg). Its six separate segments have a pair of legs attached consisting of two links connected by flexible joints that allow for yaw or movement in different directions.
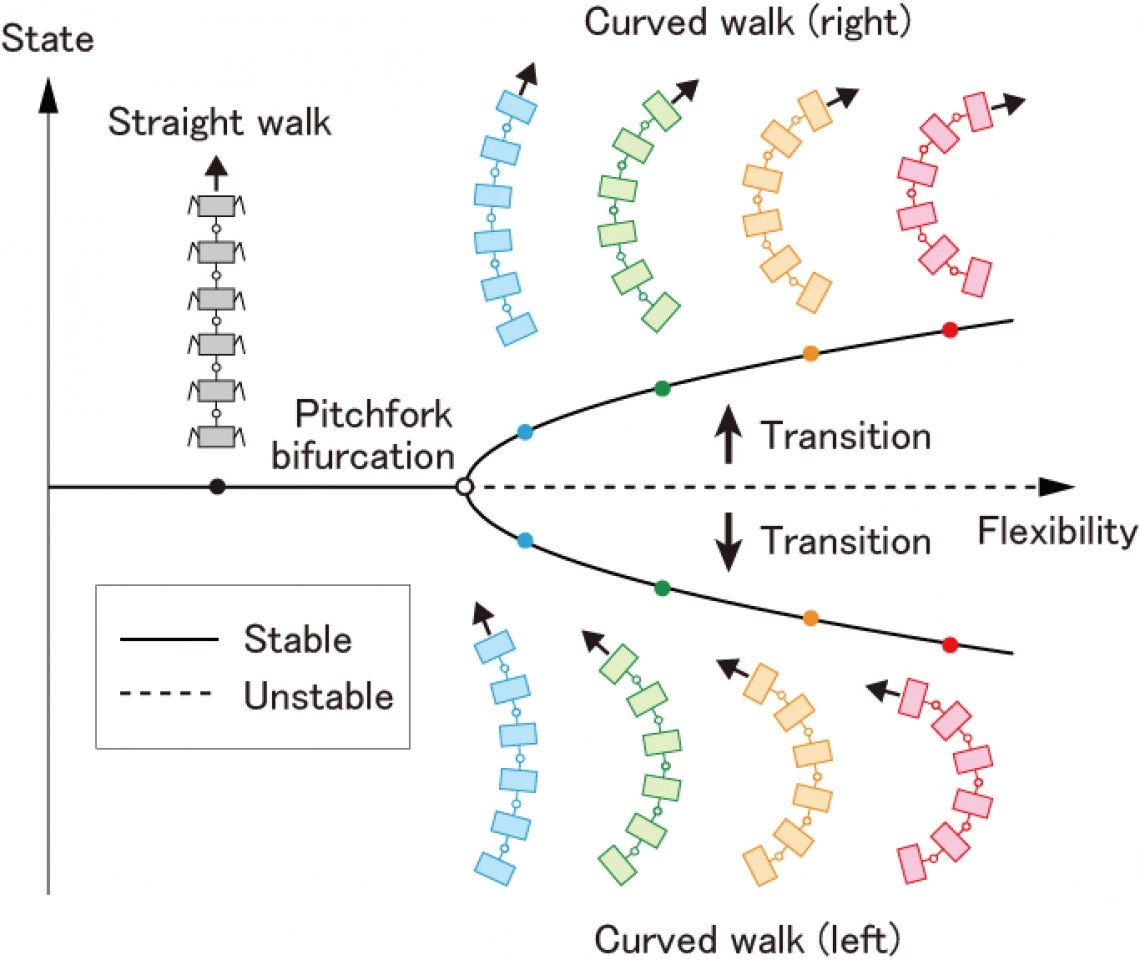
The researchers found that increasing joint flexibility led to ‘pitchfork bifurcation,’ where straight walking becomes unstable. Instead of correcting the instability, the researchers ran with it, allowing the robot to walk in a curved pattern, either to the left or the right, just like a centipede would.
“We were inspired by the ability of certain extremely agile insects that allows them to control the dynamic instability in their own motion to induce quick movement changes,” said Shinya Aoi, lead author of the study.
The researchers found that not directly steering the robot but, instead, controlling its body-axis flexibility greatly reduced the computational complexity and the energy requirements needed to operate the robot.
After testing the robot’s movement, they found that it could make its way to a target via a curved path. The researchers see many applications for their robot myriapod.
“We can foresee applications in a wide variety of scenarios, such as search and rescue, working in hazardous environments or exploration of other planets,” said Mau Adachi, one of the study’s co-authors.
In future, the researchers plan to test their design in more challenging environments, such as on rough terrain.
The study was published in the journal Soft Robotics, and the below video, by the lead author, Shinya Aoi, demonstrates the robot’s maneuverability in reaching set targets.
Source: Osaka University



